

3.2. Розробка основних алгоритмів розрахунків просторових характеристик об'єктів у радіолокаційних комплексах
Алгоритми розрахунків просторових характеристик в області навігації й радіолокації ґрунтуються на визначенні геометричних характеристик фігур у гіперпросторі факторів [5, 13, 27]. До таких фігур ставляться куб, куля, піраміда й інші.
Побудова куба не викликає особливих утруднень, якщо є функція для побудови в просторі трикутника по трьом заданим точкам. Кожна квадратна грань куба може бути представлено у вигляді двох трикутників, що доповнюють. Таким чином, для побудови куба знадобиться відобразити в просторі 12 трикутників.
Побудова сфери й піраміди вимагає додаткових зусиль. Сферу будемо спрощено відображати у вигляді набору чотирикутників, кожний з яких будується так само, як і грані куба – із двох взаємодоповнюючих трикутників. Чотирикутники утворюються, якщо розбити поверхня сфери паралелями й меридіанами. Простір між паралелями назвемо шаром, а простір між меридіанами – часток (рис. 3.3).
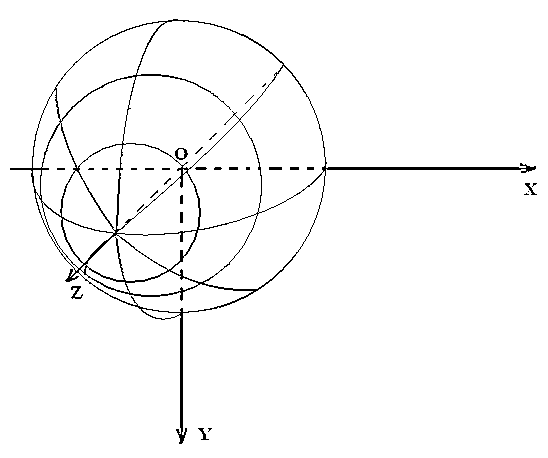
Рис. 3.3. Методи побудови сфери чотирикутниками
Кількість паралелей і меридіанів буде визначати якість відображення сферичної поверхні – чому їх більше, тем вище якість. Однак, при цьому потрібно більше часу на відображення сфери. Тому для цього класу можна передбачити можливість обчислювати координати вершин і нормалей заздалегідь, а потім багаторазово використовувати ці координати в процесі рис.вання. Нижче наведена блок-схема алгоритму обчислення координат вершин сфери (рис. 3.4). Для зберігання координат вершин використовується двовимірний масив Vert[i][j], а для зберігання нормалей – Norm[i][j].
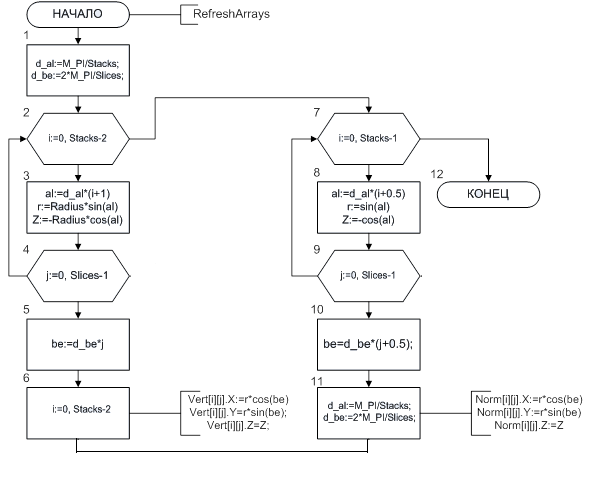
Рис. 3.4. Обчислення вершин і нормалей сфери
Піраміда будується аналогічно, але масиви Vert і Norm одномірні, тому що в правильній піраміді вісь обертання одна (рис. 3.5).
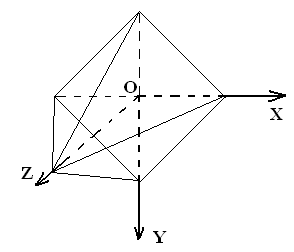
Рис. 3.5. Побудова радіолокаційної піраміди
На рис. 3.6. показана блок-схема алгоритму розрахунків координат вершин основи (Vert) і нормалей бічних поверхонь (Norm) піраміди.
