

1.2. Аналіз основних принципів організації та технічного забезпечення радіолокації
Залежно від галузі застосування радіолокації цілі можуть бути:
аеродинамічними (літаки, крилаті ракети);
балістичними і космічними (боєголовки, супутники);
наземними і надводними (танки, кораблі);
можливі цілі природного походження (хмари, планети) [1, 2, 12].
Сукупність відомостей про цілі, одержуваних засобами радіолокації, називають радіолокаційної інформацією.
Технічні засоби отримання радіолокаційної інформації називають радіолокаційними станціями (РЛС) або радіолокатори. Радіолокатори представляють собою складні комплекси, які крім радіотехнічних пристроїв можуть містити системи автоматики та обчислювальні пристрої.
Процес отримання радіолокаційної інформації, у багатьох випадках єдиний, зручно розділити на наступні етапи:
визначення цілей;
вимір координат і параметрів руху;
дозвіл;
розпізнавання цілей.
Виявлення полягає у прийнятті рішення про наявність або відсутність цілі в кожному виділеній ділянці простору з мінімально допустимими ймовірностями хибних рішень. Вимірювання зводиться до вироблення оцінок координат і параметрів руху цілі з мінімально допустимими похибками. При використанні сферичної системи координат, звичайно, виміряють дальність до цілі, а також її азимут (рис. 1.2). Як параметри руху цілі можуть вводитися похідні координат, або інші параметри траєкторії цілі [6].
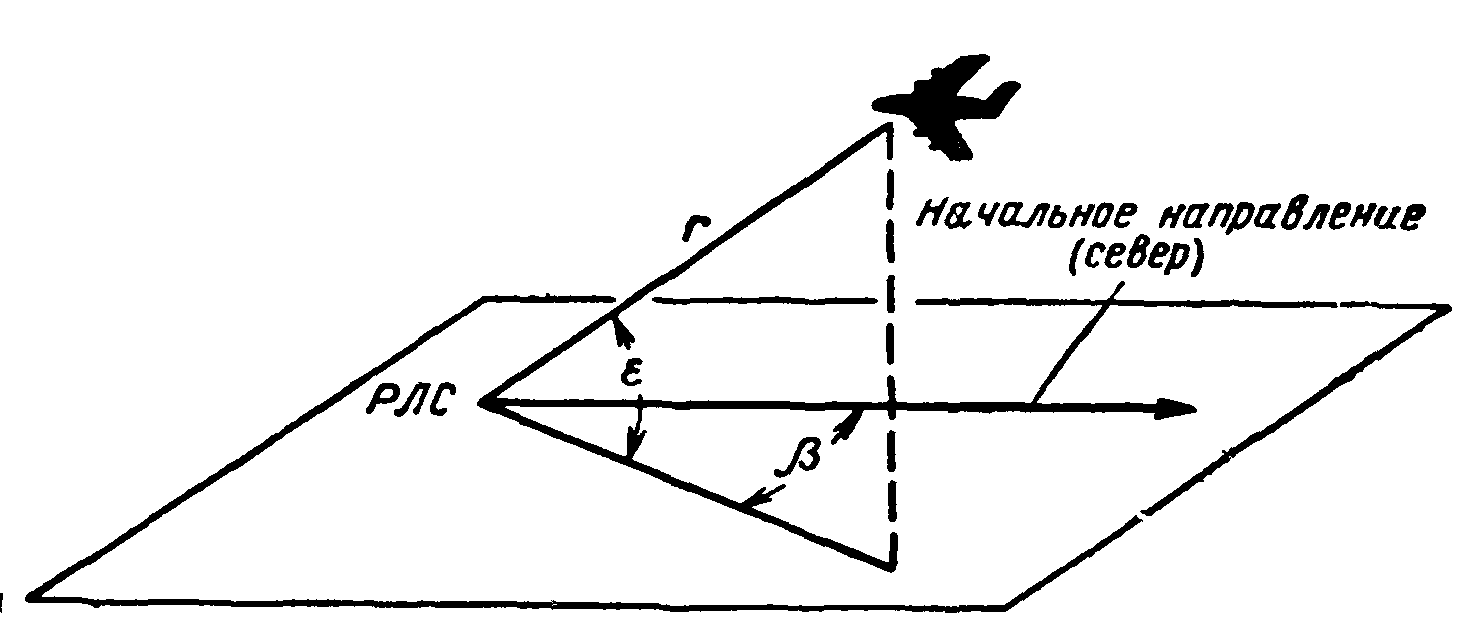
Рис. 1.2. Сферичні координати цілі
Д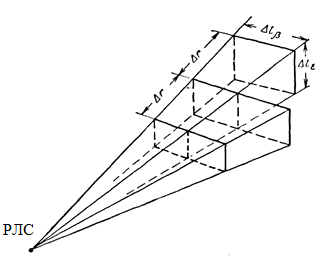 озвіл
полягає у виконанні завдань виявлення
і вимірюванні параметрів довільної
цілі при наявності інших, крім вибраної
для спостереження цілі. Кажуть про
дозвіл цілей по дальності, кутових
координатах, швидкості і т. д. роздільну
спосібність за координатами характеризують
елементарним об'ємом. Розміри останнього
по дальності - r
,
в азимутальної площині -
і в кутомірної -
(рис. 1.3) встановлюються так, що на
відмінність цілі в сусідньому обсязі
практично не погіршує показників якості
виявлення і вимірювання координат цілі,
яка розташована в центрі виділеного
обсягу. Виділений таким образом
елементарний об'єм називають вирішальним
об’ємом (при імпульсному опроміненні
цілі
імпульсним об'ємом) [5 - 8, 13].
