

4.2. Алгоритмы расчета многокритериальных и многоатрибутных показателей качества окружающей среды
4.2.1. Алгоритмы кластеризации лесных массивов
В предыдущем разделе описана методика получения таблиц интегральных индексов с нижними и верхними пределами (см. раздел 4.1). Каждый элемент таблицы представляет собой интегральный индекс в виде нечеткого симметричного числа.
Для ранжирования и кластеризации земельных участков, покрытых лесом по экологическим показателям необходимо рассчитать показатели качества экосистемы соответствующего участка, выраженное в системе нечетких интегральных индексов. Дальнейшая кластеризация проводится в три этапа: для центров интегральных индексов, а также отдельно для нижней и верхней границ нечеткости интегральных индексов. В результате альтернативы (земельные участки) группировались в нечеткие кластеры (или классы). Известно, что классификация включает два основных метода: неконтролируемая классификация без обучения (кластеризация) и контролируемая классификация с обучением.
При неконтролируемой классификации объекты объединяются в отдельные кластеры, отличающиеся друг от друга по величине выбранных показателей. При наличии только двух показателей результат кластеризации может быть наглядно представлен на координатной плоскости. В настоящее время разработано достаточно большое количество алгоритмов кластеризации с использованием, как четких, так и нечетких методов обработки. Эти алгоритм1"' можно разделить на три больших класса: эвристические, иерархические и разделительные. Последний класс наиболее часто используется для кластеризации изображений..
Кластерный анализ основан на понятиях плотности объектов, которая и кластера выше, чем вне его, на понятиях дисперсии, отделимости от их кластеров, формы (например, кластер может иметь очертания гиперсферы, гиперэллипсоида), размера и пр. Методы кластеризации делятся на агломеративные и дивизивные. В агломеративных, или объединительных методах Л исходит последовательное объединение наиболее близких объектов в один тер. процесс такого последовательного объединения можно представить физически в виде дендрограммы, или дерева объединения. Это удобное представление позволяет наглядно изобразить процесс кластеризации, выполняемый агломеративными алгоритмами.
Исходными данными для анализа могут быть собственно объекты и их параметры, например, интегральные индексы, категория земель, состав насаждений возраст, диаметр, полнота, тип леса и др. В некоторых случаях данные для анализа удобно представлять матрицей расстояний между объектами, в которой на пересечении строки с номером i и столбца с номером о записано расстояние между 1-м и_)-м объектом. При отсутствии матрицы расстояний агломеративные алгоритмы начинают свою работу с вычисления расстояний между объектами. Расстояние между объектами в пространстве параметров является одной из многих мер сходства между объектами: чем меньше расстояние между объектами, тем они более схожи. При определении расстояний важную роль играет выбор метрики. Часто используют обычную евклидову метрику, например, если объект описывается двумя параметрами, то он может быть изображен точкой на фазовой плоскости, а расстояние между объектами — это расстояние между точками, вычисленное по теореме Пифагора. Если не возводить в квадрат координаты вектора, а использовать их абсолютные значения то получится так называемое манхэттенское расстояние, или расстояние «городских кварталов».
Для некоторых задач евклидова метрика может оказаться вовсе неподходящей. В этих задачах используется понятие меры сходства объектов (расстояние - одна из возможных мер сходства). Важной мерой сходства, которая традиционно используется в статистике, является статистический коэффициент корреляции, например, коэффициент корреляции Пирсона.
Для бинарных данных используют другие меры сходства, например, вычисляют количество параметров, которые совпадают у объектов, а затем полуденный результат делят на общее число параметров и получают меру сходства. Такие меры называют коэффициентами ассоциативности. Из этих коэффициент наиболее популярны коэффициенты Жаккара и Гауэра.
При анализе результатов кластеризации необходимо учитывать особенно-использованных алгоритмов. В агломеративных методах применяются алгоритмы: одиночных связей, полных связей, средних связей и алгоритм Уорда. алгоритма Уорда состоит в том, чтобы проводить объединение, дающее минимальное приращение внутригрупповой дисперсии. Алгоритм Уорда при-т к образованию кластеров примерно равных размеров и имеющих форму гиперсфер.
