

1.10. Храповые механизмы.
Храповые механизмы относятся к механизмам прерывистого действия, которые обеспечивают движения ведомого звена в одном направлении с периодическими остановками. Конструктивно храповые механизмы делятся на нереверсивные с внутренним зацеплением и с храповым колесом, а также реверсивные в виде зубчатой рейки.
Нереверсивный храповый механизм с внутренним зацеплением (рис. 1.14). Ведущим звеном может быть как храповое колесо внутреннего зацепления /, соединенное с зубчатым колесом внешнего зацепления, так и втулка 4 с закрепленной на ней собачкой 3, подпружиненной к зубьям храпового колеса 1 пружиной 2.
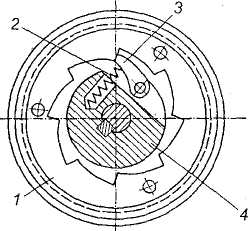
Рис. 1.14. Нереверсивный храповый механизм с внутренним зацеплением:
1 — храповое колесо; 2 — пружина; 3 — собачка; 4 — втулка
В нереверсивных механизмах (рис. 1.15) храповое колесо выполняют в виде рейки 1 в направляющих, и тогда собачка 2 сообщает рейке с храповым зубом прерывистое прямолинейное движение. В этом случае предусматривает устройство, которое возвращает рейку в начальное положение.
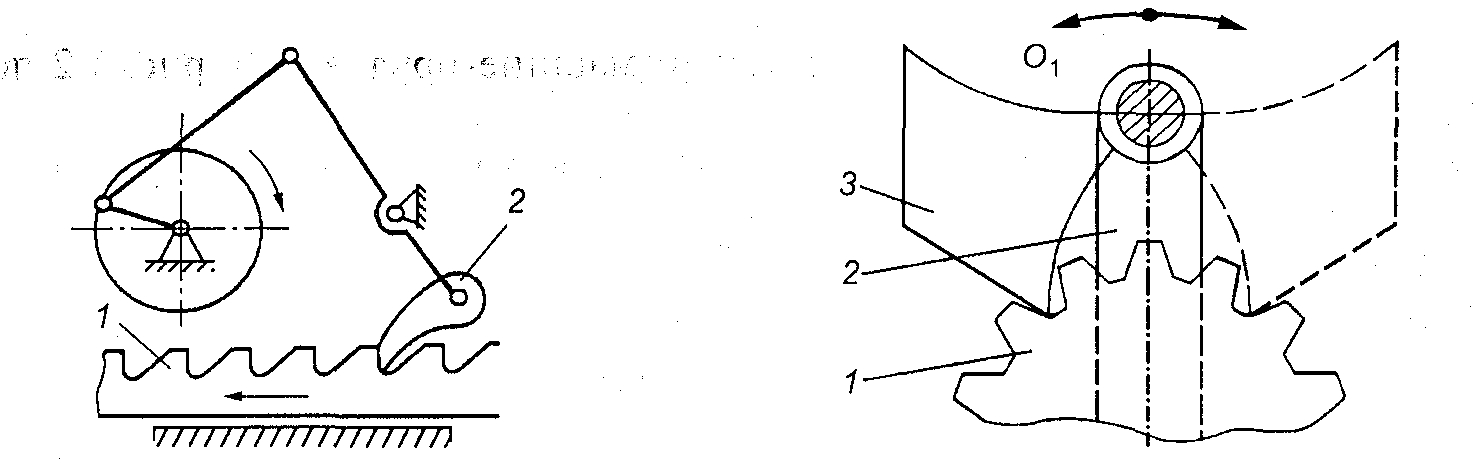
Рис. 1.15. Нереверсивный храповый механизм: Рис. 1.16. Реверсивный храповый механизм:
1 — рейка; 2 — собачка 1- храповик; 2 — ведущий рычаг; 3 — собачка
Реверсивные храповые механизмы (рис. 1.16) имеют: храповое колесо 1 с зубьями эвольвентного профиля, а на ведущем рычаге 2 шарнирно устанавливают собачку 3, которую при необходимости реверса перебрасывают вокруг оси Ох.
В машино- и приборостроении применяют храповые механизмы, в которых механизм (ведомое звено) двигается в одном направлении с периодическими остановками (металлообрабатывающие станки, задняя ведущая втулка у велосипеда и др.).
1.11. Мальтийский механизм (крест).
Мальтийские кресты широко применяются в машинных автоматах. Они относятся к механизмам прерывистого действия и предназначены для преобразования равномерного вращения ведущего звена в периодические с остановками ведомого звена, работают плавно без ударов (в отличие от храповых механизмов).
Наиболее распространенные мальтийские механизмы с внешним зацеплением (рис. 1.17). Такой механизм состоит из ведущего кривошипа 7, ролика 2 на его конце, мальтийского креста 3. При вращении кривошипа 1 ролик 2 входит в паз 4 мальтийского креста 3 и возвращает его на заданный угол. После выхода ролика 2 из паза 4 угловое положение мальтийского креста фиксируется цилиндрической поверхностью диска.
Мальтийские механизмы проектируются с числом пазов мальтийского креста, равным 3 + 12. Расчеты храповых механизмов на прочность проводятся в зависимости от вращающего момента на вале храпового колеса.
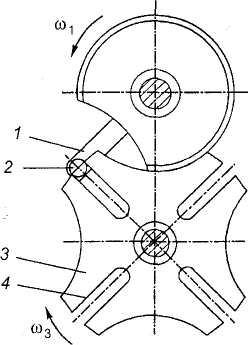 Рис.
1.17. Мальтийский механизм: 1
—
ведущий кривошип;
Рис.
1.17. Мальтийский механизм: 1
—
ведущий кривошип;
2 — ролик; 3 - мальтийский крест; 4 - паз мальтийского креста
Ответы на вопросы
1.1. Машина-орудие воспринимает энергию, которая затрачивается на преодоление внешних сил, непосредственно связанных с процессом производства, а машина-двигатель превращает энергию и передает ее через передаточный механизм (например, редуктор) машине-орудию. На рис. 1.2 передача — поз. 3—4—6.
1.2. На рис. 1.2 показана передача зацеплением, с гибкой связью и параллельными валами.
1.4. Рис. 1.18.
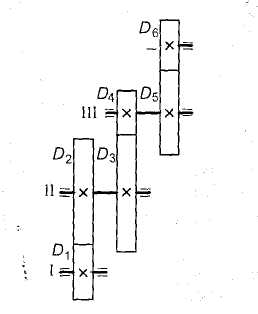
Рис. 1.18. Трехступенчатая передача
1.5. и =D2/D1 = ω1/ω2 (это без учета скольжения).
1.6. Если известна мощность Р и угловая скорость со, то вращающий
момент
Т
=
Р/ω Н • м. Отсюда на ведущем валу
![]() ,
на
ведомом
,
на
ведомом
![]() ,
,
т. е. P1=T1ω1, P2=T2ω2.
Подставив значения Pt и Р2 в формулу для определения КПД, получим
T2ω2=T1ω1η,
откуда
![]() .
.
Передачи вращательного движения служат не только для преобразования скоростей и передачи энергии, но и для преобразования моментов Т2=Т1uη.
Если
известны вращающие моменты, то
передаточное число
![]() .
.