озвіл
полягає у виконанні завдань виявлення
і вимірюванні параметрів довільної
цілі при наявності інших, крім вибраної
для спостереження цілі. Кажуть про
дозвіл цілей по дальності, кутових
координатах, швидкості і т. д. роздільну
спосібність за координатами характеризують
елементарним об'ємом. Розміри останнього
по дальності - r
,
в азимутальної площині -
і в кутомірної -
(рис. 1.3) встановлюються так, що на
відмінність цілі в сусідньому обсязі
практично не погіршує показників якості
виявлення і вимірювання координат цілі,
яка розташована в центрі виділеного
обсягу. Виділений таким образом
елементарний об'єм називають вирішальним
об’ємом (при імпульсному опроміненні
цілі
імпульсним об'ємом) [5 - 8, 13].
Рис. 1.3. Пояснення вирішального обема и виришальної здібності по елементарному обему
Розпізнавання полягає у встановленні приналежності дозволеної цілі до певного класу. В одних випадках необхідно встановити приналежність «свій - чужий» за допомогою запитання-відповідь пристроїв радіолокаційного розпізнавання, в інших - розпізнати боєголовку балістичної ракети на тлі її корпусу, хибних цілей, метеорних слідів і т. п. або визначити характер штучного супутника Землі за допомогою спеціальної апаратури селекції.
Швидкоплинність і складність радіолокаційної обстановки потребують, як правило, високого темпу видачі даних, що утворюють потоки з великим обсягом інформації. Тому кожна з завдань: виявлення, вимірювання, дозвіл і розпізнавання, для будь-якого кінцевого об'єму простору повинна вирішуватися за обмежений час.
До засобів вироблення радіолокаційної інформації пред’являється вимога високої перешкодозахищеності по відношенню до природних і штучних перешкод. Створення штучних перешкод - один з важливих способів протидії з боку противника системам радіолокації. Ці перешкоди створюються, наприклад, у вигляді випромінювань що заважають (активні перешкоди) або заважають відбитий (пасивні перешкоди), які маскують корисні сигнали або імітують цілі.
Перешкодозахищеність це здатність радіолокатора підтримувати на заданому рівні показники якості виявлення, вимірювання (або розпізнавання) при наявності перешкод, а також спосібність використовувати самі перешкоди як джерело інформації.
Термін «радіолокація» утворений із двох латинських слів: «locus» - місце, і «radio» - випромінювання. Перше слово коротко характеризує одну з основних завдань радіолокації, друге – указує спосіб її вирішення, заснований на використанні радіохвиль.
Роздільна здатність РЛС - можливість роздільно спостерігати і вимірювати координати й параметри руху близько розташованих цілій. Виділимо в зоні огляду чотири сусідніх елементарних обсягів, в кожному з яких знаходиться одна точкова ціль. Припустимо, що одні елементи мають однакові кутові координати, але відрізняються по дальності, інші елементи відрізняються тільки по азимуту, треті елементи - тільки по куту міста, причому, всі цілі спостерігаються роздільно. Будемо скорочувати кожну з величин різниць до тих пір, поки роздільне спостереження цілей стане неможливим. Тоді обсяг V0 і буде вирішуються обсягом і по його складових оцінюється раз-вирішальна спроможність станції по дальності, азимуту і по куту місця.
Роздільна здатність по дальності оцінюється мінімальною відстанню між двома знаходяться на одному направленні цілі, при якому ці цілі спостерігаються роздільно.
Роздільна здатність по азимуту оцінюється мінімальної різницею азимутів двох цілей з однаковими дальністю і кутом місця, при якій ці цілі ще спостерігаються роздільно.
Роздільна здатність по куту місця оцінюється мінімальної різницею кутів місця двох цілей з однаковими дальністю і азимутом, при якій ці цілі, ще спостерігаються роздільно.