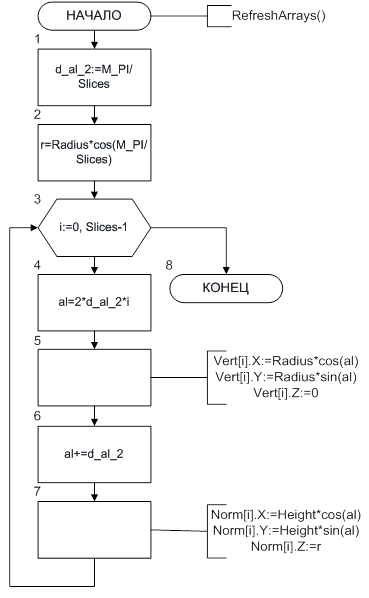
Рис. 3.6. Обчислення вершин і нормалей правильної піраміди
Тепер розглянемо аналітичні засоби обчислення й перетворення гіперфігур, що характеризують положення об'ємного об'єкта в просторі при його виявленні засобами радіолокації.
Н![]()
![]() ехай
– матриця виду
до перетворення, а – матриця виду
після переміщення. Тоді для перетворення
системи координат необхідно зробити
добуток
матриці переміщення
ехай
– матриця виду
до перетворення, а – матриця виду
після переміщення. Тоді для перетворення
системи координат необхідно зробити
добуток
матриці переміщення
![]() на матрицю
на матрицю
![]() :
:
 (3.4)
(3.4)

Н![]()
![]() ехай
– матриця виду
до масштабування, а – матриця виду
після масштабування. Тоді для масштабування
системи координат необхідно зробити
добуток
матриці масштабування
ехай
– матриця виду
до масштабування, а – матриця виду
після масштабування. Тоді для масштабування
системи координат необхідно зробити
добуток
матриці масштабування
![]() на матрицю
:
на матрицю
:
 (3.5)
(3.5)
Р![]() озглянемо
поворот навколо довільної осі. Нехай
вектор
це вектор,
що
задає вісь, навколо якої потрібно зробити
поворот. Нехай
озглянемо
поворот навколо довільної осі. Нехай
вектор
це вектор,
що
задає вісь, навколо якої потрібно зробити
поворот. Нехай
![]() – проекція вектора
на площину yoz (рис. 3.7).
– проекція вектора
на площину yoz (рис. 3.7).
![]()
Рис. 3.7. Перший етап повороту навколо довільної осі
Якщо![]() ,
то вектор
практично належить осі Ox і поворот щодо
вектора
,
то вектор
практично належить осі Ox і поворот щодо
вектора
![]() збігається з поворотом щодо осі Ox. А
якщо ні, то виконується така послідовність
дій:
збігається з поворотом щодо осі Ox. А
якщо ні, то виконується така послідовність
дій:
поворот навколо осі Ox на деякий кут
 - матриця повороту
- матриця повороту ,-
після якого вектор
буде належати площині xoy;
,-
після якого вектор
буде належати площині xoy;поворот навколо осі Oz на деякий кут
 ,
після чого вектор
буде належати осі Ox (матриця повороту
,
після чого вектор
буде належати осі Ox (матриця повороту
 );
);поворот навколо осі Ox на заданий кут
 (матриця повороту
(матриця повороту
 );
);поворот навколо осі Oz на кут
 (матриця повороту
(матриця повороту
 );
);поворот навколо осі Ox на кут
 ,
після чого вектор
ухвалює колишнє положення (матриця
повороту
,
після чого вектор
ухвалює колишнє положення (матриця
повороту
 ).
).
Після зазначених дій виконується другий етап повороту, як показано на рис. 3.8.
![]()
![]()
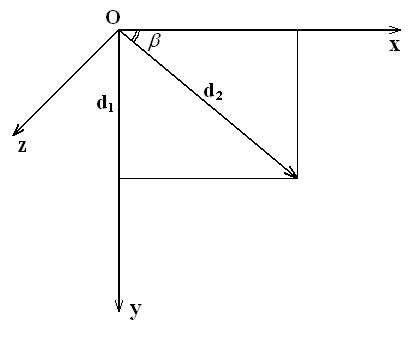
Рис. 3.8. Другий етап повороту
У матричному виді другий етап повороту буде мати вигляд (3.6)
 (3.6)
(3.6)
Нехай
![]() – довжина вектора
(
– довжина вектора
(![]() ),
тоді
),
тоді
![]()
![]()
Щоб поворот здійснювався за правилом буравчика ( за годинниковою стрілкою, якщо дивитися уздовж осі Ox), необхідно виконувати його паралельно в площині yoz не на кут , а на кут (3.7)
![]()
 (3.7)
(3.7)
Наведені аналітичні вираження добре алгоритмизируются, що дозволяє розробляти на їхній основі програмні модулі розрахунків характеристик як точкових, так і об'ємних об'єктів, що рухаються. У дипломній роботі ( як приклад) використаний найпростіший випадок перетворення положення об'єкта в прямокутних координатах і горизонтальна проекція об'єкта на площину XOY.