

11.Полная структурная схема моделирования с датчиками и им.
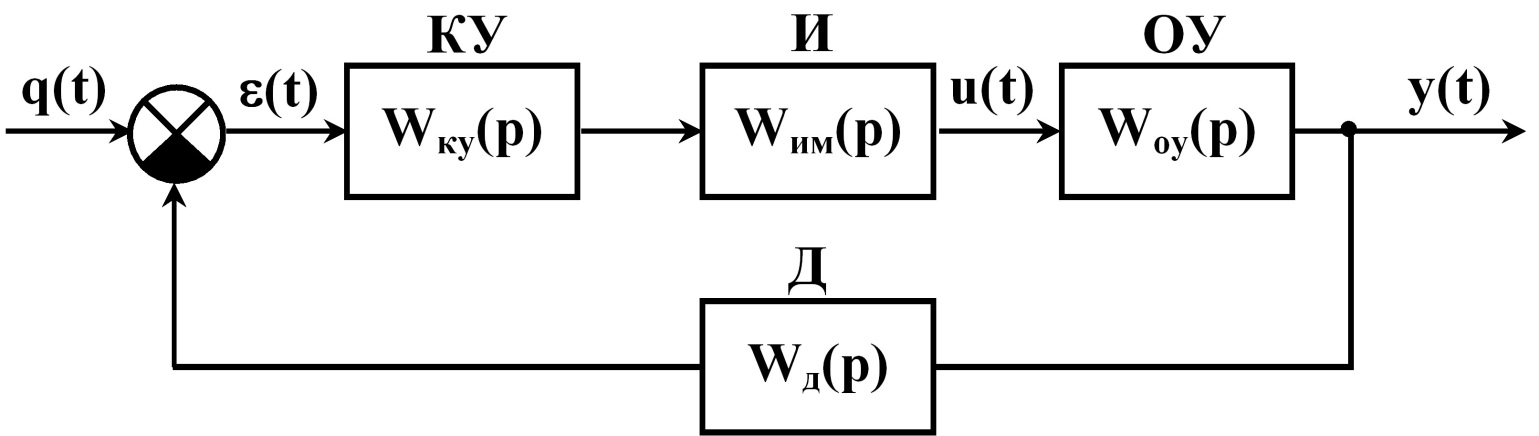
2.1Dd. Системы связного и несвязного регулирования. Полная структурная схема моделирования с датчиками и им.
Системы несвязанного регулирования. Структурная схема системы представлена на рис. 1.32. Выведем передаточную функцию эквивалентного объекта в одноконтурной АСР с регулятором Ri. Как видно из рис. 1.33, а, такой объект состоит из основного канала регулирования и связанной с ним параллельно сложной системы, включающей второй замкнутый контур регулирования и два перекрестных канала объекта.
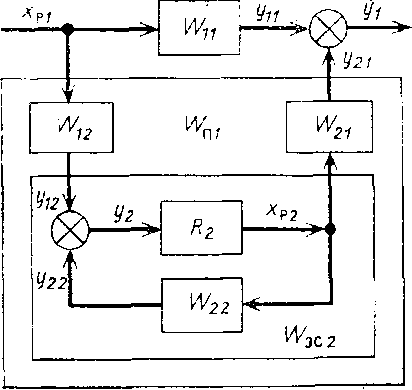
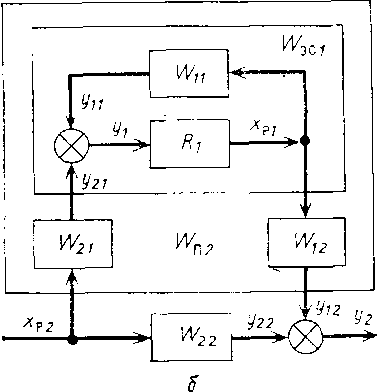
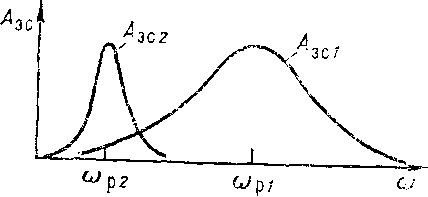
Рис. 1.33. Преобразование системы регулирования двух координат к эквивалентным одноконтурным АСР: —эквивалентный объект для первого регулятора; б—эквивалентный объект для второго регулятора
Рис. 1.34. Амплитудно-частотные характеристики одноконтурных АСР при отсутствии перекрестных связей в объекте
Передаточная функция эквивалентного объекта имеет вид:
![]()
Второе слагаемое в правой части уравнения (1.36) отражает влияние второго контура регулирования на рассматриваемую систему и по существу является корректирующей поправкой к передаточной функции прямого канала.
