

Сила f зчеплення з площиною у ньютонах

![]()



Рисунок 3.58
2. Знайдемо межі зміни прискорення центра мас котка, за умови його кочення без ковзання
Продовження табл. 3.3
№ блоку |
Текст програми |
Пояснення |
|
|
> plot(aC(P), P=P1..P2, color=red, title="Прискорення центра мас в м/С2",style=line,thickness=3); |
Побудова графіків:
(рис. 3.58) |
Прискорення центра мас в м/с2
Р, Н
![]()
Рисунок 3.59
3. Для граничних значень сили р знайдемо рівняння руху котка, якщо у початковий момент він перебував у стані спокою
Продовження табл. 3.3
№ блоку |
Текст програми |
Пояснення |
|||
9. |
> a1:=evalf(subs(P=P1,aC)): a2:=evalf(subs(P=P2,aC)):sС1:=a1*t^2/2; phi1:=s1/R; sС2:=a2*t^2/2; phi2:=s2/R; Закони руху котка |
Закони руху котка: |
|||
|
|
|
|
||
|
|
||||
|
|
||||
|
|||||
4. Змоделюємо рух котка для обох граничних випадків за отриманими законами руху
Продовження табл. 3.3
№ блоку |
Текст програми |
Пояснення |
10. |
Моделювання руху котка Параметри, що не залежать від часу y[1]:=R: a1:=evalf(subs(P=P1,aC)): a2:=evalf(subs(P=P2,aC)): p1:=evalf(P1/100): p2:=evalf(P2/1000): |
Моделювання руху котка
ордината центра котка, прискорення центра котка при граничних значеннях сили |
11. |
with(plots):with(plottools): arw:=0.05,0.15,0.3,color=red: Кількість кадрів K > T:=1.5: K:=72: Створюємо кадри руху for i from 0 to K do t:=i*T/K: Шрифт:=FONT(TIMES,ITALIC,20): Закони руху котка s1:=a1*t^2/2: phi1:=s1/R: Координати рухомих точок x[1]:= s1: x[2]:=r*sin(beta-phi1)+s1: y[2]:=R+r*cos(beta-phi1): x[3]:=x[2]+p1*cos(beta): y[3]:=y[2]-p1*sin(beta): Підписи тіл на рисунку F1:=arrow([x[2],y[2]],[x[3],y[3]],arw): T1:=PLOT(TEXT([x[3]-0.25,y[3]+0.4], 'Fg1'),Шрифт,COLOR(HUE,0)): P1[i]:=display(Cir(1,r),Cir(1,R),Рухоме_колесо(1,r,phi1), Рухоме_колесо (1,R,phi1), F1,T1):od: |
параметри векторів,
кінцевий час, кількість кадрів,
закони руху котка,
координати точок: абсциса центра котка, координати початку вектора сили , координати кінця вектора сили , вектор , підпис сили |
12. |
Зображення котка у русі PP1:=display(seq(P1[i],i=0..K), insequence=true, thickness=2, scaling= constrained, axes=none): |
Зображення котка на дисплеї комп’ютера |
Рекомендації щодо написання програми для дослідження плоскопаралельного руху тіла (див. табл. 3.3).
Блок 1 є обов’язковим для будь-якої програми, а підпрограма, що використовується у блоці 2 вже змодельована на кафедрі теоретичної механіки і студент може її взяти у готовому вигляді.
Примітка:
у готовій підпрограмі при бажанні можна
змінювати тільки
кольори
графічних об’єктів в операторі
![]() .
.
У блоці:
 студент
вводить параметри котка згідно виданому
завданню (табл. 3.3);
студент
вводить параметри котка згідно виданому
завданню (табл. 3.3);
 необхідно
ввести диференціальні рівняння руху
котка;
необхідно
ввести диференціальні рівняння руху
котка;
 з
рівнянь (3.233) визначають реакцію
,
силу зчеплення
,
прискорення центра котка
з
рівнянь (3.233) визначають реакцію
,
силу зчеплення
,
прискорення центра котка
 як функцію зовнішньої сили
;
як функцію зовнішньої сили
; будують
графіки залежності
будують
графіки залежності
 ,
,
 ,
,
 на
проміжку
на
проміжку
 ;
; виводять
на друк значення
зовнішньої сили, при яких коток котиться
без ковзання;
виводять
на друк значення
зовнішньої сили, при яких коток котиться
без ковзання; будують
графік залежності прискорення центра
мас котка
будують
графік залежності прискорення центра
мас котка
 для
тих значень сили
,
при яких кочення відбувається без
ковзання;
для
тих значень сили
,
при яких кочення відбувається без
ковзання; виводять
на друк закони руху котка при граничних
значеннях сили
;
виводять
на друк закони руху котка при граничних
значеннях сили
; моделювання
руху котка розпочинають з введення
параметрів, що не залежать від часу;
моделювання
руху котка розпочинають з введення
параметрів, що не залежать від часу; вводять
параметри; що змінюються з часом;
вводять
параметри; що змінюються з часом;виводять зображення котка на дисплей комп’ютера.
У результаті спостерігаємо на екрані дисплея ком-п’ютера рух котка при граничних значеннях сили (рис. 3.60).
|
|
|
|



