

Приклади
Приклад
2.3.
Розглянемо рівнозмінний
обертальний
рух
тіла
навколо нерухомої осі.
У цьому разі кутове
прискорення тіла – величина
стала
(![]() ).
).
Згідно
з (2.43)
![]() ,
або
,
або
![]() ,
,
звідки
![]() .
.
Користуючись (2.42), маємо
![]() .
.
Інтегруючи, дістаємо
![]() ,
,
де і – сталі інтегрування, які знаходять з початкових умов.
Якщо
![]() ,
,
то дістанемо
![]() .
.
Отже, маємо
закон рівнозмінного обертального руху тіла навколо нерухомої осі:
![]() (2.67)
(2.67)
і закон зміни кутової швидкості в цьому русі:
![]() .
(2.68)
.
(2.68)
Приклад
2.4.
Два шківи І і ІІ з’єднано нескінченним
пасом (рис. 2.21). Радіуси шківів відповідно
![]() м і
м і
![]() м. Внутрішній радіус шківа ІІ
м. Внутрішній радіус шківа ІІ
![]() м. Знайти швидкість
точок паса і кутові швидкості обох
шківів, якщо рівняння руху тягаря
м. Знайти швидкість
точок паса і кутові швидкості обох
шківів, якщо рівняння руху тягаря
![]() (
– в сантиметрах,
– в секундах).
(
– в сантиметрах,
– в секундах).
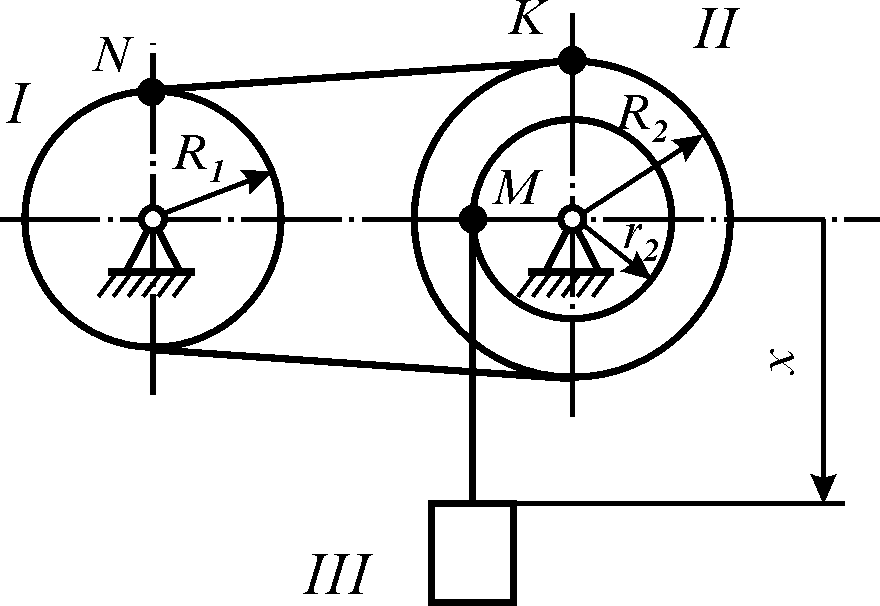
Рисунок 2.21
Простою передачею називають такий механізм, до складу якого входять тіла, що здійснюють тільки найпростіші рухи (поступальний, обертальний навколо нерухомої осі).
Оскільки трос, на якому підвішено тягар ІІІ, нерозтягнутий, то швидкість точки шківа ІІ дорівнює швидкості тягаря ІІІ.
З рівняння руху тягаря ця швидкість
![]() см/с.
см/с.
Отже, кутова швидкість шківа ІІ
![]() рад/с.
рад/с.
Оскільки
пас рухається без ковзання, то точки
обводів шківів мають однакову швидкість
![]() ,
тобто
,
тобто
![]() см/с,
см/с,
або
![]() .
.
Отже,
у простих передачах відношення кутових швидкостей обернено пропорційне радіусам шківів.
Звідки
![]() рад/с.
рад/с.
Задачі для самостійного розв’язування
Задача
2.3.
Тіло обертається навколо нерухомої осі
за законом
![]() .
Визначити швидкість точки тіла на
відстані
.