![]()
На основе формул (1.36) и (1.37) можно предположить, что если на какой-то частоте модуль корректирующей поправки будет пренебрежимо мал по сравнению с амплитудно-частотной характеристикой прямого канала, поведение эквивалентного объекта на этой частоте будет определяться прямым каналом.
Наиболее важно значение поправки на рабочей частоте каждого контура. В частности, если рабочие частоты двух контуров регулирования copi и сор2 существенно различны (например, o)pi»(0p2, как на рис. 1.34), то можно ожидать, что взаимное влияние их будет незначительным при условии
![]()
![]()
Наибольшую опасность представляет случай, когда инерционность прямых и перекрестных каналов приблизительно одинакова. Пусть, например, Wn(p) = Wiz(p) == W4i(p) = =W-2i(p)=W(p). Тогда для эквивалентных объектов при условии, что Ri(p) =Рз(р)'=К(р), получим:
передаточные функции
![]()
частотные характеристики
![]()
![]()
![]()
откуда W (((о) R (ко) =0,5; | R (to) | = 0,5/ | W (ко) [ .
Так, настройка П-регулятора, при которой система находится на границе устойчивости, вдвое меньше, чем в одноконтурной АСР.
Для
качественной оценки взаимного влияния
контуров регулирования используют
комплексный коэффициент связанности,
который обычно вычисляют на нулевой
частоте (т. е. в установившихся режимах)
и на рабочих частотах регуляторов copi
и сор2. В частности, при со=0 значение Лев
определяется
отношением
коэффициентов усиления по перекрестным
и основным каналам:
![]()
Если на этих частотах /Сев» 0, объект можно рассматривать как односвязпый; при Ясв>1 целесообразно поменять местами прямые и перекрестные каналы («перекрестное» регулирование); при 0< <1 расчет одноконтурных АСР необходимо вести по передаточным функциям эквивалентных объектов (1.36) и (1.37).
Билет №12а Взаимосвязанные системы регулирования. Системы связного регулирования. Автономные аср.
Системы связанного регулирования. Автономные АСР. Основой построения систем связанного регулирования является принцип автономности. Применительно к объекту с двумя входами и выходами понятие автономности означает взаимную независимость выходных координат г/i и ys при работе двух замкнутых систем регулирования.
По существу, условие автономности складывается из двух условий инвариантности: инвариантности первого выхода г/i по отношению к сигналу второго регулятора Хр2 и инвариантности второго выхода уч. по отношению к сигналу первого регулятора Хр1:
![]()
При этом сигнал Xpi можно рассматривать как возмущение для У 2, а сигнал Xps — как возмущение для у\. Тогда перекрестные каналы играют роль каналов возмущения (рис. 1.35). Для компенсации этих возмущений в систему регулирования вводят динамические устройства с передаточными функциями Ru(p) и К'д(р), сигналы от которых поступают на соответствующие каналы регулирования или на входы регуляторов.
По аналогии с инвариантными АСР передаточные функции компенсаторов Ri2(p) и Rsi(p), определяемые из условия автономности, будут зависеть от передаточных функций прямых и перекрестных каналов объекта и в соответствии с выражениями (1.20) и (1.20,а) будут равны:
![]()
![]()
![]()
![]()
Так же, как в инвариантных АСР, для построения автономных систем регулирования важную роль играет физическая реализуемость и техническая реализация приближенной автономности.
