

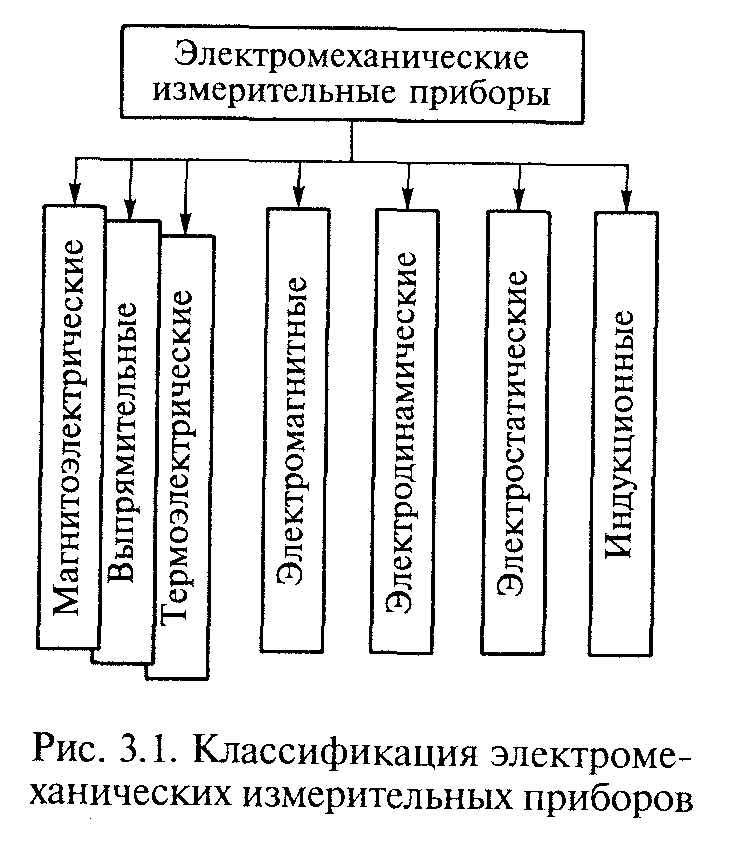
3. Электромеханические измерительные приборы
Любой ЭИП состоит из ряда функциональных преобразователей, каждый из которых решает свою элементарную задачу в цепи преобразований.
Так, самый простейший прибор прямого преобразования (вольтметр, амперметр) состоит из трех основных преобразователей:
измерительной цепи (ИЦ),
измерительного механизма (ИМ) и
отсчетного устройства (ОУ) (рис. ).
Измерительная цепь обеспечивает преобразование электрической измеряемой величины Х в промежуточную электрическую величину Y (ток или напряжение), функционально связанную с измеряемой величиной и непосредственно воздействующую на измерительный механизм.
Измерительный механизм является электромеханическим преобразователем, осуществляющим преобразование электрической величины Y в наглядное аналоговое показание

На магнитном воздействии электрического тока основаны:
магнитоэлектрический,

электромагнитный,

индукционный,

Электродинамический,

вибрационный ИМ;

на тепловом воздействии электрического тока — биметаллический и тепловой ИМ.

На взаимодействии заряженных электродов, находящихся под напряжением, основан принцип работы электростатического ИМ.

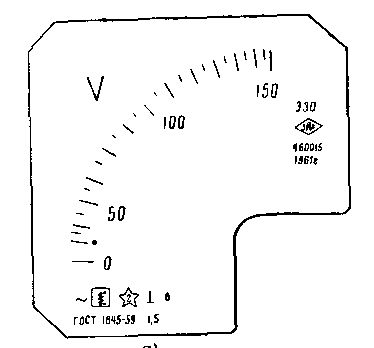
Отсчетное устройство состоит из указателя, жестко связанного с подвижной частью ИМ, и неподвижной шкалы. Указатели бывают стрелочные (механические) и световые.
Шкала — совокупность отметок в виде штрихов, расположенных вдоль линии, по которым определяют числовое значение измеряемой величины.
Шкалы градуируют в единицах измеряемой величины (именованная шкала), либо в делениях (неименованная шкала).
В общем случае на подвижную часть ИМ при ее движении воздействуют вращающий момент М, моменты: противодействующий М и успокоения М
ШКАЛЫ ПРИБОРОВ
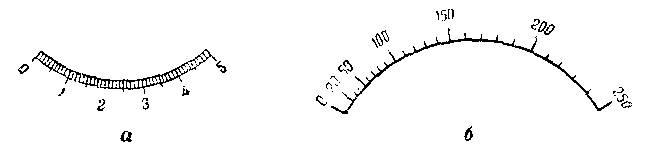
ШКАЛА АНАЛОВОГО ПРИБОРА