В некоторых алгоритмах кластеризации при отнесении объекта к очередному кластеру используются интегральные характеристики кластеров. Примером таких методов является итеративный алгоритм к-средних. В алгоритме к-средних вводится понятие центра кластера. Под расстоянием между объектом и кластером понимается расстояние между объектом и центром кластера. Классифицируемый объект относится к тому кластеру, расстояние до которого минимально. Обычно под расстоянием понимается евклидово расстояние, то есть объекты рассматриваются как точки евклидова пространства. Алгоритм к-средних состоит из следующих шагов:
Задается начальное разбиение данных на кластеры (число кластеров определяется пользователем). Затем вычисляются координаты центров кластеров.
Вычисляются расстояния от объектов до центров кластеров, в результате чего объекты перераспределяются по кластерам.
Вычисляются центры вновь образованных кластеров.
4) Шаги 2, 3 повторяются до тех пор, пока не будет найдена стабильная конфигурация, при которой кластеры перестанут изменяться, или число итераций не превысит заданное пользователем предельное значение.
Большую популярность в последнее время получили нечеткие алгоритмы, среди которых особенно широко известен алгоритм под названием «нечетких средних» - FСМА. Следует отметить, что главным недостатком алгоритмов к- и с-средних является необходимость априорного задания требуемого числа кластеров, а также других численных параметров, от величины которых существенно зависят результаты кластеризации. Из этого следует что, при использовании алгоритмов кластеризации необходимо иметь дополнительные критерии качества разделения объектов на кластеры, позволяющие численно оценить результат применения тех или иных параметров. Наиболее известные оценки качества кластеризации получили название коэффициентов кластеризации и энтропии.
Важной характеристикой алгоритма нечетких с-средних является то, что в результате его применения формируются нечеткие кластеры. При этом степень принадлежности объекта кластеру описывается с помощью функции принадлежности. Рассмотрим сущность алгоритма нечетких с-средних. Пусть X = {х1,х2,...,хп} заданная система из -векторов в пространстве признаков. При этом хkj - jя компонента к-го вектора, соответствующая j-му параметру. При нечеткой кластеризации не существует жесткого деления на классы, при которой каждый вектор принадлежит только одному классу. Вместо этого вводятся степени принадлежности вектора каждому классу, которые называются функцией принадлежности (ФП): и1к = ик /,(xk), где i= 1,с, с - число классов. Функция
принадлежности должна удовлетворять условию нормировки: ∑Uik=1для всех k
Функция принадлежности заключает в себе гораздо больше полезной информации, чем четкое разделение на классы. Так, например, при делении на три а объект, ФП которого примерно равна {1/3, 1/3, 1/3}, может рассматри-101 я как неподдающийся классификации и, соответственно, не принадлежащий ни одному из кластеров.
Целевая функция (ЦФ), используемая в алгоритме РСМА, имеет следующий вид:

![]()
(4.16)
где с! - расстояние в пространстве признаков между объектом к и центром
1-го кластера, т - параметр алгоритма.
Таким образом, ЦФ представляет собой сумму квадратов расстояний от всех объектов до центров кластеров, которая должна быть минимальной, т. е. ЦФ (4.16) является нечетким аналогом метода наименьших квадратов. Случай ш=0 соответствует алгоритму четкой кластеризации - жестких с-средних НСМА. Наилучшим решением задачи (4.16) является следующее:
(4.17)
Из формул (4.17) следует, что центры кластеров рассчитываются, как средние арифметические, а функция принадлежности строится из отношений, показывающих на сколько объект к ближе к 1-му кластеру, чем к остальным.
Для расчета центров кластеров Vi по формулам (4.17) требуется предварительно рассчитать функции принадлежности Uik , которые в свою очередь требуют знания Vi;. Решение может быть найдено методом последовательных приближений.
К сожалению, алгоритмы нечетких средних (4.17) отсутствуют во многих популярных пакетах кластеризации и классификации.
Рассмотрим теперь преимущества и недостатки алгоритма контролируемой классификации (классификации с учителем). При контролируемой классификации используются предварительно классифицированные опытным путем данные, которые составляют обучающую выборку. В результате обработки этих данных рассчитываются некоторые интегральные характеристики классов. Эти характеристики далее используются в процедуре классификации.
