

5.2 Вимірювальні кола параметричних перетворювачів
Для роботи з параметричними перетворювачами використовують вимірювальні кола як з постійним, так і змінним струмом. Опір параметричного перетворювача є функцією вимірюваної величини R=f(x) і визначається як R=R0+R(x).
Характеристиками
параметричного
перетворювача є допустима потужність
Рідоп,
початковий опір
R0
і відносна зміна
опору
![]() .
.
З параметричними перетворювачами використовуються три види вимірювальних кіл: кола послідовного включення, кола у вигляді дільників і кола у вигляді мостів.
Залежність ефективності перетворення для параметричних перетворювачів визначається за формулою
![]() . (5.5)
. (5.5)
Вимірювальні
кола послідовного включення і кола у
вигляді дільників характеризуються
нелінійною залежністю між
![]() і
,
причому похибка лінійності буде тим
більша, чим більше
.
Похибка лінійності прямує до нуля при
і
,
причому похибка лінійності буде тим
більша, чим більше
.
Похибка лінійності прямує до нуля при
![]() .
.
На продемонстрована залежність зміни коефіцієнта перетворення від коефіцієнта а.
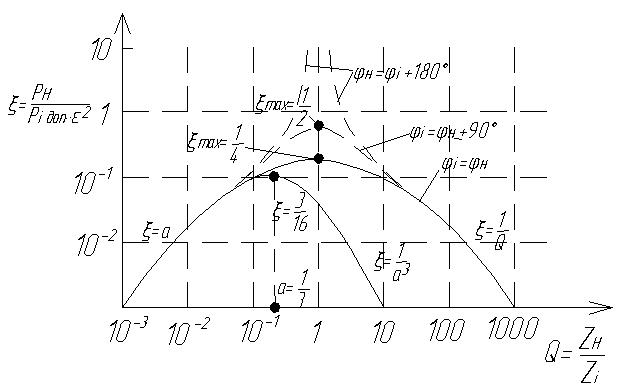
Рисунок 5.2 - Залежність зміни коефіцієнта перетворення від коефіцієнта а
Основним недоліком як кіл послідовного
включення, так і кіл у вигляді дільників
є те, що значенню х=0 відповідає
вихідна напруга
![]() .
Цей недолік при вимірюванні змінних
величин усувається використанням
вимірювальних кіл з розподільним
конденсатором.
.
Цей недолік при вимірюванні змінних
величин усувається використанням
вимірювальних кіл з розподільним
конденсатором.
5.3 Вимірювальні кола у вигляді незрівноважених мостів
Основна ідея побудови незрівноважених мостових кіл полягає в початковій компенсації початкового вихідного сигналу, щоб при х=0 він дорівнював нулю. Для цього до дільника R1,R2 (де R1 – перетворювач) додається, ще один дільник R3,R4 з тим ,щоб UH та RH і струм IH через RH при х=0 були відсутні.
При відхиленні х від 0 і R1=R0R міст виходить із стану рівноваги, внаслідок чого IH=f1(x) і UH=f2(x).
На приведена схема незрівноваженого моста.
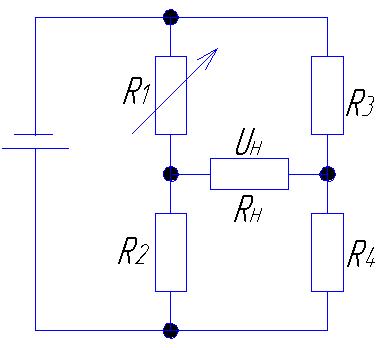
- Схема незрівноваженого моста
Основні властивості мостових незрівноважених кіл:
а) Стан рівноваги Ін=0 при х=а.
Умова
досягнення рівноваги є
![]() .
.
б) Вихідний струм
![]() ,(5.6)
,(5.6)
де Е – напруга живлення моста.
в) Функція перетворення незрівноваженого моста.
