

2.3.2. Теорема про додавання швидкостей точки
Скористаємося
векторною формою визначення руху і
побудуємо радіуси-вектори
![]() і
і
![]() ,
що визначають положення точки відповідно
в нерухомій і рухомій системах координат.
Вектор
,
що визначають положення точки відповідно
в нерухомій і рухомій системах координат.
Вектор
![]() визначає положення початку рухомої
системи координат.
визначає положення початку рухомої
системи координат.
Введемо
умовно три параметри часу:
– час в абсолютному русі;
![]() – в переносному;
– в переносному;
![]() – у відносному. Згідно з уявленнями
класичної механіки, між цими параметрами
існує рівність
– у відносному. Згідно з уявленнями
класичної механіки, між цими параметрами
існує рівність
![]() ;
;
![]() ;
; ![]() .
(2.98)
.
(2.98)
Вектор змінюється тільки в переносному русі, вектори і – і в переносному, і у відносному
![]() .
.
Абсолютна
швидкість точки – це зміна вектора
![]() в абсолютному часі
:
в абсолютному часі
:
![]() .
.
Обчислюючи
похідну від функції
як складної функції двох змінних
і
![]() дістаємо:
дістаємо:
![]() ,
,
Згідно
з (2.98)
![]() ,
тому
,
тому
![]() .
(2.99)
.
(2.99)
Переносною
швидкістю
![]() називають зміну просторового положення
точки в часі переносного руху.
Тому визначимо
називають зміну просторового положення
точки в часі переносного руху.
Тому визначимо
![]() як похідну від
за
:
як похідну від
за
:
![]() .
(2.100)
.
(2.100)
Відносною
швидкістю
![]() називають зміну просторового положення
точки за часом відносного руху.
Тому визначимо
називають зміну просторового положення
точки за часом відносного руху.
Тому визначимо
![]() як похідну від
за
:
як похідну від
за
:
![]() .
(2.101)
.
(2.101)
Рівність (2.99) на підставі (2.100) і (2.101) набуває вигляду
![]() .
(2.102)
.
(2.102)
Рівність (2.102) є математичним виразом теореми про додавання швидкостей:
швидкість абсолютного руху точки дорівнює геометричній сумі швидкостей відносного і переносного рухів.
Модуль
абсолютної швидкості можна знайти за
відомою формулою тригонометрії, якщо
відомі
![]() ,
,
![]() і кут між ними.
і кут між ними.
2.3.3. Теорема про додавання прискорень точки
Абсолютне прискорення точки – фізична величина, що характеризує зміну її абсолютної швидкості в абсолютному часі t:
![]() .
(2.103)
.
(2.103)
Вектори і змінюються і в переносному, і у відносному рухах, тому
![]() ;
; ![]() .
(2.104)
.
(2.104)
З виразів (2.103) і (2.104) маємо
![]()
Взявши до уваги (2.98), дістанемо
![]() .
(2.105)
.
(2.105)
Переносним прискоренням називають зміну переносної швидкості за часом t1 переносного руху:
![]() .
(2.106)
.
(2.106)
Відносним прискоренням називають зміну відносної швидкості за часом t2 відносного руху:
![]() .
(2.107)
.
(2.107)
Таким
чином, до формули (2.105) входять
![]() ,
,
![]() і величина
і величина
![]() ,
(2.108)
,
(2.108)
яку називають прискоренням Коріоліса.
З формули (2.108) випливає, що прискорення Коріоліса характеризує зміну переносної швидкості у відносному русі і зміну відносної швидкості у переносному русі.
Отже, (2.105) на підставі (2.106), (2.107), (2.108) набуває вигляду
![]() (2.109)
(2.109)
Формула (2.109) є математичним виразом теореми Коріоліса:
абсолютне прискорення точки є векторною сумою прискорень переносного, відносного і коріолісового.
Розглянемо формулу (2.108) і перетворимо її так, щоб вона була зручною для розв’язування задач. Для цього скористаємося виразами (2.100) і (2.101). Дістанемо
 .
(2.110)
.
