

3.1. Розробка методів реєстрації, розрахунків і керування числовими характеристиками місця розташування об'єктів
Для розв'язку основної навігаційної задачі, насамперед, необхідно мати інформацію про координати в земній навігаційній системі координат (СК), обраної для виконання польоту. Вказівка положення об'єктів і точок на земній поверхні залежно від прийнятої форми Землі здійснюється в астрономічній, геодезичній і сферичної системах координат [14]. На практиці широко користуються терміном географічні координати (широта й довгота), хоча такий СК немає. Під географічною системою координат розуміють ортогональну сітку меридіанів і паралелей на поверхні земного еліпсоїда обертання, перенесену на карту. Тому зняті з карти координати точок називаються географічними.
При розв'язку багатьох задач повітряної навігації Землю ухвалюють за сферу (куля) і користуються нормальної сферичної СК. Перетворення географічних координат у нормальні сферичні координати виконують у такий спосіб.
Якщо радіус Землі Rз = 6371,1 км (сфера, рівновелика за обсягом сфероиду Красовского), то на сфері будуть мати місце викривлення по куту порядку 0,4° і по відстані 0,5%. У другому випадку вони відповідно не перевищують 0,1° і 0,08%. У сучасній навігації магістральних літаків перетворення координат здійснюється.
Застосування різних датчиків навігаційної інформації, робота яких заснована на найрізноманітніших фізичних принципах, а також велика кількість навігаційних задач, розв'язуваних у процесі підготовки до польоту й у польоті, обумовлюють використання в повітряній навігації значного числа земних систем координат: географічної, нормальної сферичної, ортосферической, головної й приватної ортодромической, плоскої прямокутної, полярної й біполярної, екваторіальної, горизонтальної й ін.
Для розв'язку всіх навігаційних задач вихідною інформацією є географічні координати, які при необхідності перетворяться в будь-які інші. На рис. 3.1 показаний метод послідовних зарубок і формування характеристик географічних оцінок.
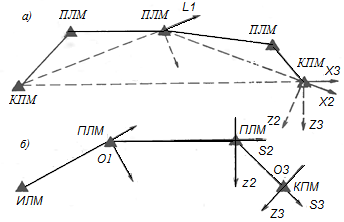
Рис. 3.1. Метод тріангуляції для формування навігаційних пунктів
Ортодромическая сферична СК (ОССК) являє собою косу сферичну систему, екватор якої розташовується в будь-якому необхідному напрямку й називається головної ортодромией (умовним екватором). Равноудаленные від неї дві точки, у яких сходяться умовні заходи, ухвалюються за полюсы Ро цієї СК. Координатами точки є ортодромические широта й довгота. Широта L виміряється від площини умовного екватора до полюсів системи від 0 до ±90° Початок відліку довготи А може бути обране довільно, якщо воно не визначається особливостями бортового навігаційного комплексу.
В основу виміру координат радіотехнічними методами покладена сталість вектора швидкості електромагнітних хвиль, що поширюються в одноріднім середовищі, тобто сталість швидкості З =3*108 м/с, і прямолінійність поширення хвиль [12 - 14].
Вимір
дальності проводиться
з однієї
точки
простору й у беззапитальних системах
засноване на тому,
що час
поширення
![]() сигналу
від мети
до точки
приймання
пропорційно пройденому шляху
R (рис. 3.2)
сигналу
від мети
до точки
приймання
пропорційно пройденому шляху
R (рис. 3.2)

Рис. 3.2. Принципи виміру дальності (а) і напрямку (різниці дальностей) (б)
Це твердження можна виражається формулою (3.1)
![]() .
(3.1)
.
(3.1)
Щоб виміряти цей час, у пункті приймання необхідно точно знати момент випромінювання сигналу метою, тобто мати опорний сигнал, погоджений за часом з випромінюваним. Для цього в точках випромінювання й приймання потрібно розташовувати высокостабильнымb еталонами коливань — годинником, що йшов строго синхронно й синфазно. Будь-яка як завгодно мала розбіжність частот двох еталонів із часом приводить до розбіжності їх по фазі, тобто за часом, у результаті чого через досить більші інтервали після звірення годин правильний відлік часу запізнювання сигналу стає неможливим. Через цей реалізація беззапитального методу виміру дальності пов'язана з більшими технічними труднощами.
Математичні методи обробки навігаційної інформації ґрунтуються на використанні результатів теорії ймовірностей, математичної статистики й теорії статистичного оцінювання. Алгоритми обробки інформації, засновані на тих самих математичних методах, можуть бути реалізовані за допомогою різних технічних засобів — аналогових обчислювальних машин, бортових цифрових обчислювальних машин, а деякі виконані безпосередньо людиною (навігатором). Цифрові ЕОМ у стані реалізувати практично будь-які алгоритми обробки, якщо вони не вимагають надмірно великого об'єму пам'яті й швидкодії. Навігаційні обчислювачі аналогового типу мають суттєво більш низьку точність і швидкодію, у них утруднена реалізація логічних операції й організація пам'яті. Безпосередньо людині (навігаторові) під силу здійснити в прийнятний час тільки найпростіші обчислювальні операції, але зате він порівняно легко перевіряє логічні умови.
Сутність комплексної обробки інформації в спрощеному виді. Нехай є n датчиків навігаційної інформації (однотипних або працюючих на різних принципах), що вимірюють той самий навігаційний параметр в. Кожний датчик має свою погрішність виміру (, внаслідок чого обмірювані значення (, i = 1, n відрізняються від фактичних, як показано у вираженні (3.2):
![]() (3.2)
(3.2)
Задача комплексної обробки інформації — одержання такої оцінки у вимірюваного параметра, яке було б найбільше близько в деякому змісті до фактичного значення параметра в. Сукупність операцій, які необхідно проробити над відомими значеннями для одержання результату, називається алгоритмом оцінювання (3.3)
![]() (3.3)
(3.3)
Для того щоб однозначно визначити алгоритм A, необхідно задати клас припустимих алгоритмів, зробити допущення про характер погрішностей (закон розподілу, значення СКП) і вибрати захід близькості оцінки Y до фактичного значення в (критерій оцінювання). Звичайно припускають, що А и Y є випадковими величинами з математичним очікуванням, рівним нулю, оскільки при відомих систематичних погрішностях вони можуть бути усунуті або враховані. Також іноді допускають, що Y має нормальний закон розподілу.
Внаслідок випадкового характеру A0 оцінка Y також є випадковою. Тому в якості критерію точності оцінювання ухвалюють математичне очікування якої-небудь функції від погрішності оцінювання в=уi - Y.
Найбільше часто вибирають у якості критеріїв оцінювання математичне очікування квадрата або модуля Y. Іноді в якості критерію використовується ймовірність того, що погрішність (Y не перевершить деякого припустимого значення.
Резервування — це найпростіший спосіб комплексної обробки інформації. При цьому оцінкою Y служить вимір уi, отримане за допомогою основного датчика навігаційної інформації (більш точного). При його відмові використовується резервний датчик. При такому способі точність ц не вище точності основного датчика, але підвищується надійність системи. Резервування датчиків ефективно бреши достатній глибині їх контролю, коли будь-яка відмова відразу автоматично виявляється.
Для виявлення неявних відмов використовується порівняння значень параметрів, обмірюваних різними датчиками. При цьому двох датчиків дли виявлення, що відмовило засобу недостатньо, оскільки при розбіжності обмірюваних ними значень навігаційного параметра залишається невідомим, який з них відмовив. При використанні такого способу застосовують як мінімум три датчики. Надійність виявлення відмови залежить від обраного значення допуску на розбіжність вимірів.