

3.3.3. Теорема про зміну кінетичної енергії матеріальної системи
Кінетична енергія Т системи дорівнює сумі кінетичних енергій точок, які складають систему:
![]() .
(3.117)
.
(3.117)
Якщо до кожної точки застосувати теорему про зміну кінетичної енергії, то дістанемо рівність
![]() ,
,
де
![]() — повна робота всіх зовнішніх і внутрішніх
сил, прикладених до цієї точки. Додавши
рівності по всіх і,
дістанемо
— повна робота всіх зовнішніх і внутрішніх
сил, прикладених до цієї точки. Додавши
рівності по всіх і,
дістанемо
![]() ,
,
або
![]() .
(3.118)
.
(3.118)
Приріст кінетичної енергії системи за певний проміжок часу дорівнює роботі всіх (внутрішніх і зовнішніх) сил, прикладених до точок системи, виконаній за той самий проміжок часу.
Це твердження є змістом теореми про зміну кінетичної енергії системи.
Одна з особливостей цієї теореми – що в ній ураховується робота внутрішніх сил. Звичайно головний вектор і головний момент внутрішніх сил дорівнюють нулеві, але робота, виконана ними, може відрізнятися від нуля. Наприклад, система складається з двох точок, сили їх взаємодії є силами тяжіння. Нехай одна точка нерухома, а друга наближається до першої. Головний вектор внутрішніх сил дорівнює нулеві, робота сили, яка прикладена до першої (нерухомої) точки, дорівнює нулеві, а робота другої сили відмінна від нуля.
Зрозуміло, що
при незмінній системі робота внутрішніх сил дорівнює нулеві.
Доведена теорема – частинний випадок більш загальної теореми про зміну та збереження енергії. Зокрема,
робота є мірою тієї частини кінетичної енергії, яка або виникла з інших форм енергії, або перетворилася в інші форми.
При застосуванні теореми (3.118) до конкретних задач потрібно навчитись обчислювати як кінетичну енергію системи та твердого тіла, так і роботу. |
Якщо
система є певним об’ємом
суцільного середовища, то розкладемо
його на
елементів з масами
![]() ;
швидкість певної внутрішньої точки
елемента дорівнює
;
швидкість певної внутрішньої точки
елемента дорівнює
![]() .
На підставі (3.117) приблизно обчислимо
кінетичну енергію вказаного об’єму
.
На підставі (3.117) приблизно обчислимо
кінетичну енергію вказаного об’єму
![]() .
.
Точне
значення кінетичної енергії дістанемо
після граничного переходу, якщо
![]() при
при
![]() .
Таким чином, кінетична
енергія суцільного середовища,
зокрема абсолютно твердого тіла, дорівнює
.
Таким чином, кінетична
енергія суцільного середовища,
зокрема абсолютно твердого тіла, дорівнює
![]() ,
(3.119)
,
(3.119)
де — маса тіла.
Розглянемо окремі випадки обчислення кінетичної енергії для різних видів руху.
Випадок 1. Якщо тіло рухається поступально, то швидкості всіх його точок однакові і дорівнюють швидкості центра мас . Отже, кінетична енергія тіла, яке рухається поступально,
![]() ,
(3.120)
,
(3.120)
тобто обчислюється як кінетична енергія точки, маса якої дорівнює масі системи.
Випадок 2. Обчислимо кінетичну енергію тіла, яке має нерухому точку.
Розподіл
швидкостей відповідає формулі Ейлера
![]() ,
а проекції швидкості на осі координат,
початок яких збігається з нерухомою
точкою,
,
а проекції швидкості на осі координат,
початок яких збігається з нерухомою
точкою,

На підставі (3.119)
![]()
![]() ;
(3.121)
;
(3.121)
![]()
![]() .
(3.122)
.
(3.122)
Інтеграли, які входять до перших трьох доданків, називають осьовими моментами інерції:
![]()
![]() (3.123)
(3.123)
Величини, визначені формулами (3.123), називають відцентровими моментами інерції.
На підставі (3.121), (3.122) і (3.123) вираз кінетичної енергії набуває вигляду
![]()
(3.124)
![]() .
.
Випадок
3.
Якщо тіло
обертається навколо нерухомої осі,
наприклад, осі
,
то
![]() ,
і кінетична енергія тіла
,
і кінетична енергія тіла
![]() .
(3.125)
.