Визначити швидкість точки тіла на
відстані
![]() м від осі обертання в момент, коли
м від осі обертання в момент, коли
![]() рад.
рад.
Відповідь: 5 м/с.
Задача
2.4.
Закон обертального руху тіла
![]() .
Визначити прискорення точки тіла, що
знаходиться на відстані
.
Визначити прискорення точки тіла, що
знаходиться на відстані
![]() м від осі обертання.
м від осі обертання.
Відповідь:
![]() м/с2.
м/с2.
Задача
2.5.
Кутова швидкість колеса 1 змінюється
за законом
![]() .
Визначити прискорення тягаря 3 в момент
часу
.
Визначити прискорення тягаря 3 в момент
часу
![]() с, якщо радіуси
с, якщо радіуси
![]() м,
м,
![]() м і
м і
![]() м (рис. 2.22)
м (рис. 2.22)
Відповідь:
![]() м/с2.
м/с2.
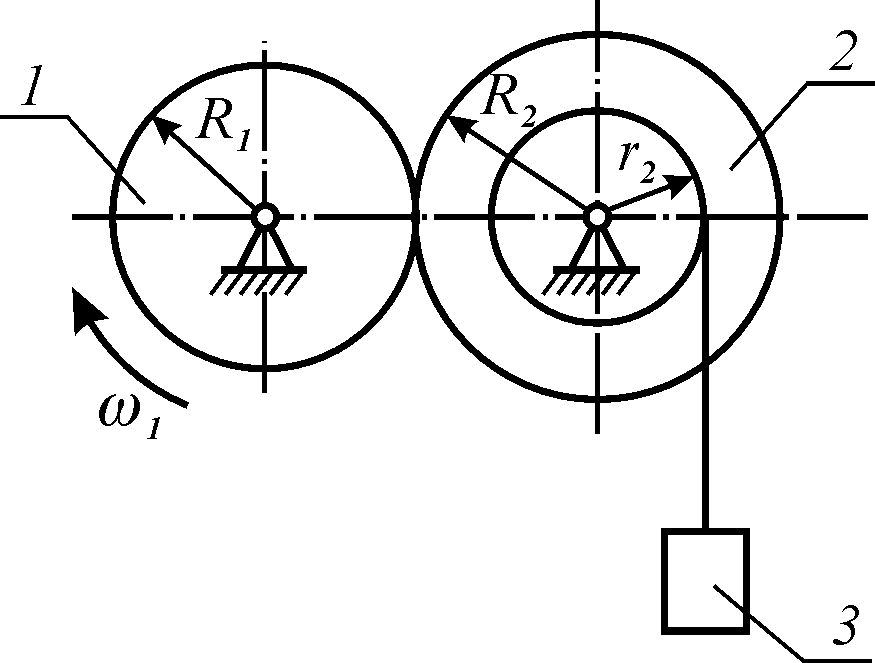
Рисунок 2.22
Запитання для самоконтролю
Який рух тіла називають поступальним?
Які основні характеристики поступального руху?
Який рух тіла називають обертальним навколо нерухомої осі?
Що називають кутовою швидкістю, кутовим прискоренням?
За якими формулами знаходять швидкість і прискорення точки в тілі, яке обертається навколо нерухомої осі?
Яка основна властивість абсолютно твердого тіла?
Чому дорівнює швидкість довільної точки вільного твердого тіла?
Як визначити прискорення довільної точки вільного твердого тіла?
2.2.6. Плоскопаралельний рух твердого тіла. Рівняння руху
Плоскопаралельним називають такий рух твердого тіла, під час якого всі точки тіла рухаються паралельно певній нерухомій площині, яку називають основною.
Багато механізмів, які зустрічаються на практиці, належать до так званих плоских механізмів. Тому вивчення плоскопаралельного руху тіла має істотне практичне значення.
Плоскопаралельний рух можна розглядати як окремий випадок руху вільного твердого тіла. У цьому випадку миттєва вісь обертання перпендикулярна до основної площини.
Покажемо,
що з означення плоскопаралельного руху
випливає можливість звести задачу
вивчення руху тіла в просторі до задачі
вивчення руху плоскої фігури в площині.