Подчеркнем, что успешность и эффективность алгоритма классификации с учителем в первую очередь определяется качеством и надежностью обучающей выборки, во-вторых - разделимостью используемых интегральных показателей и' в-третьих, эффективностью алгоритмов классификации. Так, например, в численных экспериментах, в случае использования плохо определенной обучающей выборки наблюдалась неудовлетворительная сходимость итерационного процесса обучения одного из мощнейших классификаторов - искусственной нейронной сети (ИНС).
В настоящее время ИНС все чаще используются для классификации и кластеризации объектов различного типа. Особенностью ИНС-алгоритмов является высокое требование, предъявляемое к быстродействию и оперативной памяти компьютеров в процессе обучения ИНС.
ИНС состоит из большого числа обрабатывающих элементов или нейронов, организованных в иерархические слои, в которых выходная переменная одного нейрона является входной переменной следующего нейрона. Нейронные сети различаются способом соединения нейронов между собой и конструкцией промежуточных слоев. Типичная нейронная сеть включает входной слой, промежуточные скрытые слои и выходной слой. Пример нейронной сети показан на рис.4.
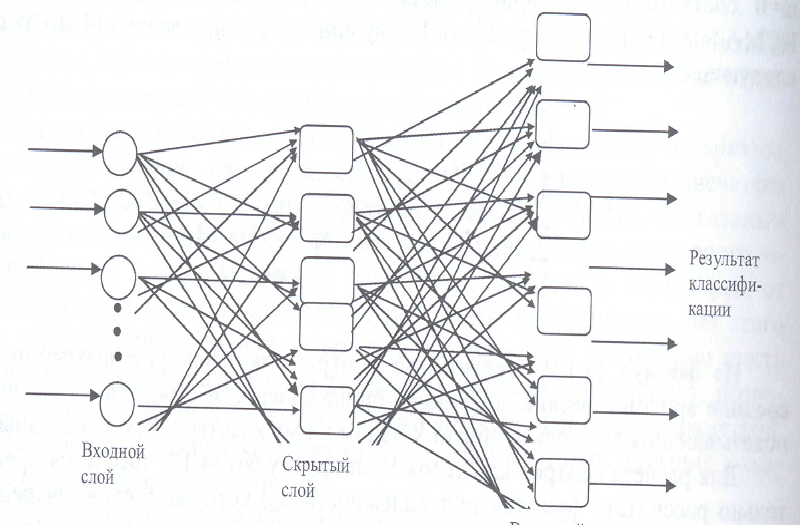
Рис.4.5. Блок-схема использованной для классификации искусственной нейронной сети прямого распространения с алгоритмом обратного распространения ошибки: Размер ИНС: 5x7 нейронов
Поясним работу ИНС на примере простейшей нейронной сети с к входными нейронами, одним скрытым слоем с р нейронами и выходным слоем, состоящим из одного нейрона. Каждый нейрон скрытого слоя получает сигнал от нейронов входного слоя в следующем виде:Ij=∑ Wij*, Xi, где i - номер узла входного слоя, j - номер узла скрытого слоя, Xi, - сигнал от i-го нейрона входного слоя, Wij - весовые коэффициенты связи нейронов скрытого и входного слоев. Входной сигнал нейрона скрытого слоя Ij может быть преобразован в выходной сигнал Vj при помощи различных нелинейных функций. Чаше других пользуется логистическое преобразование с монотонно возрастающим от нуля до единицы выходным сигналом следующего вида:

Выходной нейрон суммирует входные сигналы от нейронов скрытого слоя нормализует результат при помощи собственной передаточной функции. Обучающая выборка, включающая входные и известные результирующие выходные данные, используется для настройки весовых коэффициентов сети, т.е. для обучения ИНС. При этом данные, полученные с выходного слоя, сравниваются с заранее известными результатами, и рассчитывается ошибка рассогласования.
Эта ошибка передается по алгоритму нейронной сети в обратном направлении, что позволяет корректировать весовые коэффициенты в соответствии с используемым в данной ИНС алгоритмом минимизации. Эта процедура настройки весовых коэффициентов и называется обучением ИНС. Процесс обучения заканчивается либо при уменьшении ошибки рассогласования ниже заданного порога, либо при выходе итерационного процесса на установившийся режим. В случае нечетких образов, характерных для космических изображений лесов, нейронные сети могут быть эффективны лишь при условии использования большого количества нейронов.