Делением шкалы называется промежуток Δl между двумя соседними отметками шкалы
Длина деления шкалы — расстояние между осями двух соседних отметок.
Цена деления шкалы — разность значений величины, соответствующих двум соседним отметкам шкалы
Отсчетом называют число, определенное по отсчетному устройству.
Показание прибора — значение величины, определяемое по отсчетному устройству и выраженное в принятых единицах этой величины
Диапазон показаний (ДП) — область значений шкалы, ограниченная конечным (наибольшим) и начальным (наименьшим) значениями физической величины, указанными на шкале.
Диапазон измерений (ДИ) — область значений измеряемой величины, для которой нормирована погрешность средства измерений.
Предел измерений — наибольшее или наименьшее значение диапазона измерений.
Вращающий момент для ИМ, использующих силы электромагнитного поля
Мвр =dWм / d α (3.1)
где dWм — изменение запаса энергии и магнитного поля; α - угол отклонения подвижной части
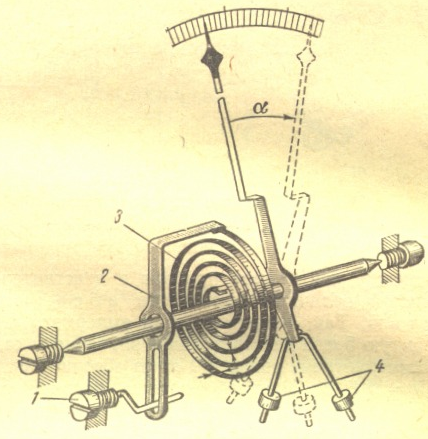
Противодействующий момент в электромеханических приборах необходим для создания соответствия измеряемой величины определенному отклонения подвижной части.
В аналоговых электромеханических приборах противодействующий момент создается либо при помощи спиральных пружин (растяжек и подвесов), либо за счет энергии электромагнитного поля (в логометрах).
В случае, когда противодействующий момент создается спиральной пружинкой.
Мпр = W ·α (3.2)
где W – удельный противодействующий момент, зависящий от геометрических размеров
и материала пружины (растяжек).
Момент успокоения является моментом сил сопротивления движению, направлен всегда навстречу движению подвижной части ИМ и пропорционален угловой скорости отклонения:
Мусп = Р (d α / dt) (3.3)
где Р — коэффициент успокоения (демпфирования).
В ИМ наиболее часто применяют магнитоиндукционные и воздушные успокоители, а для создания очень большого успокоения — жидкостные успокоители.
Несмотря на большое разнообразие конструкций и типов приборов все они имеют ряд общих узлов и деталей. Такими деталями являются: корпус, шкала, указатель устройства для установки и уравновешивания подвижной части, создания противодействующего момента и успокоения, корректор и в высокочувствительных приборах — арретир.
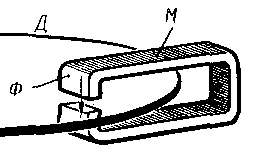
УСПОКОИТЕЛИ ИМ

Физика работы магнитоиндукционного успокоителя
Работа магнитоиндукционного успокоителя основана на взаимодействии индукционного тока, возбужденного в металлической подвижной части прибора при ее перемещении в магнитном поле постоянного магнита. Пусть диск
тормоза перемещается - вправо.
Направление индукционного тока по правилу «правой руки»-от нас, что на рис обозначено плюсом +. На проводник с током в магнитном поле действует сила Ампера.
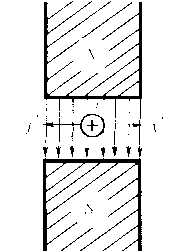
По правилу «левой руки» эта сила F будет направлена - влево,
т.е. в противоположную сторону от
движения диска тормоза. Диск тормозится - гасятся колебания стрелки.