

2.1.6. Методичні вказівки до виконання
1. Увійдіть у програмне середовище Matlab.
2. У командному вікні викличте керуючу програму, набравши у командному рядку її ім’я
>> sug_m
і клавішу <Enter>. Якщо усе зроблено правильно, у командному вікні має виникнути напис
%
% Перед Вами програма SUG_M.m
% "Моделювання поводження
% СИМЕТРИЧНОГО УРІВНОВАЖЕНОГО ГІРОСКОПА"
% яка складає програмну основу
% лабораторної роботи N% 2 з дисципліни
% "Основи теорії ЧУТЛИВИХ ЕЛЕМЕНТІВ"
%
echo off
а на екрані має виникнути невеличке вікно з меню (рис. 2.7).
3. Натисніть (за допомогою миші) клавішу "Продовжити роботу".
Рис. 2.7. Меню продовження роботи
У командному вікні додатково виникне напис
Введіть ваше прізвище та ініціали (в апострофах)
Введіть ваше прізвище, або натисніть клавішу <Enter>. На екрані виникне меню (рис. 2.8)
5. Ознайомтеся з прийнятими значеннями даних і порівняйте їх з потрібними вам для виконання поточного завдання. Якщо щось з того, що запропоновано меню, потрібно змінити, натисніть відповідну клавішу меню. Виникне додаткове меню з конкретними величинами, які потребують змінення. Натискаючи відповідну клавішу цьог меню, ви дістаєте змогу змінити значення потрібного параметру у командному вікні.
Встановіть потрібні для виконання завдання значення параметрів гіроскопа, початкових умов і моментів сил.
При потребі змінити значення одного з зазначених у меню параметрів, слід обрати відповідну кнопку меню. Варто пом'ятати, що введення нового значення обраного параметра відбувається у командному вікні, тому після обрання параметра слід активізувати командне вікно, набрати в ньому нове значення і натиснути <Enter>. Вихід з меню здійснюється натисканням кнопки Нічого не змінювати доти, поки вікна з меню не зникнуть. Після цього можна починати нове моделювання зі зміненими значеннями параметрів.
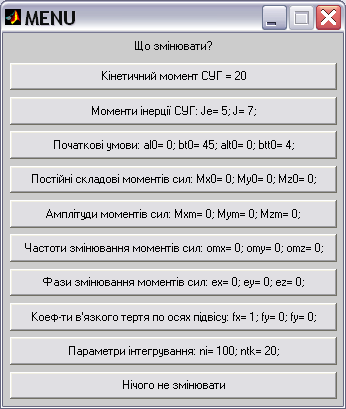
Рис. 2.8. Меню змінювання даних
Якщо встановлені значення параметрів вас задовольняють, натисніть клавішу "Нічого не змінювати". Якщо все було зроблено вірно, на екрані монітора має виникнути додаткове графічне вікно (див. рис. 2.9). В ньому відображуються результати моделювання і наведені значення усіх використаних параметрів.
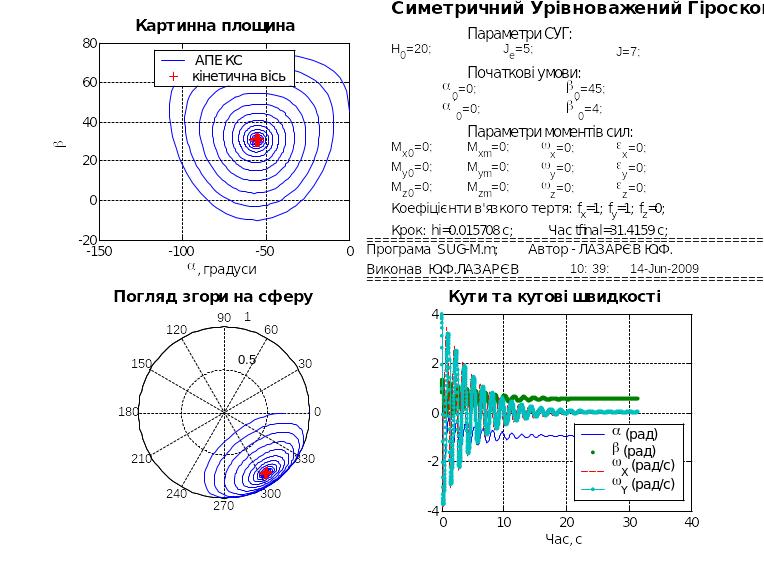
Рис. 2.9. Вигляд графічного вікна з результатами моделювання
6. Вимірювання необхідних параметрів руху здійснюється по графіках, наведених у цьому вікні. Для підвищення точності вимірювань слід використовувати функцію збільшення зображення Zoom in в лінійці інструментів на панелі цього вікна.
7. Результати вимірювань слід занотовувати у робочому зошиті у вигляді таблиці, одним з стовпців якої має бути змінюваний параметр, а іншими – виміряні значення і, можливо, розрахований за ними параметр.
2.1.7. Контрольні запитання
Що називають симетричним урівноваженим гіроскопом?
Що називають "кінетичною" віссю СЗГ? кінетичними осями?
Що саме розуміють під рухом гіроскопа?
Опишить вільний рух СЗГ. За якою формулою визначається частота вільних коливань? Чим визначається амплітуда цих коливань? Як називають ці коливання?
Чи підтверджуються ці теоретичні висновки проведеними вами експериментами? Якщо є розбіжності, то у чому ви вбачаєте їхню причину?
Опишить особливості руху СЗГ під дією сталого момента сил. За якими формулами визначаються амплітуда, частота нутаційних коливань, кутова швидкість прецесії? Від чого залежать ці параметри руху?
Чи підтверджуються ці теоретичні висновки проведеними вами експериментами? Якщо є розбіжності, то у чому ви вбачаєте їхню причину?
Опишіть вплив тертя на вільний і вимушений рух СЗГ. Чи справджуються теоретичні висновки у цьому випадку з результатами проведених експериментів? Якщо є розбіжності, то у чому ви вбачаєте їхню причину?
Яку чисельну модель СЗГ втілено у програмному забезпеченні цієї лабораторної роботи? Вкажить фрагменти програм, де це зроблено.