Тіло перебуває в плоскопаралельному
русі (рис. 2.23), площина
![]() – основна. Зробимо перетин
тіла площиною, паралельною основній, і
розглянемо рух прямої АВ,
перпендикулярної до площини
– основна. Зробимо перетин
тіла площиною, паралельною основній, і
розглянемо рух прямої АВ,
перпендикулярної до площини
![]() .
За означенням плоскопаралельного руху
рух прямої АВ
– поступальний. Отже, рух довільної
точки А
цієї прямої визначає цей поступальний
рух. Якщо повторити ці міркування для
будь-якої точки плоскої фігури
,
то можна твердити, що рух тіла повністю
визначається рухом фігури
.
.
За означенням плоскопаралельного руху
рух прямої АВ
– поступальний. Отже, рух довільної
точки А
цієї прямої визначає цей поступальний
рух. Якщо повторити ці міркування для
будь-якої точки плоскої фігури
,
то можна твердити, що рух тіла повністю
визначається рухом фігури
.
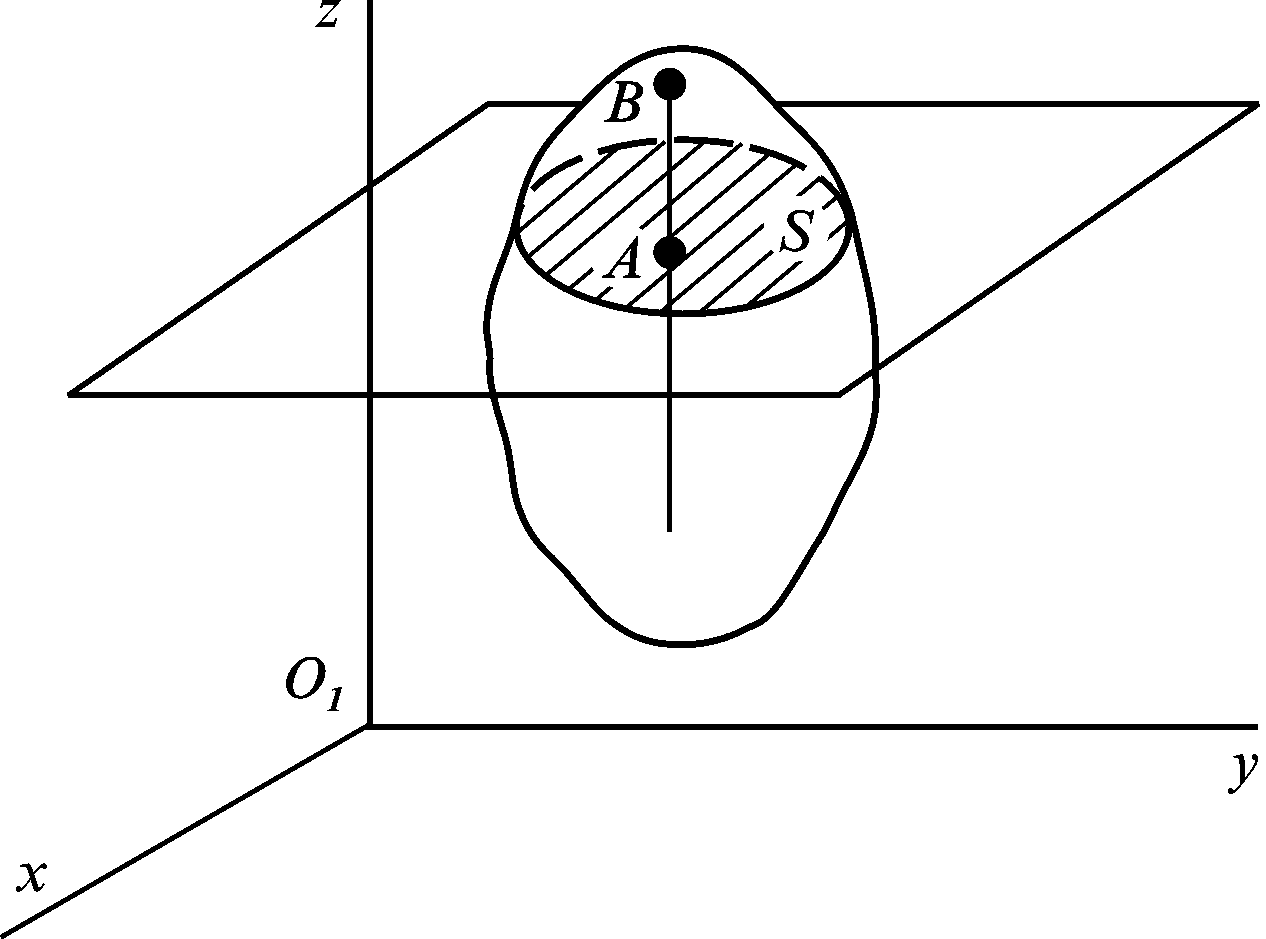
Рисунок 2.23
Складемо
рівняння руху плоскої фігури. Виберемо
дві системи координат: нерухому
і незмінно зв’язану з плоскою фігурою
![]() .