(3.125)
Порівнюючи вирази (3.120) і (3.125), можна визначити, що
момент інерції відносно осі – фізична величина, яка характеризує властивості інерції тіла при його обертанні навколо осі.
Обчислимо кінетичну енергію системи в її довільному русі.
Кожна
точка системи здійснює складний рух,
швидкість якого складається з переносної
і відносної швидкостей. Нехай переносний
рух буде поступальним зі швидкістю, яка
дорівнює швидкості центра мас системи
![]() .
Тоді абсолютна швидкість точки
.
Тоді абсолютна швидкість точки
![]() .
.
де
![]() – відносна швидкість точки.
– відносна швидкість точки.
Цей вираз підставимо в (3.117)
![]()
 .
.
Останній член дорівнює нулеві на підставі формул (3.62) і (3.65)
![]() ,
,
оскільки
![]() – це відносна швидкість центра мас
відносно самого себе. Остаточно знайдемо
– це відносна швидкість центра мас
відносно самого себе. Остаточно знайдемо
![]() .
(3.126)
.
(3.126)
На підставі (3.126) сформулюємо теорему (вона назива- ється теоремою Кеніга):
кінетична енергія системи дорівнює кінетичній енергії поступального руху системи разом із центром мас і кінетичній енергії точок системи при їх русі відносно центра мас.
Рухом точок відносно центра мас називають їх рух відносно системи координат з початком у центрі мас, яка рухається поступально.
Випадок
4.
При плоскопаралельному
русі твердого тіла
відносна швидкість
![]() точок є швидкістю обертального руху
навколо центра мас, яка дорівнює
точок є швидкістю обертального руху
навколо центра мас, яка дорівнює
![]() .
Отже, на підставі (3.126) знайдемо кінетичну
енергію твердого тіла при плоскопаралельному
русі
.
Отже, на підставі (3.126) знайдемо кінетичну
енергію твердого тіла при плоскопаралельному
русі
![]() ,
(3.127)
,
(3.127)
де
![]() – момент інерції тіла відносно осі, яка
проходить перпендикулярно до площини,
у якій відбувається плоскопара-лельний
рух, через центр мас тіла. Цю вісь
називають
центральною.
– момент інерції тіла відносно осі, яка
проходить перпендикулярно до площини,
у якій відбувається плоскопара-лельний
рух, через центр мас тіла. Цю вісь
називають
центральною.
Випадок 5. Якщо у (3.126) замість останнього члена в правій частині поставити (3.124), то дістанемо вираз кінетичної енергії вільного твердого тіла.
Оскільки рух навколо нерухомої точки можна розглядати як рух навколо миттєвої осі, яка проходить через нерухому точку, то кінетичній енергії вільного тіла можна надати вигляду
![]() ,
(3.128)
,
(3.128)
де
![]() – момент інерції тіла відносно миттєвої
осі, яка змінює з часом свій напрям.
– момент інерції тіла відносно миттєвої
осі, яка змінює з часом свій напрям.
Обчислимо роботу сил, які прикладені до абсолютно твердого тіла.
Точка
О
– його полюс, точка
нерухома. Розглянемо роботу сили
![]() (рис. 3.30):
(рис. 3.30):
![]() .
(3.129)
.
(3.129)
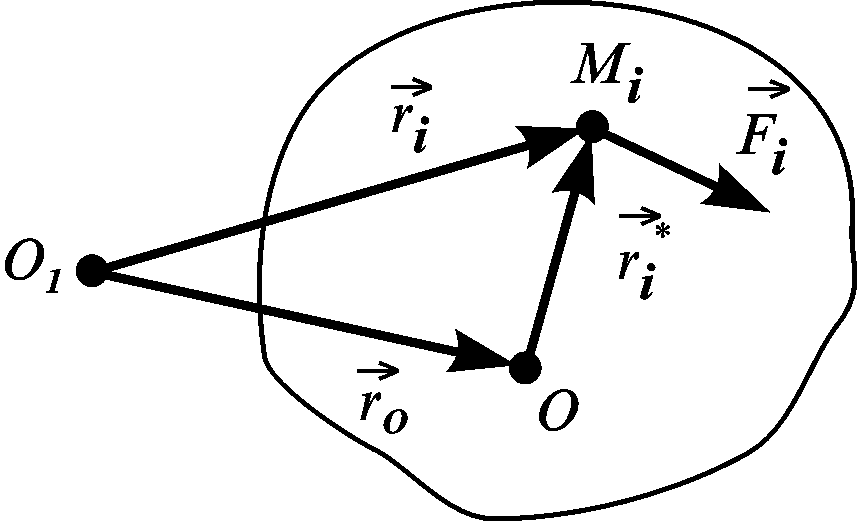
Рисунок 3.30
Проведемо
радіуси-вектори точки
![]() і
і
![]() ,
причому
,
причому
![]() .
