

Лабораторна робота №8
ЕКСПЕРИМЕНТАЛЬНЕ ДОСЛІДЖЕННЯ БЕЗКОНТАКТНОЇ СХЕМИ КЕРУВАННЯ ПІДЙОМНОЇ ЛЕБІДКИ
Мета роботи: дослідження безконтактної схеми керування асинхронним електродвигуном підйомної лебідки в нереверсивному і реверсивному режимах роботи.
Зміст роботи: ознайомлення з обладнанням і приборами; зовнішній огляд; перевірка роботи схеми у нереверсивному і реверсивному режимах роботи; перевірка роботи теплового захисту електродвигуна; складення звіту.
Обладнання: асинхронний короткозамкнений електродвигун; схема керування і захисту електродвигуна, контрольно-вимірювальні прибори.
Короткі теоретичні відомості
Управління електродвигуном складається з виконання операцій пуску, реверсу обертання вала електродвигуна і гальмування. Ці операції виконуються за допомогою пускачів або контакторів, а також додаткових електричних апаратів: реле, кнопок, вимикачів тощо.
На рис.1 наведена безконтактна схема автоматичного керування реверсивним електроприводом з асинхронним короткозамкненим електродвигуном.
Живлення асинхронного електродвигуна М здійснюється від трьохфазної мережі з напругою ~380 В. Захист від струмів короткого замикання здійснюється за допомогою автоматичного вимикача QF1. Реверс обертання асинхронного електродвигуна виконується зміною чергування двох фаз живлячої мережі, яке

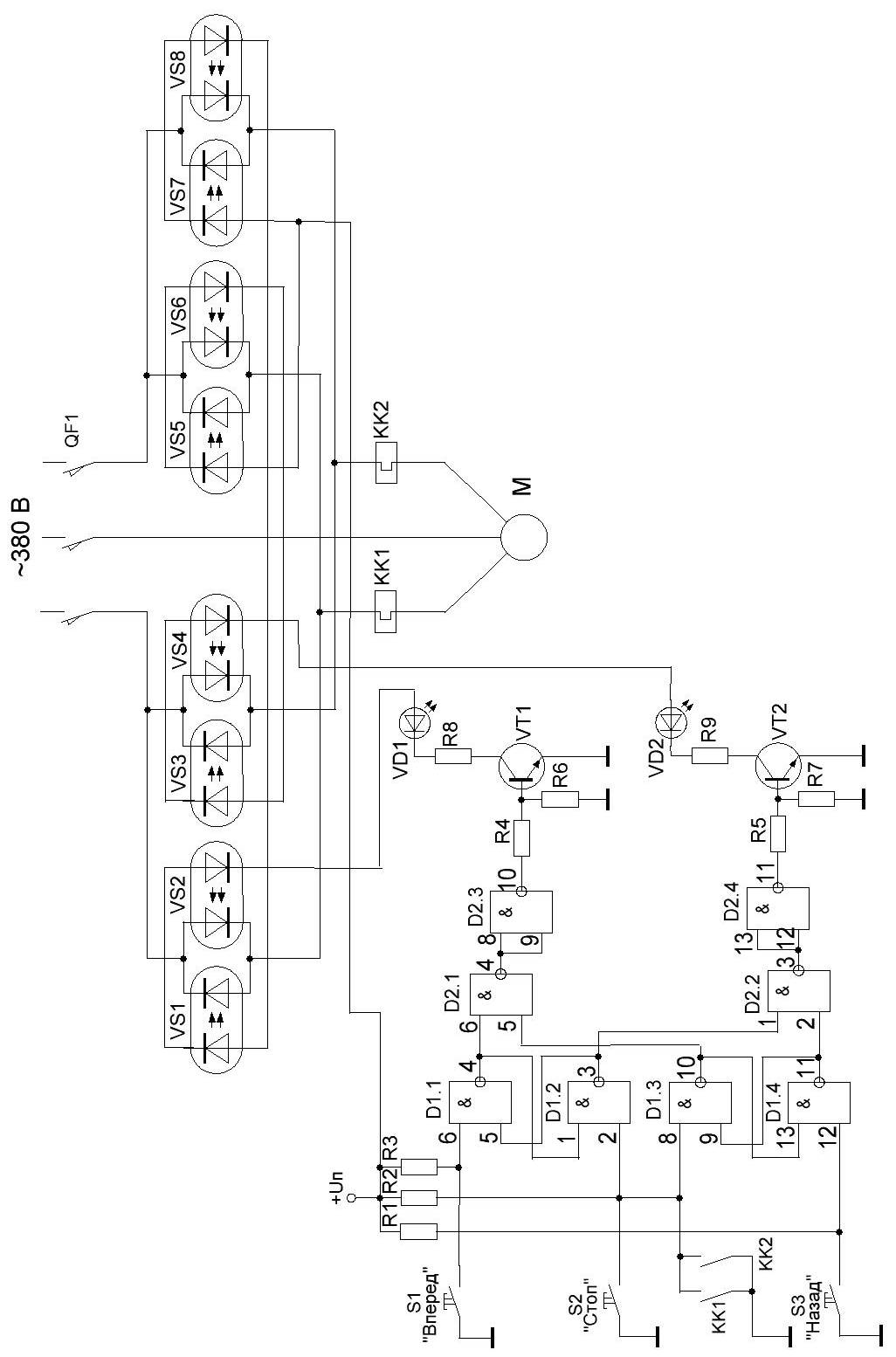
виходить при включенні тиристорів VS3…VS6 або VS1,VS2,VS7,VS8.
Тепловий захист електродвигуна від перевантаження здійснюється за допомогою теплових реле КК1 і КК2.