Как для контролируемой, так и для неконтролируемой классификации в качестве критериев разделения могут быть использованы различные показатели. Исходными показателями могут быть множества исходных измеряемых показателей объекта. Эти показатели могут применяться как в исходном виде, так и в виде более сложных комбинаций, например интегральных индексов и пр. При применении контролируемой классификации эти показатели должны быть рассчитаны для каждого класса обучающей выборки. Таким образом, отклонение характеристик объекта от интегральных характеристик кластера или класса может быть представлено в виде следующего много компонентного вектора, который назовем вектором рассогласования:

где аi(k) - 1-я компонента к-о кластера, bi- характеристика объекта, n- количество показателей, использованных для классификации.
Компоненты вектора рассогласования используются для построения различных критериев и алгоритмов классификации. Самым простейшим и наиболее часто используемым на практике является линейная комбинация:
 (4.19)
(4.19)
Где Wj - весовые коэффициенты, характеризующие приоритет соответствующего показателя. Линейные преобразования могут быть представлены в виде декомпозиции двух последовательных преобразований: подобия и поворота. Преобразование подобия изменяет длину радиуса-вектора объекта (в пространстве признаков), а преобразование поворота - поворачивает радиус-вектор. При этом распознаваемый объект перемещается в пространстве признаков, удаляясь от одних кластеров и приближаясь к другим.
Аналогичный преобразователь используется при построении нелинейных ИНС:
где f[...] - нелинейный преобразователь логистического (или ступенчатого) типа
Кроме простых рассогласований типа (4.18) в задачах классификации могут быть использованы и более сложные комбинации.
Так вместо (4.18) хорошие результаты могут быть получены введением нормированных отклонений посредством деления абсолютных отклонений на стандартные отклонения соответствующих эталонов, т.е. с использованием нелинейных комбинаций показателей, в которых один из показателей будет находиться в знаменателе.
В качестве критериев рассогласования часто применяют эвклидовы расстояния. В общем виде (с учетом весовых коэффициентов) критерий эвклидовых расстояний может быть представлен следующим образом:

Этот критерий имеет наглядный геометрический смысл. Однако он может быть заменен любыми нелинейными преобразованиями, которые в ряде случаев являются более эффективными. К числу таких преобразований следует в первую очередь отнести расстояния Минковского или расстояния городских кварталов, а также преобразования по законам нормального или экспоненциального распределения.
Так, например, можно использовать критерий нормального распределения, который имеет следующий вид:
 (4.22)
(4.22)
В случае необходимости получения иерархичной структуры кластеров применяются субтрактивные алгоритмы, например из пакета Матлаб. На начальном шаге работы алгоритма каждая запись базы данных (точка в пространстве параметров) принимается в качестве потенциального центра будущих кластеров. Далее при помощи выбранной потенциальной функции определяется точка с наибольшим потенциалом, которая принимается центр кластера. Важными параметрами алгоритма кластеризации, которые играют ведущую роль при кластеризации, являются радиусы кластера, которые задаются по каждому параметру отдельно. Все точки, расположенные вблизи выбранного центра кластера на расстоянии меньшем радиуса, не могут быть центрами других кластеров. Среди остальных точек вновь определяется точка с наибольшим потенциалом, которая и становиться центром второго кластера. Эта процедура повторяется до тех пор, пока не будут исчерпаны все точки базы
данных.
Потенциал точки рассчитывается по следующей формуле:

где Рj - потенциал j-й точки, xk(p) - р-я координата k- й точки, г(p) - радиус
кластера вдоль р-й координаты.
Центром кластера становится точка с наибольшим значением Рj. Кроме радиусов в алгоритме вводятся еще три параметра:
Squash -фактор - коэффициент, на который умножаются радиусы, для того чтобы в случае необходимости подобным образом изменять размеры кластеров, не меняя при этом исходных пропорций между ними.
Ассерt-фактор - устанавливает верхнюю границу в долях исходного потенциала, только выше которой другая точка может стать центром нового кластера.
Реjесг-фактор - устанавливает нижнюю границу в долях исходного потенциала, ниже которой другая точка не может стать центром нового кластера.