(2.110)
Вектор
![]() визначає зміну вектора
за часом переносного руху. Якщо переносний
рух поступальний, вектор
не змінюється, його похідна за
дорівнює нулеві, і прискорення Коріоліса
в цьому випадку відсутнє. Якщо переносний
рух є обертальним навколо певної осі з
кутовою швидкістю
,
то за формулою Ейлера (2.54)
визначає зміну вектора
за часом переносного руху. Якщо переносний
рух поступальний, вектор
не змінюється, його похідна за
дорівнює нулеві, і прискорення Коріоліса
в цьому випадку відсутнє. Якщо переносний
рух є обертальним навколо певної осі з
кутовою швидкістю
,
то за формулою Ейлера (2.54)
![]() .
(2.111)
.
(2.111)
Кутова швидкість переносного руху змінюється лише у переносному русі, тобто
![]() .
(2.112)
.
(2.112)
Тому на підставі (2.101), (2.110)-(2.112) маємо
![]() .
(2.113)
.
(2.113)
Напрям
вектора
![]() слід визначати за відомим правилом
векторної алгебри. Модуль вектора
слід визначати за відомим правилом
векторної алгебри. Модуль вектора
![]() .
(2.114)
.
(2.114)
З формули (2.114) видно, що прискорення Коріоліса дорівнює нулеві в трьох випадках:
Випадок
1.
Якщо
![]() ,
тобто переносний рух – посту-
,
тобто переносний рух – посту-
пальний.
Випадок
2. У ті моменти часу,
коли
![]() .
.
Випадок
3. Якщо
![]() ,
тобто вектори
,
тобто вектори
![]()
і колінеарні.
Приклад
2.8. Компресор з
криволінійними каналами рівномірно
обертається зі сталою кутовою швидкістю
навколо осі
,
перпендикулярної до площини рисунка
(рис. 2.47). Повітря тече по криволінійному
каналу АВ
зі сталою відносною швидкістю
![]() .
Знайти проекції абсолютної швидкості
і абсолютного прискорення на осі
координат
.
Знайти проекції абсолютної швидкості
і абсолютного прискорення на осі
координат
![]() для частинки повітря, що перебуває в
точці
каналу, якщо радіус кривини каналу у
цій точці дорівнює
,
кут між нормаллю до кривої
і радіусом
для частинки повітря, що перебуває в
точці
каналу, якщо радіус кривини каналу у