Роздільна здатність по швидкості оцінюється мінімальної різницею радіальних швидкостей двох цілей з однаковими координатами, при якій ці цілі ще спостерігаються роздільно. В принципі достатньо дозволу цілей по одній координаті або по швидкості.
Розглянемо поняття помилок вимірювання координат і параметрів руху [1 - 5, 8, 16]. Помилки вимірювання поділяються на грубі, систематичні і випадкові. Грубі помилки - це результат грубого прорахунку оператора або наслідок несправності, що виникла в апаратурі. Такі похибки значно більше за інших помилок в даному ряду вимірів, і тому вони легко виявляються. Систематичні помилки викликаються довго діючими факторами, наприклад, затримкою сигналу в ланцюгах РЛС або недосконалості методу вимірювань. Такі помилки в тій чи іншій мірі компенсація калібруванням апаратури. Випадкові помилки залежать від випадкових обставин, які не піддаються попередньою обліку.
Крім зазначених вище термінів в дипломній роботі будуть потрібні і деякі інші визначення і поняття. Зазначимо їх. Перешкодозахищеність РЛС складається з завадостійкості і скритності. Завадостійкість здатність станції протистояти зовнішніх перешкод, створюваним противником. Завадостійкість тим вище, чим менше зовнішні перешкоди знижують максимальну дальність дії РЛС. Скритність роботи РЛС - здатність станції протистояти радіолокаційної розвідки, яку робить противник для виявлення параметрів випромінювання пригнічуваної РЛС. Ці дані необхідні для постановці ефективних перешкод противнику. Надійність - це здатність РЛС працювати протягом часу зі збереженням усіх заданих експлуатаційних параметрів.
Ступінь автоматизації знімання та обробки інформації. Радіолокаційні сигнали піддаються обробці в приймальному і вихідному пристроях РЛС. Призначення обробки - відокремити сигнали від перешкод і витягти з сигналів максимум корисної інформації про цілі.
Якщо одержувачем інформації є оператор РЛС, то вихідним пристроєм станції служить індикатор, звичайно електронно-променевого типу, В цьому випадку обробка інформації напівавтоматична, оскільки в ній бере участь людина. Якщо ж отримувач інформації - обчислювальний пристрій, то з'їм та обробка інформації повністю автоматизуються.
Технічні дані системи радіолокаційного огляду простору. Ця система поелементно опромінює зону огляду РЛС для виявлення наявних в зоні цілей і вимірювання їх координат і параметрів руху. Поширення радіохвиль по дальності відбувається природним шляхом і практично миттєво - зі швидкістю світла. Основна складність полягає в огляді по кутових координатах: антена формує діаграму спрямованості у вигляді одного або декількох променів. Кожен із променів охоплює тілесний кут одного елемента зони огляду, певним способом повідомляє діаграмі спрямованості переміщення за таким законом, щоб за один цикл опромінити всю зону. Тривалість цього циклу називаються періодом огляду Тоб.
Методи огляду поділяють на однопроменеві і багатопроменеві, паралельні та послідовні.
Миттєвий огляд одним нерухомим променем застосовують у РЛС, що вимірюють тільки дальність і, отже, не потребують скануванні променя. Наприклад, в літакових радіовисотомір і далекомірах. Миттєвий огляд можливий і при вимірюванні кутових координат, але для цього діаграма спрямованості антени РЛС повинна бути багатопроменевої і відразу охоплювати всю зону огляду станції. Такий миттєвий багатопроменевої огляд інакше називається паралельним.
Однопроменевий огляд зі скануванням називають послідовним, так як він вимагає послідовного опромінення всіх елементів зони. Є різновиди послідовного огляду.
Якщо з двох кутових координат вимірюють одну, як, наприклад, у так званих панорамних РЛС, то променю антени надають більшу ширину в площині не вимірюваної кутової координати для того, щоб за один оборот (одне хитання) антени перекривалася вся зона огляду . Такий огляд називається круговим, або секторним.
При цьому бувають два типи діаграм спрямованості (ДН): діаграма, що стиснута в горизонтальній площині, і діаграма, стиснута у вертикальній площині. Перша призначена для РЛС, що вимірює дальність та азимут, а друга - для РЛС, що вимірює кут місця або висоту мети. Огляд починається з кругового обертання першої антени навколо вертикальної осі, наступний етап це дистанційний розворот другої антени на виявлений азимут цікавить мети і останній етап - хитання цієї антени навколо горизонтальної осі з одночасним вимірюванням кута місця або висоти цілі.
Якщо для точного вимірювання обох кутових координат застосовується однопроменевий огляд, то сканування відбувається голчастим променем по гвинтовій лінії, спіралі, зигзагоподібне або по іншій складної траєкторії. При цьому період огляду, природно, більше, ніж при круговому або секторному обертанні плоского променя.