

3 Технічні характеристики та структура вимірювальних перетворювачів
Функції, для виконання яких використовують ВП, залежать від конструкції ВП та його основних характеристик, тому дуже важливо знати або дослідити їх при конструюванні або при виборі ВП.
3.1 Загальна структура вимірювального перетворювача
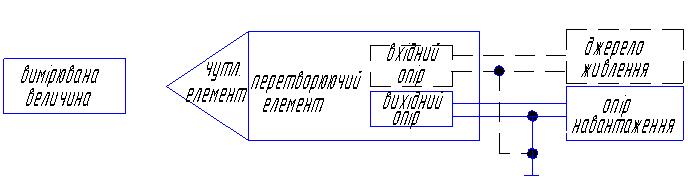
Рисунок 3.1 – Загальна структура ВП
ВП складається з чутливого елемента, який сприймає безпосередньо вимірювану величину, перетворюючого елемента (його робота основана на одному із вищеописаних явищ), який генерує деякий електричний вихідний сигнал в залежності від значення вимірюваної величини (формує вихідний сигнал). Перетворювач підключається до джерела живлення (яке може бути внутрішнім або його взагалі може не бути) і навантаження. Живлення необхідне ВП (за виключенням пасивних) для забезпечення їх точної роботи і може бути джерелом напруги або струму.
Опором джерела живлення називається опір джерела живлення; опір перетворювача по відношенню до джерела живлення, називається вхідним опором. Опір кабелю між джерелом живлення і перетворювачем завжди розглядається, як частина опору джерела.
Вихідний опір – це опір на вихідних клемах перетворювача. Опір, який прикладений до вихідних клем перетворювача, називається опором навантаження перетворювача. Будь – який опір кабелю між перетворювачем і навантаженням завжди розглядається як частина опору навантаження. Узгодження перетворювача з вимірювальною системою здійснюється шляхом врахування всіх розглянутих опорів.
Джерело живлення і вихідний сигнал електрично повністю ізольовані один від одного або мають спільний провід.
Зворотні проводи, як правило, електрично ізольовані від корпуса перетворювача і можуть бути заземлені.
При виборі перетворювача необхідно врахувати його характеристики. Існують чотири основні типи характеристик.
1. Статистичні характеристики
описують властивості перетворювача, який працює в лабораторних умовах з малими або навіть нульовими змінами значення вимірюваної величини.
До статичних характеристик ВП відносяться: лінійність, чутливість, гістерезис.
2. Динамічні характеристики
визначають властивості вимірювального перетворювача при швидкій зміні фізичної величини, що вимірюється.
Однією із найважливіших характеристик, які відносяться до динамічної роботи перетворювача, є час спрацювання. Тобто час, напротязі якого встановлюється вихідний сигнал перетворювача у відповідь на зміну значення вимірюваної величини.
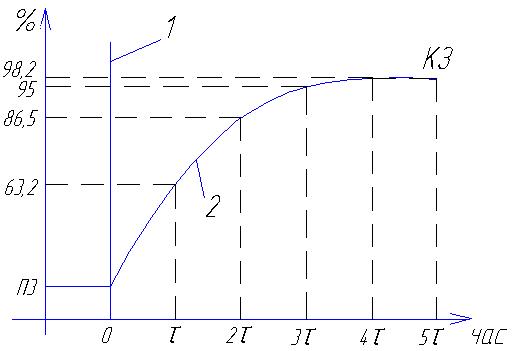
Рисунок 3.2 – Перехідна характеристика лінійного перетворювача I порядку
КЗ – кінцеве значення;
ПЗ – початкове значення;
1 – миттєве значення;
2 – кінцеве значення.
Коли розглядається час спрацювання датчика, вважають, що зміна вимірюваної величини відбувається стрибкоподібно, тобто миттєво від одного значення до іншого.
Перехідна
характеристика цього перетворювача є
експоненціальною, а час зростання
вихідного сигналу від початкового
значення до 63,2%
КЗ називається
постійною часу і позначається
![]() .
.
Після
![]() вважаємо, що вихідний сигнал більше не
змінюється. Для лінійного перетворювача
I
ряду час спрацювання чисельно дорівнює
постійній часу.
вважаємо, що вихідний сигнал більше не
змінюється. Для лінійного перетворювача
I
ряду час спрацювання чисельно дорівнює
постійній часу.
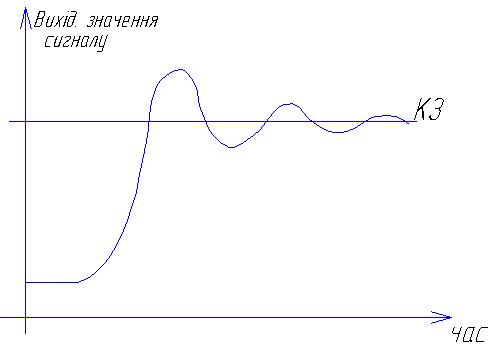
Рисунок 3.3- Перехідна характеристика лінійного перетворювача II порядку
Як видно із рисунка 3.3, перехідна характеристика біля К3 вихідного сигналу суттєво коливається з "кільцевою" частотою.