цій точці дорівнює
,
кут між нормаллю до кривої
і радіусом
![]() дорівнює
,
дорівнює
,
![]() .
.
Розв’язання. Відносна швидкість частинки повітря в точці відома, тому для визначення абсолютної швидкості знайдемо переносну швидкість частинки, яка є швидкістю точки каналу в обертальному русі разом з компресором:
![]() .
.
Абсолютна швидкість
![]() .
.
Знайдемо її проекції на осі координат і (див рис. 2.47).
![]() ;
;
![]() .
.
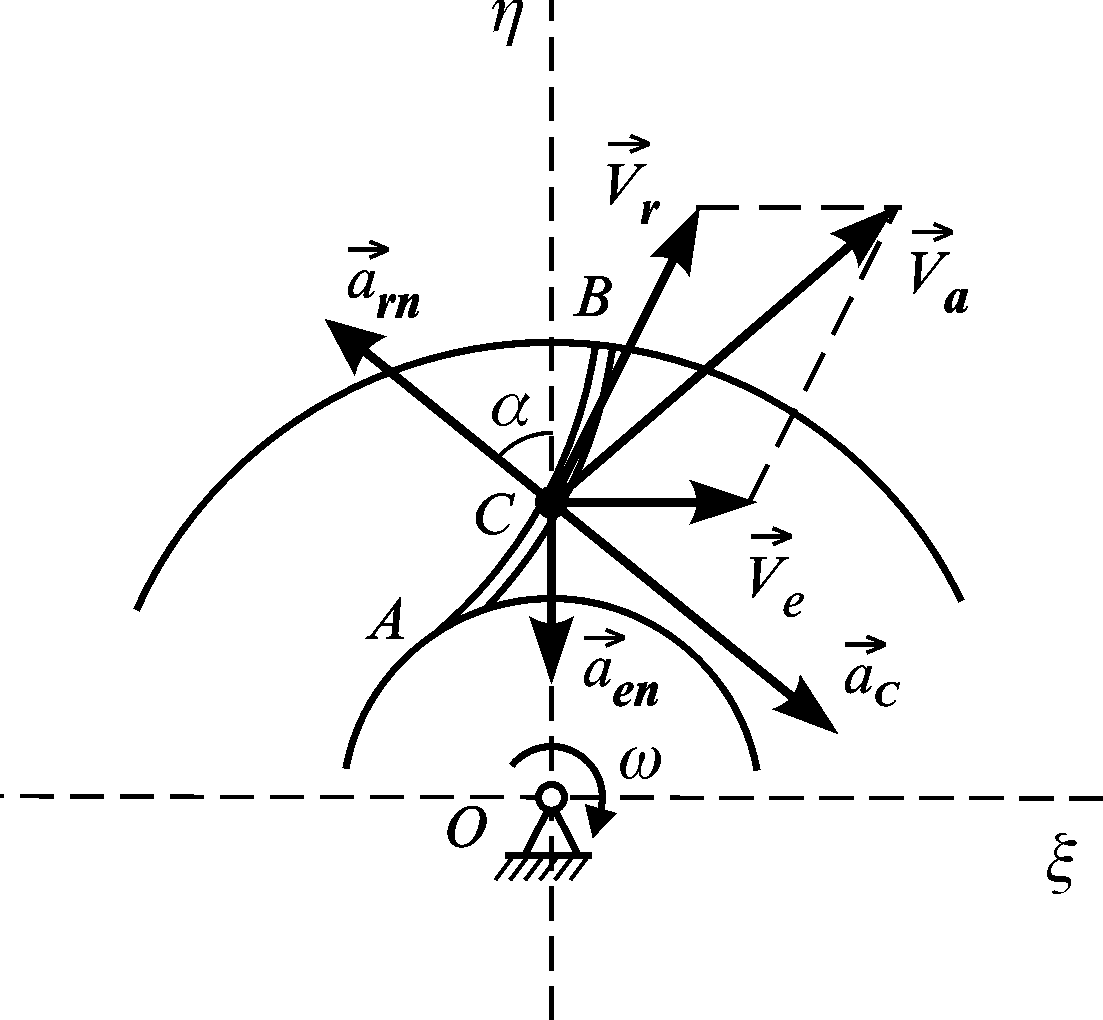
Рисунок 2.47
Визначимо абсолютне прискорення, застосовуючи теорему Коріоліса:
![]() .
.
Відносний рух – рух частинки вздовж каналу , тому відносне прискорення складається з нормального і дотичного:
![]() ,
,
де
![]() ;
;
![]() (відносна
швидкість – стала). Отже, відносне
прискорення частинки повітря спрямоване
до центру кривини каналу.
(відносна
швидкість – стала). Отже, відносне
прискорення частинки повітря спрямоване
до центру кривини каналу.
Оскільки переносний рух – рух точки каналу, то переносне прискорення – це прискорення точки тіла, що обертається навколо нерухомої осі. Отже,
![]() ,
,
де
![]()
![]() ;
;
![]() .
.
Отже, переносне прискорення частинки повітря спрямоване до нерухомої осі компресора.
Прискорення Коріоліса
![]() .
.
Воно лежить у площині рисунка і збігається з нормаллю до каналу . Його модуль
![]() .
.
Знаходимо проекції абсолютного прискорення на осі і :
![]() ;
;
![]() .
.
Задачі для самостійного розв’язування
Задача
2.12. У трубці, що обертається
за законом
![]() (рад) навколо осі
,
рухається кулька (рис. 2.48). Закон її руху
(рад) навколо осі
,
рухається кулька (рис. 2.48). Закон її руху
![]() (см).
Чому дорівнює абсолютна швидкість
кульки в момент
(см).
Чому дорівнює абсолютна швидкість
кульки в момент
![]() с? Покажіть на рисунку напрями складових
абсолютного прискорення кульки в цей
момент.
с? Покажіть на рисунку напрями складових
абсолютного прискорення кульки в цей
момент.
Відповідь:
![]()
![]() см/с.
см/с.
