

4.3.5. Вплив сил опору на вільні коливання системи. Згасаючі коливання
Диференціальне рівняння згасаючих коливань системи з одним степенем вільності має вигляд
![]() .
(4.132)
.
(4.132)
Позначимо
![]() .
.
Тоді (4.132) запишеться
![]() .
(4.133)
.
(4.133)
Розв’язок рівняння (4.133) розглянутий у § 3.1.2 і має вигляд
![]() .
(4.134)
.
(4.134)
Детальне дослідження цього виду коливань, визначення періоду, декремента коливань, обчислення сталих інтегрування зроблено в § 3.1.2. Тому звернемо увагу лише на побудову фазової діаграми згасаючих коливань. Для цього скористаємося розв’язком (4.134). Похідна від цього виразу
![]() ,
(4.135)
,
(4.135)
де
![]() .
.
Позначимо
![]() .
.
Якщо
обрати
![]() ,
то з (4.135)
,
то з (4.135)
![]() .
(4.136)
.
(4.136)
Перейдемо до полярних координат
![]() (4.137)
(4.137)
Із виразів (4.136)
![]() (4.138)
(4.138)
Виключивши з рівнянь (4.138) час , дістанемо
![]() ,
(4.139)
,
(4.139)
де
![]() .
.
Вираз (4.139) визначає сім’ю логарифмічних спіралей (рис. 4.21). Точку О називають фокусом, вона відповідає положенню стійкої рівноваги. За будь-яких початкових умов зображуюча точка наближається до точки О. Точку О називають стійким фокусом.

Рисунок 4.21
4.3.6. Вимушені коливання системи. Вплив сил опору на вимушені коливання
Розглянемо одночасний вплив на систему збурювальної сили і сили опору, тобто в рівнянні коливань збережемо всі члени:
![]() .
(4.140)
.
(4.140)
У
загальному випадку сила
– довільна функція часу,
![]() .
Найпоширенішим випадком руху є рух під
дією гармонічного збурення, тому
вважатимемо
.
Найпоширенішим випадком руху є рух під
дією гармонічного збурення, тому
вважатимемо
![]() .
(4.141)
.
(4.141)
Тоді (4.140) матиме вигляд:
![]() ,
(4.142)
,
(4.142)
звідки після очевидних перетворень дістанемо
![]() ,
(4.143)
,
(4.143)
де
![]() .
(4.144)
.
(4.144)
Проінтегруємо рівняння (4.143), користуючись правилами інтегрування лінійних неоднорідних рівнянь. Загальний інтеграл рівняння (4.143) є сумою загального інтеграла відповідного однорідного рівняння, який визначається формулою (4.134), і частинного інтеграла неоднорідного рівняння (4.143). Частинний інтеграл визначатимемо методом неозначених коефіцієнтів. Покладемо:
![]() .
(4.145)
.
(4.145)
Підставимо (4.145) до (4.143) і визначимо і з умови, що (4.145) задовольняє рівняння (4.143):
![]() (4.146)
(4.146)
З цієї системи рівнянь дістанемо
 (4.147)
(4.147)
Для полегшення дальшого дослідження перетворимо (4.147), взявши
![]() (4.148)
(4.148)
Тоді частинний розв’язок (4.145) має вигляд
![]() ,
(4.149)
,
(4.149)
а загальний розв’язок
![]() .
(4.150)
.
(4.150)
Як
видно з (4.150), перший доданок у правій
частині цього виразу визначає згасаючі
коливання з частотою
![]() (рис. 4.22), які завдяки співмножникові
(рис. 4.22), які завдяки співмножникові
![]() досить швидко стають практично
неістотними. Вирішальне значення має
рух, що відповідає другому доданку,
тобто виразу (4.149). Його називають
стаціонарним.
досить швидко стають практично
неістотними. Вирішальне значення має
рух, що відповідає другому доданку,
тобто виразу (4.149). Його називають
стаціонарним.