Максимальне
значення перехідної характеристики
називається піком
I-го
коливання.
Якщо чутливий елемент перетворювача
працює в режимі вільних коливань, то
його частота називається власною
кутовою частотою
![]() .
.
Час, напротязі якого вихідне значення коливається навколо кінцевого значення залежить від демпфування, яке прикладене до перетворювача.
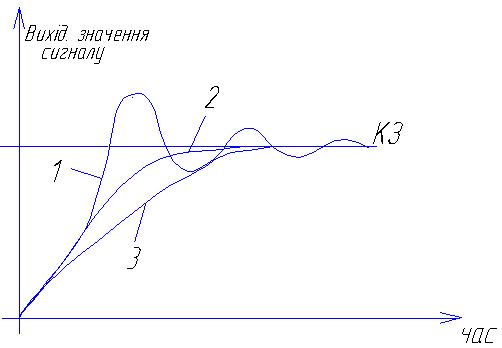
Рисунок 3.4 - Ефект демпфування вихідної перехідної характеристики лінійного перетворювача ІІ порядку
1 – недостатнє демпфування;
2 – критичне демпфування;
3 – передемпфування.
1 – дає таку ж характеристику перехідної характеристики, що і на рисунку 3.3;
3 – дає перехідну характеристику, що не коливається, але має значну постійну часу;
2 – досягає кінцевого значення за найшвидший час.
Відношення дійсного демпфування до степені демпфування, називається коефіцієнтом демпфування і позначається в; коли в=1, тоді крива 2;
в>1, тоді крива 3;
в<1, тоді крива 1.
Перехідна характеристика ІІ порядку описується коефіцієнтом демпфування в і власною кутовою частотою .
Перетворювачі I і ІІ порядків використовуються в залежності від характеру вимірюваної величини. Хоча вони і мають багато спільного, однак математичний опис їх перехідних характеристик різний.
Так диференціальне рівняння перехідної характеристики І порядку є
![]() ,
(3.1)
,
(3.1)
а другого порядку
![]() . (3.2)
. (3.2)
3. Зовнішні умови.
Вони визначають роботу приладу при зміні вимірюваної величини, наявності механічних переміщень або інших ефектах, які викликані зовнішніми факторами. Багато вимірювальних перетворювачів використовуються в умовах далеких від ідеальних. Тому при виборі або конструюванні ВП необхідно передбачити зміну умов, в яких він буде працювати.
Вплив температури на роботу приладу може бути завчасно відомо, а її значення вказується виготовлювачем для того, щоб інженер міг спроектувати необхідну схему компенсації або скоректувати кінцевий результат вимірювальної системи. Аналогічним чином впливають на результат вимірювань вібрації, прискорення, зміна зовнішнього тиску, або неточний монтаж перетворювача.
Корозія під дією солей, кислот може вплинути на кінцевий результат вимірювань, якщо корпус ВП незахищений відповідним чином.
Локальне електромагнітне поле також може впливати на перетворювач і схеми їх з'єднань з вимірювальною системою.
4. Надійність ПВП
Надійністю ПВП називають його властивість безвідмовно виконувати свої функції при збереженні основних характеристик. Надійність ПВП визначається надійнісними характеристиками, параметрами ПВП, способом з”єднання елементів ПВП, способами експлуатації та навантаженням його (навантаження визначається інтенсивністю процесів, що відбуваються в ПВП – струмових, теплових, механічних, тощо, і інтенсивністю зовнішніх збурювань – вологості, температури, механічних діянь, електромагнітних, радіаційних полів, тощо), що діють на ПВП і його елементи.
Надійність ПВП фізичної величини характеризується ймовірністю безвідмовної його роботи впродовж визначеного часу. Надійність Р ПВП поділяють на технічну Рт та метрологічну Рм:
 (3.3)
(3.3)
де
![]() - функція Лапласа; Тм
та
- функція Лапласа; Тм
та
![]() -
математичне очікування та дисперсія
розподілу часу поступового збільшення
похибок ПВП;
-
математичне очікування та дисперсія
розподілу часу поступового збільшення
похибок ПВП;
![]() -
інтенсивність раптових відмов ПВП.
-
інтенсивність раптових відмов ПВП.
Для визначення параметрів наведеної теоретичної моделі надійності ПВП потрібні експериментальні дані , які визначають найчастіше для деякої кількості ПВП даного типу. тому вирази для Р, Рт та Рм, хоч і характеризують усереднений ПВП, є корисними, оскільки вони показують тенденціївпливу конструктивних і схемних параметрів ПВП на його надійність.
Загальними типами відмов є наступні:
1.Деградаційні відмови.
Раптові відмови.
Постійні відмови.
Часткові відмови.
Повні відмови.
Катастрофічні відмови.