.
Диференціюючи цей вираз, дістаємо
![]() .
.
Швидкість довільної точки твердого тіла
![]() ,
,
або
![]() .
.
Помножимо ліву й праву частини цієї рівності на :
![]() .
.
Позначимо
добуток
![]() через
через
![]() ,
який називають елементарним
кутом обертання
тіла навколо осі, що проходить через
полюс.
,
який називають елементарним
кутом обертання
тіла навколо осі, що проходить через
полюс.
Отже, для твердого тіла виконується рівність
![]() .
(3.130)
.
(3.130)
На підставі (3.130) обчислимо елементарну роботу (3.129)
![]() ,
,
або
![]() .
(3.131)
.
(3.131)
Вираз (3.131) є наслідком циклічної перестановки множників у скалярно-векторному добутку.
Елементарна робота всіх сил, прикладених до твердого тіла, дорівнює алгебраїчній сумі елементарних робіт сил:
 .(3.132)
.(3.132)
Тут
![]() та
та
![]() винесено за знак суми, оскільки вони
однакові для всіх точок.
винесено за знак суми, оскільки вони
однакові для всіх точок.
Але
![]() ,
тобто дорівнює головному вектору системи
сил, а
,
тобто дорівнює головному вектору системи
сил, а
![]() ,
тобто дорівнює головному моменту системи
сил відносно полюса О.
,
тобто дорівнює головному моменту системи
сил відносно полюса О.
Таким чином,
![]() ,
(3.133)
,
(3.133)
тобто
елементарна робота сил, прикладених до абсолютно твердого тіла, дорівнює роботі, яку виконує головний вектор системи сил на переміщенні полюса, і роботі головного моменту системи сил відносно полюса на обертальному переміщенні навколо осі, яка проходить через полюс.
Якщо
тіло рухається поступально,
то
![]()
![]() ,
,
Якщо
тіло обертається
навколо нерухомої осі,
то
![]() і
і
![]() .
.
Покажемо, що робота внутрішніх сил, прикладених до точок абсолютно твердого тіла, дорівнює нулеві.
Дійсно, з (3.133)
![]()
оскільки
![]() за третім законом Ньютона, то
за третім законом Ньютона, то
![]() .
.
Примітка. При малій кількості годин, відведених на вивчення теоретичної механіки, поняття про головний вектор і головний момент можна запровадити саме тут і далі дістати рівняння рівноваги таким способом.
Означення. Абсолютно тверде тіло перебуває в рівновазі, якщо його кінетична енергія не змінюється, або дорівнює нулеві.
На підставі теореми про зміну кінетичної енергії системи (3.118), яку подамо в диференціальній формі, і наведеного означення стану рівноваги можна написати
![]() .
(3.134)
.
(3.134)
Але згідно з теоремою про обчислення роботи сил, прикладених до абсолютно твердого тіла, маємо
![]() .
(3.135)
.
(3.135)
Достатньою умовою виконання рівності нулеві цього виразу буде рівність одночасно нулеві головного вектора і головного моменту системи сил, які прикладені до твердого тіла
![]() .
(3.136)
.
(3.136)
Доведемо необхідність цих умов для рівноваги.
Оскільки
поступальне переміщення
тіла і обертальне
навколо полюса незалежні одне від
одного, то можна спочатку припустити,
що
![]() ;
а
;
а
![]() .
У цьому разі тіло рухається поступально.
Тоді на підставі (3.135) при рівновазі тіла
виконується рівність
.
У цьому разі тіло рухається поступально.
Тоді на підставі (3.135) при рівновазі тіла
виконується рівність
![]() ,
,
але
.
Отже, необхідно, щоб
![]() .
.
Припустимо,
що
![]() ,
тобто тіло обертається навколо осі.
,
тобто тіло обертається навколо осі.
Згідно з (3.135)
![]() .
.
Оскільки
![]() ,
то
,
то
![]() .
.
Таким чином, дістали фізичні умови рівноваги (1.38) твердого тіла.