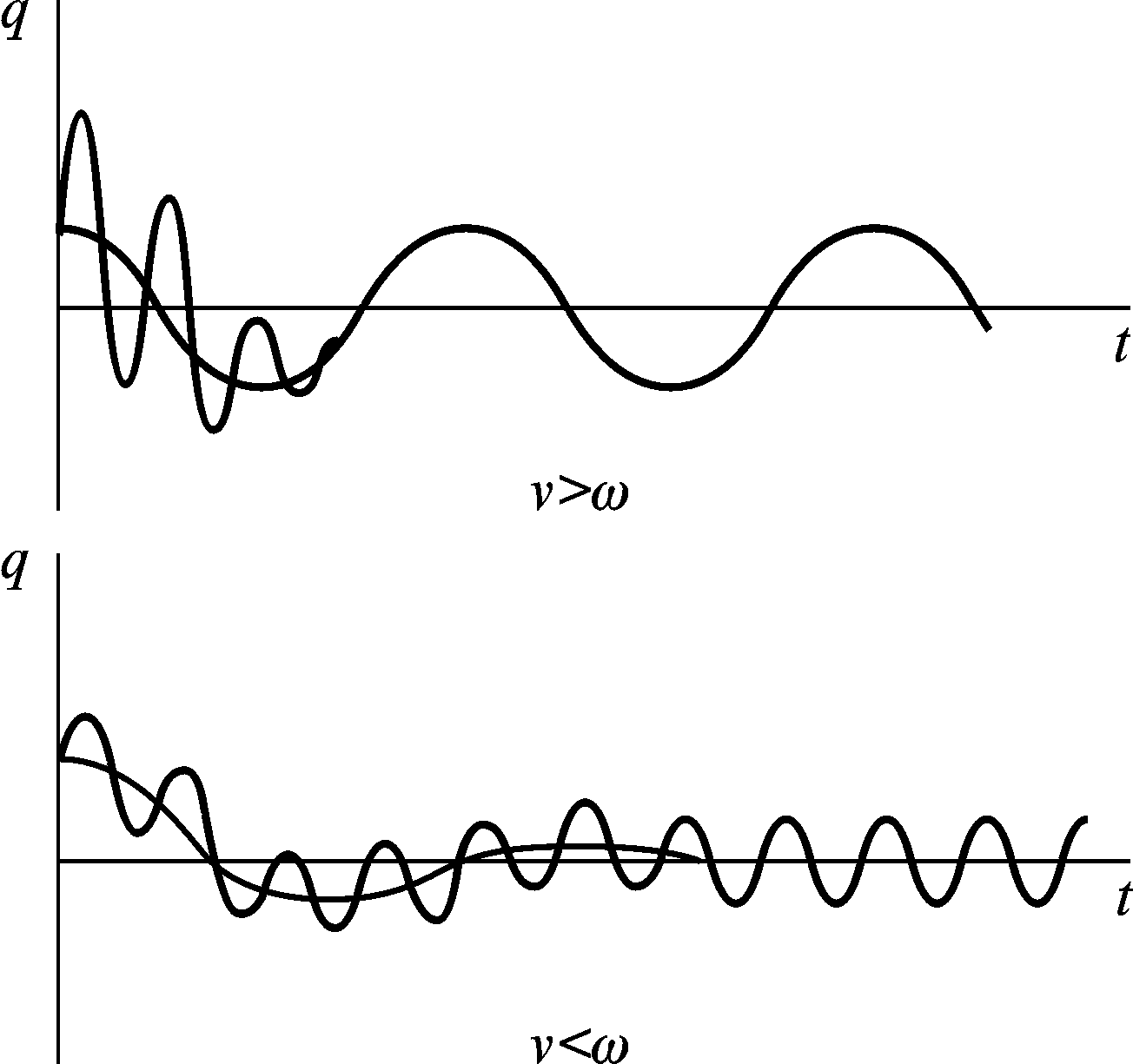
Рисунок 4.22
Таблиця 4. 4
№ бло- ку |
Текст програми |
Пояснення |
1 |
2 |
3 |
1. |
> restart: |
Перезапуск програми |
2. |
> read "mechan_sistema.m"; |
Підключення пакету зображення об’єктів, змодельованого авторами посібника |
3. |
> with(plots): > with(plottools): |
Підключення графічних пакетів |
4. |
Геометричні розміри повзуна, нитки і стіни > H :=.1: L :=.2: > l:=.5: Sft:=.5: > l:='l': t:='t': |
Завдання
–
довжина
нитки,
Привласнити змінним: довжину нитки і час |
5. |
display(механізм(0.5,Pi/6), scaling=constrained,axes=NONE); |
Зображення еліптичного маятника на дисплеї комп’ютера |
6. |
Кінетична енергія > T1:=v->M*(v)^2/2: > T2:=(v,omega,phi)->m*((l* cos(phi)*omega+v)^2+(l*sin(phi)* omega)^2)/2: > T:=(v,omega,phi)->T1(v)+ T2(v,omega, phi): |
Кінетична енергія: повзуна:
кульки:
еліптичного маятника:
|
Продовження табл. 4. 4
1 |
2 |
3 |
7. |
Потенціальна енергія
> V1:=x->k*x^2/2:
> V2:=phi->m*g*l*(1-cos(phi)):
> V:=(x,phi)->V1(x)+V2(phi): |
Потенціальна енергія: сили
пружності:
сили ваги кульки:
еліптичного маятника:
|
8. |
Функція Лагранжа > Lagrange:=(v,omega,x,phi)->T(V, omega, phi)-V(x,phi): > Lg:=Lagrange(v,omega,x,phi): |
лагранжіан
|
9. |
Заміна змінних > for s in x,phi,v,omega do A[s]:=subs([x=x(t),phi=phi(t), v=diff(x(t),t),omega=diff(phi(t),t)], diff(Lg,s)); end do: |
Вводимо
функції
|
Продовження табл. 4. 4
1 |
2 |
3 |
10. |
Система рівнянь Лагранжа ІІ роду > Eq1:=diff(A[v],t)-A[x]=0:
> Eq2:=diff(A[omega],t)-A[phi]=0:
> Eq2:=simplify(Eq2): > for i from 1 to 2 do Eq||i:= subs(sin(phi(t))=phi(t), cos(phi(t))=1, diff(phi(t),t)^2=0, Eq||i); end do: > for i from 1 to 2 do Eq||i||new:=subs(x(t)=y(t)-l*phi(t), Eq||i); end do: > Eq1new:=simplify(%%): > Eq2new:=simplify(%%): > Eqn:=subs(phi(t)=solve(Eq2new, phi(t)), Eq1new): |