Условие приближенной автономности записывается для реальных компенсаторов с учетом рабочих частот соответствующих регуляторов:
![]()
![]()
![]()
![]()
В химической технологии одним из самых сложных многосвязных объектов является процесс ректификации. Даже в простейших случаях—при разделении бинарных смесей—в ректификационной колонне можно выделить несколько взаимосвязанных координат (рис. 1.36). Например, для регулирования процесса в нижней части колонны необходима стабилизация минимум двух технологических параметров, характеризующих материальный баланс по жидкой фазе и по одному из компонентов. Для этой цели обычно выбирают уровень жидкости в кубе и температуру под первой тарелкой, а в качестве регулирующих входных сигналов—расход греющего пара и отбор кубового продукта. Однако каждое из регулирующих воздействий влияет на оба выхода: при изменении расхода греющего пара изменяется интенсивность испарения кубового продукта, а вследствие этого—уровень жидкости и состав пара. Аналогично изменение отбора кубового продукта влияет не только на уровень в кубе, но и на флегмовое число, что приводит к изменению состава пара в нижней части колонны.
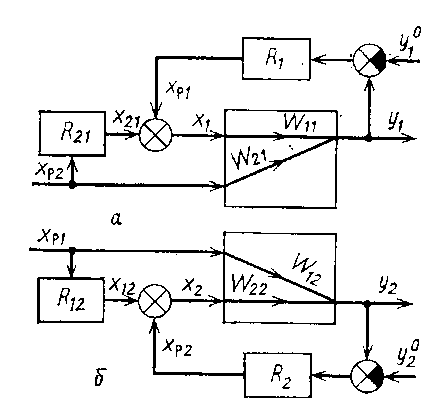
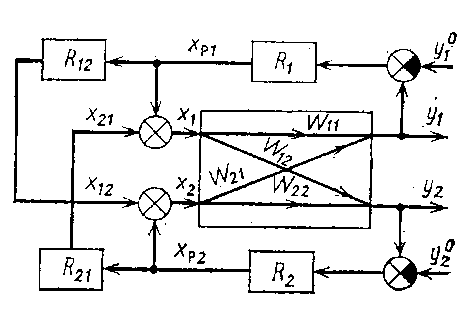
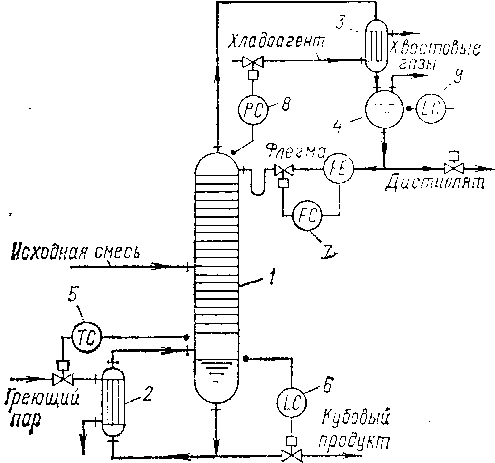
Рис. 1.35. Структурные схемы автономных АСР: а—компенсации воздействия от второго регулятора в первом контуре регулирования; б—компенсации воздействия от первого регулятора во втором контуре регулирования; в — автономной системы регулирования двух координат
Рис. 1.36. Пример системы регулирования объекта с несколькими входами и выходами:
1—ректификационная колонна; 2 — кипятильник; 3 — дефлегматор; 4—флегмовая емкость; 5— регулятор температуры; 6,9— регуляторы уровня; 7 — регулятор расхода; 8 — регулятор давления
Для регулирования процесса в верхней части в качестве выходных координат можно выбрать давление и температуру пара, а в качестве регулирующих входных параметров—подачу хладоагента в дефлегматор и флегмы на орошение колонны. Очевидно, обе входные координаты влияют на давление и температуру в колонне в ходе тепловых и массообменных процессов.
Наконец, рассматривая систему регулирования температуры одновременно в верхней и нижней частях колонны подачей соответственно флегмы и греющего пара, также получим систему несвязанного регулирования объекта с внутренними перекрестным