Для обертання «Вперед» необхідно нажати кнопку S1 «Вперед». На виходах 4 і 11 мікросхеми D1.1 і D1.4 має місце логічний сигнал 0, а на виходах 3 і 10 мікросхеми D1.2 і D1.3-
логічний сигнал 1. Логічний сигнал 0 має напругу близько нуля, а логічний сигнал 1 – близько напруги живлення мікросхеми. З натиском кнопки S1 логічний сигнал 0 надходить на вхід 6 мікросхеми D1.1 і на виході 4 мікросхеми D1.1 з’являється логічний сигнал 1. В табл.1 наведені варіанти вихідних сигналів при різних вхідних сигналів дискретних елементів І-НІ.
Таблиця 1
А |
0 |
0 |
1 |
1 |
В |
0 |
1 |
0 |
1 |
Х=І-НІ |
1 |
1 |
1 |
0 |
Таким чином, згідно табл.1, при однакових сигналах 1 на входах D2.1 на виході 4 мікросхеми D2.1 буде логічний сигнал 0, а після інверсії на виході 10 мікросхеми D2.3 – логічний сигнал 1. Цей сигнал викликає відкриття транзистору VT1 і протікання струму через світлодіоди тиристорів VS1,VS2,VS7,VS8. Це призводить до відкриття оптотиристорів і подачі напруги живлення на асинхронний електродвигун. При цьому здійснюється обертання «Вперед».
Два елемента D1.1,D1.2 складають схему елемента тригера, який запам’ятовує включений стан тригера і не перекидається при дребезгу контактів S1.
Для відключення асинхронного електродвигуна від живлячої мережі необхідно натиснути на кнопку S2 «Стоп». При цьому тригер переключається і на виході 4 мікросхеми D1.1 з’являється логічний сигнал 0, а на виході 4 мікросхеми D2.1 –
логічний сигнал 1. Після інверсії на виході 10 елемента D2.3 – логічний сигнал 0, що викликає закриття транзистору VT1 і спадання струму через світло діоди тиристорів до нуля, відключення тиристорів VS1,VS2,VS7,VS8 і зупинку електродвигуна.