Рівняння Лагранжа ІІ роду:
Спрощуємо друге рівняння системи. Так як коливання малі, замінюємо:
Спрощуємо обидва рівняння
Підставляємо
в перше рівняння
|
11. |
Розв’язання рівнянь Лагранжа > Eqn_f:=simplify(subs(y(t)= exp(I*sqrt(lambda)*t), Eqn)*g/exp(I*sqrt(lambda)*t)): |
Характеристичне рівняння Вводимо
функцію Ейлера
|
Продовження табл. 4. 4
1 |
2 |
3 |
12. |
> Om:=solve(Eqn_f,lambda): |
Корені характеристичного рівняння |
13. |
Параметри еліптичного маятника > M:=1: m:=.1: l:=.5: k:=10: g:=9.8: |
Параметри еліптичного маятника: маси – повзуна і – кульки;
|
14. |
> Omega:=<sqrt(Om[1])| sqrt(Om[2]): > printf("%9.2f,%9.2f\n", Omega[1], Omega[2]): Власні частоти коливань системи в рад/сек 4.80, 2.92 |
Власні частоти коливань еліптичного маятника
|
Продовження табл. 4. 4
1 |
2 |
3 |
|||
15. |
Розв’язок рівнянь Лагранжа ІІ роду в чисельному вигляді > evalf(dsolve({Eq1,Eq2, x(0)=0.2, phi(0)=Pi/24,
D(x)(0)=0, D(phi)(0)=0},{x(t),phi(t)})): > X:=rhs(%[1]);Phi:=rhs(%%[2]); Закони руху еліптичного маятника |
Закони руху еліптичного маятника Чисельний розв’язок рівнянь Лагранжа за по- чаткових умов: відхилення:
повзуна
швидкості:
повзуна
Праві частини рівнянь |
|||
|
Закони руху еліптичного маятника |
|
|||
|
|
||||
|
|
||||
|
|
||||
16. |
Динаміка еліптичного маятника > for i from 0 to 25 do t:=0.1*i; q||i:=display(механізм(0.4+X,Phi), textplot([0.4,0.8, cat("t=",convert (0.1*i, string)," ceк")]), scaling= constrained, axes=NONE); end do: > display([seq(q||i,i=0..25)], insequence=true,scaling= constrained, axes=NONE); |
Динаміка еліптичного маятника Формуємо
кадри анімації на проміжку
Кадри записуємо в масив , положення рівноваги повзуна взято у положенні 0.4, відображення моменту часу |
|||