При
умові, що в стані рівноваги опори всіх
плеч дорівнюють
![]() (), при
заданій напрузі живлення
(), при
заданій напрузі живлення
![]() визначається виразом
визначається виразом
 . (5.7)
. (5.7)
Якщо відомий струм живлення моста, отримаємо
 . (5.8)
. (5.8)
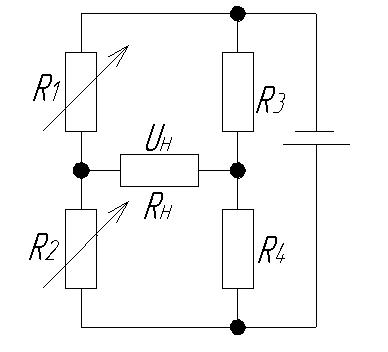
Схема незрівноваженого моста
Якщо в перетворювачі лінійно з вхідною величиною х змінюється провідність, наприклад, як в індуктивних перетворювачах зі змінним зазором, або ємність із змінною площею, то вихідний струм моста визначається за формулою
![]() ,(5.9)
,(5.9)
або
 . (5.10)
. (5.10)
г) Чутливість мостового кола по напрузі
При
малих змінах опору плеч (![]() ).
).
Для схеми на вихідна напруга рівна
![]() , (5.11)
, (5.11)
де - внутрішній опір перетворювача,
![]() - опір навантаження.
- опір навантаження.
д) Напруга джерела живлення визначається із допустимої потужності перетворювача:
для послідовно-симетричного моста ()
![]() , (5.12)
, (5.12)
для паралельно-симетричного моста
 . (5.13)
. (5.13)
е) Попереднє зрівноваження, калібрування і температурна корекція незрівноважених мостів показана на
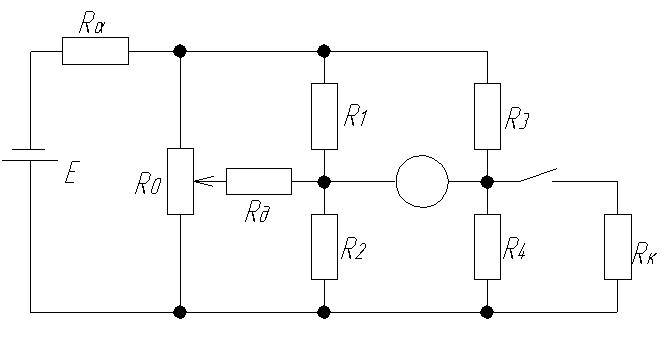
- Попереднє зрівноваження, калібрування і температурна корекція незрівноважених мостів
Оскільки
як перетворювачі в даній схемі
використовуються
![]() мають технологічні відхилення від
початкового опору, складений із них
міст повинен бути попередньо приведений
в стан рівноваги. Для цього служить
резистор
.
При положенні його повзунка в крайньому
верхньому положенні резистор
мають технологічні відхилення від
початкового опору, складений із них
міст повинен бути попередньо приведений
в стан рівноваги. Для цього служить
резистор
.
При положенні його повзунка в крайньому
верхньому положенні резистор
![]() є включений паралельно
є включений паралельно
![]() ,
а крайньому нижньому – паралельно
,
а крайньому нижньому – паралельно
![]() .
Цим досягається можливість усунути
нерівновагу любого знаку.
.
Цим досягається можливість усунути
нерівновагу любого знаку.
Резистор
![]() призначений для калібрування чутливості
моста, оскільки його підключення
паралельно
призначений для калібрування чутливості
моста, оскільки його підключення
паралельно
![]() викликає
нерівновагу моста на наперед відому
величину.
викликає
нерівновагу моста на наперед відому
величину.
Резистор
![]() служить для температурної корекції
чутливості. Його опір визначається
виходячи із результуючої температурної
похибки всього датчика.
служить для температурної корекції
чутливості. Його опір визначається
виходячи із результуючої температурної
похибки всього датчика.
Наприклад, якщо датчик в цілому має додатну температурну похибку, то резистор , виконаний з міді і який буде знаходитися при тій самій температурі, що і датчик, буде збільшувати свій опір і тим самим зменшувати струм моста.