Положення системи координат
повністю визначає положення плоскої
фігури (рис. 2.24). Положення початку
координат (точки О)
відоме, якщо відомі її координати
.
Положення системи координат
повністю визначає положення плоскої
фігури (рис. 2.24). Положення початку
координат (точки О)
відоме, якщо відомі її координати
![]() .
Положення осей
.
Положення осей
![]() і
і
![]() визначається кутом
.
Отже, три параметри
визначається кутом
.
Отже, три параметри
![]() повністю
визначають положення плоскої фігури.
Якщо кожному моменту часу
поставити у відповідність значення
величин
повністю
визначають положення плоскої фігури.
Якщо кожному моменту часу
поставити у відповідність значення
величин
![]() ,
то дістанемо рівняння, які є законом
руху плоскої фігури:
,
то дістанемо рівняння, які є законом
руху плоскої фігури:
![]() ;
(2.69)
;
(2.69)
![]() ;
(2.70)
;
(2.70)
![]() .
(2.71)
.
(2.71)
Структура цих рівнянь показує, що
рух плоскої фігури можна розглядати як складний: поступальний разом з полюсом О – рівняння (2.69), (2.70) і обертальний навколо полюса О рівняння 2.71.
Якщо перенести полюс із точки О в іншу точку, рівняння (2.71) не зміниться, зміняться лише рівняння (2.69) і (2.70). З цих міркувань можна зробити висновок:
при
плоскопаралеьному русі твердого тіла
характеристики обертального руху (кут
повороту
,
кутова швидкість
![]() ,
кутове прискорення
,
кутове прискорення
![]() )
не залежать від вибору полюса.
)
не залежать від вибору полюса.
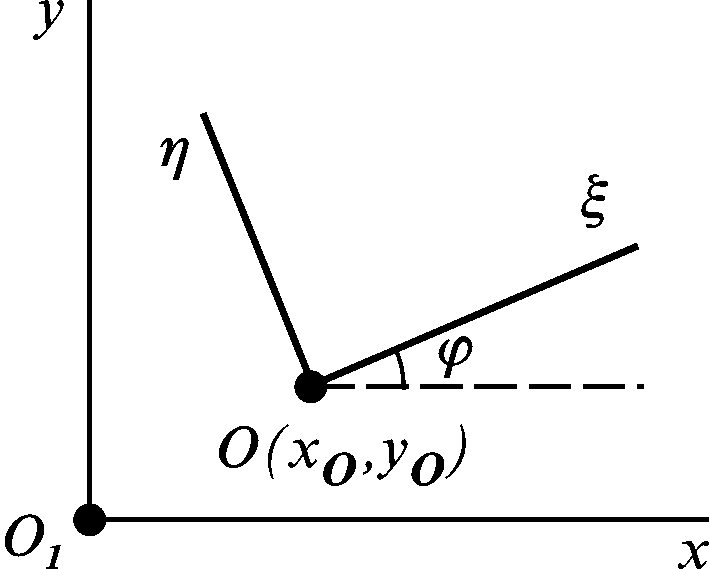
Рисунок 2.24
Розглядаючи плоскопаралельний рух як окремий випадок руху вільного твердого тіла, можна зобразити і у вигляді векторів, перпендикулярних до площини руху тіла.
Рівняння руху довільної точки М тіла знайдемо, скориставшись формулами перетворення координат:
![]() ;
;
![]() .
(2.72)
.
(2.72)