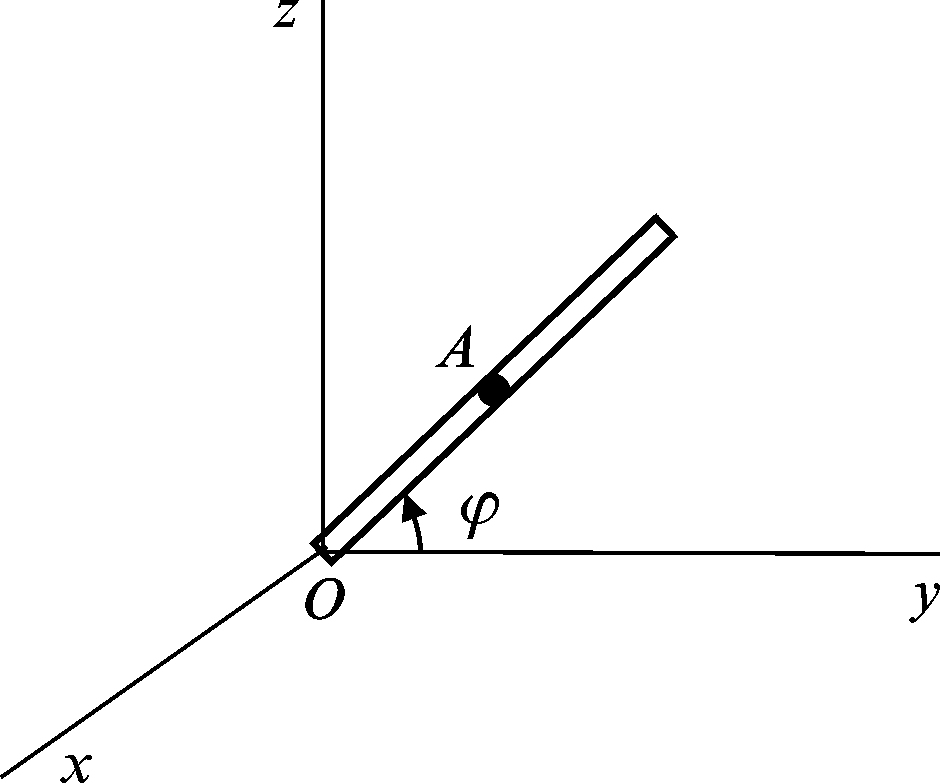
Рисунок 2.48
Задача
2.13. Кривошип
![]() м обертається навколо осі
з кутовою швидкістю
м обертається навколо осі
з кутовою швидкістю
![]() рад/с і надає поступального руху кулісі
(рис. 2.49). Знайти швидкість куліси в
момент, коли
рад/с і надає поступального руху кулісі
(рис. 2.49). Знайти швидкість куліси в
момент, коли
![]() .
.
Відповідь:
![]() 0,2
м/с.
0,2
м/с.
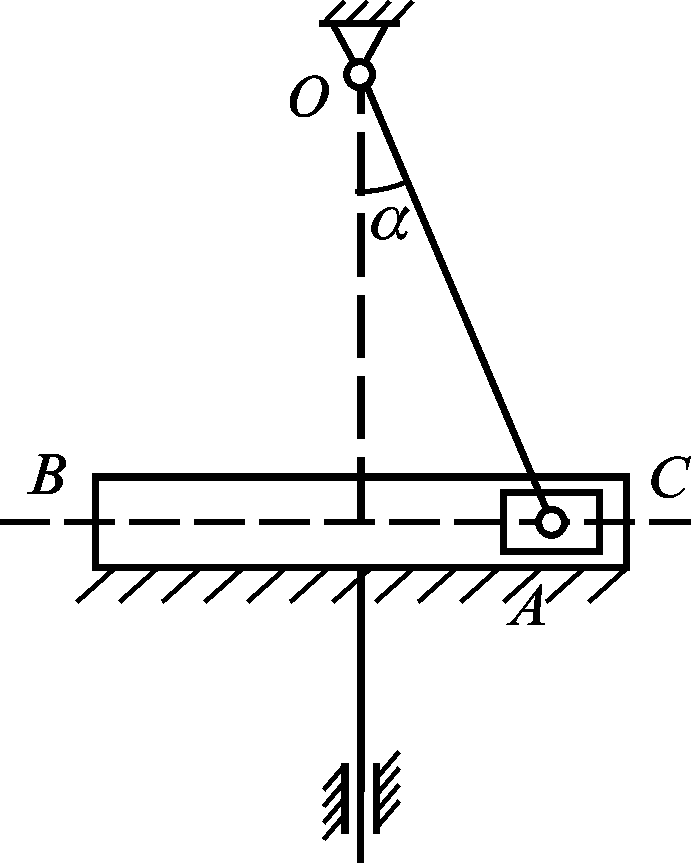
Рисунок 2.49