Рисунок 3.60
РОЗДІЛ 4
ЕЛЕМЕНТИ АНАЛІТИЧНОЇ МЕХАНІКИ
4.1. Диференціальні принципи механіки
4.1.1. Основні положення
Диференціальні принципи аналітичної механіки визначають закономірності руху системи точок за досить малий проміжок часу. В аналітичній механіці Лагранжа є два диференціальних принципи: принцип можливих переміщень (Лагранжа) і принцип Даламбера-Лагранжа.
Принцип можливих переміщень є наслідком визначення можливих переміщень і деяких властивостей в’язей.
Поняття про малі переміщення належить до найважливіших понять аналітичної механіки. Відрізнятимемо можливі, здійснені та дійсні переміщення.
Можливими називають малі переміщення, що дозволяються в’язями в певний фіксований момент часу.
Ці поняття кінематичні і уявні, тобто вони ніяк не пов’язані з силами, діючими на точки системи. При наданні точкам системи можливих переміщень нестаціонарні в’язі необхідно вважати “зупиненими”, а час фіксованим.
Здійсненими переміщеннями називають переходи точок системи з одного положення в просторі і в часі в інші, які дозволяють в’язі. Час при цьому не фіксується, нестаціонарні в’язі не “зупиняються”.
Дійсні переміщення відповідають справжньому закону руху системи і відбуваються під дією сил, прикладених до точок системи. Ці переміщення утворюють одну із систем здійснених переміщень.
У загальному випадку можливі і здійсненні переміщення не можуть збігатися. Але якщо в’язі, накладені на точки системи, стаціонарні, то можливі і здійсненні переміщення можуть збігатися. У цьому випадку дійсні переміщення утворюють одну з систем можливих переміщень.
Тут і
далі позначатимемо вектор можливого
переміщення
![]() ,
здійсненого
,
здійсненого
![]() ,
дійсного
.
,
дійсного
.
З’ясуємо деякі властивості в’язей. У § 3.2.1 дано аналітичне визначення в’язей і розглянуто окремий випадок – поняття ідеальних в’язей. Розглянемо властивості ідеальних в’язей, звернувшись до найпоширеніших прикладів в’язей: поверхня, стержень, трос.
Н
Рисунок 4.1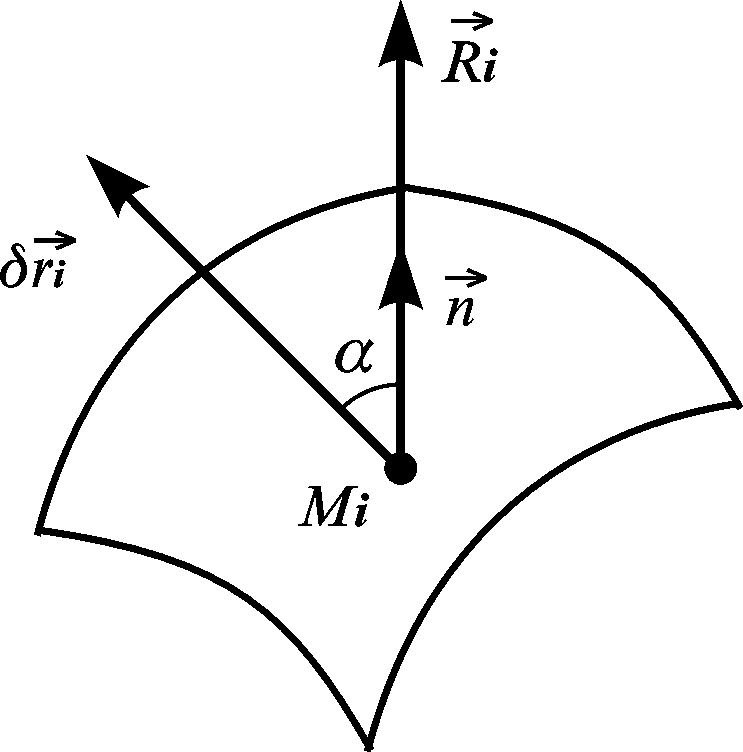
![]() такої в’язі збігається з нормаллю