Для обертання «Назад» необхідно нажати кнопку S3 «Назад». На виходах 4 і 11 мікросхеми D1.1 і D1.4 має місце логічний сигнал 0, а на виходах 3 і 10 мікросхеми D1.2 і D1.3- логічний сигнал 1. З натиском кнопки S3 логічний сигнал 0 надходить на вхід 12 мікросхеми D1.4 і на виході 11 мікросхеми D1.4 з’являється логічний сигнал 1.
При однакових сигналах 1 на входах D2.2 на виході 3 мікросхеми D2.2 буде логічний сигнал 0, а після інверсії на виході 11 мікросхеми D2.4 – логічний сигнал 1. Цей сигнал викликає відкриття транзистору VT2 і протікання струму через світлодіоди тиристорів VS3-VS6. Це призводить до відкриття оптотиристорів і подачі напруги живлення на асинхронний електродвигун з реверсом обертання.
Два елемента D1.3,D1.4 складають схему елемента тригера, який запам’ятовує включений стан тригера і не перекидається при дребезгу контактів S3.
При спрацюванні теплових реле КК1,КК2 на входи 2 мікросхеми D1.2 і 8 мікросхеми D1.3 надходить логічний сигнал 0, що призводить до відновлення станів тригерів D1.1,D1.2 і D1.3,D1,4.Логічні сигнали 0 надходять на вхід 6 мікросхеми D2.1 і вхід 2 мікросхеми D2.2, що в подальшому викликає відключення транзисторів VT1,VT2 і тиристорів, які були включені.
Наведена схема електропривода використовується для різних механізмів. Розглянемо використання її для лабораторної однокінцевої підйомної лебідки, кінематична схема якої наведена на рис.2.
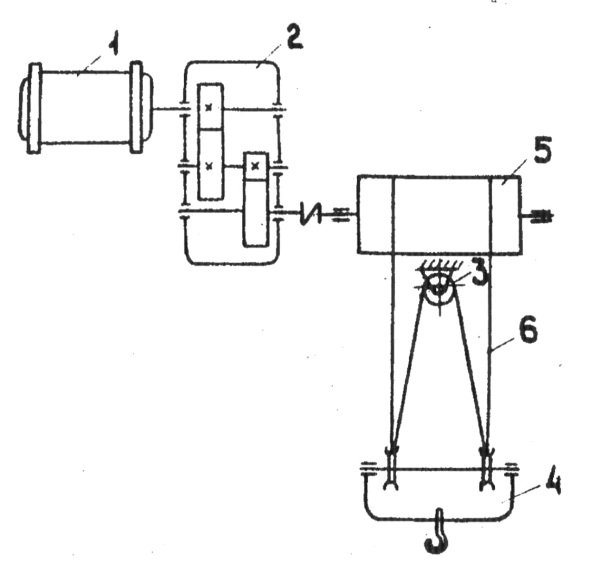
Рис.2.Кінематична схема одно кінцевої лебідки.
Механізм складається з двигуна 1, редуктора 2, поліспаста 3, вантажозахоплювальний пристрій 4, привідний барабан 5 і гнучкий трос 6.
Час руху вантажу визначається:
![]()
де H – висота підйому, м;
V – швидкість руху вантажу.
Статичний момент на валу двигуна визначається:
![]()
де Go,Gв – маса вантажозахоплювального пристрою та вантажу;
Dб – діаметр барабану лебідки;
iр,iп – передавальне число редуктора та поліспаста;
η – к.к.д. механізмів.
Потужність двигуна лебідки визначається:
![]()
де kз – коефіцієнт запасу, kз =1,1 – 1,3.
Частота обертання двигуна визначається:
![]()
Виконати розрахунок необхідних потужності і частоти обертання двигуна для умов лабораторного стенду:
V=0,1 м/с; Н=2 м; Dб=0,03 м; Go+Gв=90 кг; η=0,65; iр=4; iп=10.