до поверхні. Надамо точці можливого
переміщення
такої в’язі збігається з нормаллю
до поверхні. Надамо точці можливого
переміщення
![]() .
Вектор
напрямлений по дотичній до поверхні,
якщо точка залишається на ній
.
Вектор
напрямлений по дотичній до поверхні,
якщо точка залишається на ній
![]() ,
і утворює гострий кут з нормаллю, якщо
точка покидає поверхню
,
і утворює гострий кут з нормаллю, якщо
точка покидає поверхню
![]() ,
тобто
,
тобто
![]() .
.
В’язь, яку точка може покинути, називають неутримувальною, або однобічною.
Обчислимо
елементарну роботу
![]() ,
яку виконує реакція в’язі
на можливому переміщенні
:
,
яку виконує реакція в’язі
на можливому переміщенні
:
![]() .
(4.1)
.
(4.1)
Якщо на поверхні знаходиться система точок, то вираз (4.1) набуває вигляду
![]() (4.2)
(4.2)
Знак нерівності відповідає випадку, коли точки покидають в’язь.
Розглянемо приклад утримувальної в’язі – абсолютно твердий стержень, що з’єднує дві матеріальні точки (рис. 4.2).
Надамо
точкам можливих переміщень
![]() і
і
![]() і обчислимо елементарну роботу реакцій
і обчислимо елементарну роботу реакцій
![]() і
і
![]() на цих переміщеннях. Для цього скористаємося
теоремою про роботу сил, що діють на
абсолютно тверде тіло. Внаслідок того,
що сили
і
рівні за модулем і протилежні за напрямом,
їх головний вектор і головний момент
дорівнюють нулеві.
на цих переміщеннях. Для цього скористаємося
теоремою про роботу сил, що діють на
абсолютно тверде тіло. Внаслідок того,
що сили
і
рівні за модулем і протилежні за напрямом,
їх головний вектор і головний момент
дорівнюють нулеві.
![]() .
(4.3)
.
(4.3)

Рисунок 4.2
Поверхня
– однобічна в’язь, тому
![]() ,
стержень – двобічна, тому
,
стержень – двобічна, тому
![]() .
Узагальнимо отримані результати.
.
Узагальнимо отримані результати.
Сума робіт реакцій ідеальних в’язей на можливих переміщеннях точок системи – величина додатна або рівна нулеві:
![]() .
(4.4)
.
(4.4)
Знак нерівності у виразі (4.4) відповідає наявності однобічних в’язей і таких можливих переміщень, що звільняють точки системи від цих в’язей.