В программе Матлаб, реализующей алгоритм, имеется вспомогательное окно, в котором могут быть представлены двухмерные сечения многомерных данных. Кроме того возможно использование не только алгоритма Sиbtrасtivе, но и алгоритма FСМА. В качестве X и Y координат двухмерных сечений могут быть заданы любые показатели качества природной среды.
В настоящее время
особенно популярным является использование
для целей кластеризации самоорганизующихся
ИНС. Эти сети были разработаны Центром
исследований искусственных нейронных
сетей и Лабораторией информационных
и компьютерных исследований Технологического
университета города Хельсенки (Финляндия)
и получили название самоорганизующихся
нейронных сетей Кохонена. На сайте:
www.cis.hut.fi/research
имеется пакет прикладных программ
самоорганизующихся сетей (SОМ
– Seft
organizing
mар),
предоставленный Центром исследований
ИНС для свободного пользования. Кроме
того, в пакете Матлаб имеется достаточно
хорошо зарекомендовавшая с ебя
реализация данного
алгоритма.
ебя
реализация данного
алгоритма.
В своей простейшей форме сеть Кохонена функционирует по правилу «победитель получает все». Для данного входного вектора один и только один нейрон Кохонена выдает логическую единицу, все остальные выдают ноль. Выход каждого нейрона Кохонена является просто суммой взвешенных элементов входных сигналов:

где Sj — выход j-ro нейрона Кохонена; Wj = (w1j, w2j,... wnj) - вектор весов j-го нейрона Кохонена; X = (x1i,X2i,.., х„) - вектор входного сигнала, или в вектор-но-матричной форме:

где S — вектор выходов слоя Кохонена.
Нейрон Кохонена с максимальным значением Sj является «победителем». Его выход равен единице, у остальных нейронов он равен нулю.
Обучение слоя Кохонена осуществляется следующим образом. Слой Кохонена классифицирует входные векторы в группы схожих векторов. Это достигается с помощью такой подстройки весов, что близкие входные векторы активизируют один и тот же нейрон данного слоя.
Слой Кохонена обучается без учителя (самообучается). В результате учения слой приобретает способность разделять несхожие входные векторы. Какой именно нейрон будет активизироваться при предъявлении конкретного входного сигнала, заранее трудно предсказать.
При обучении слоя Кохонена на вход- подается входной вектор, и вычисляются его скалярные произведения с векторами весов всех нейронов. Скалярное произведение является мерой сходства между входным вектором и вектором весов. Нейрон с максимальным значением скалярного произведения объявляется «победителем», и его веса подстраиваются (весовой вектор приближается к входному). Уравнение, описывающее процесс обучения, имеет вид:
![]()
где wn - новое значение веса, соединяющего входной компонент х с выигравшим нейроном, ws - предыдущее значение этого веса,n - коэффициент скорости обучения.
Каждый вес, связанный с выигравшим нейроном Кохонена, изменяется пропорционально разности между его величиной и величиной входа, к которому он присоединен. Направление изменения минимизирует разность между весом и соответствующим элементом входного сигнала.
Коэффициент скорости обучения n вначале обычно полагается равным 0,7 и может затем постепенно уменьшаться в процессе обучения. Это позволяет делать большие начальные шаги для быстрого грубого обучения и меньшие шаги при подходе к окончательной величине.
Если бы с каждым нейроном Кохонена ассоциировался один входной вектор, то слой Кохонена мог бы быть обучен с помощью одной коррекции на вес (n = 1)- Как правило, обучающее множество включает много сходных между собой входных векторов, и сеть должна быть обучена активизировать один и тот же нейрон Кохонена для каждого из них. Веса этого нейрона должны получаться усреднением входных векторов, которые должны его активизировать.
При необходимости включения в число критериев качества ОПС (интегральных индексов) дополнительных экспертных оценок следует использовать манхэттенскую метрику, так как при сравнении двух лингвистических оценок обычно используют их численные аналоги, что лучше соответствует манхэттенской метрике.
Главным результатом на данном этапе является редукция разнородных данных по доза-эффект зависимостям в систему однородных комплексных интегральных оценок качества ОПС, которые намного надежнее при их использовании для целей кластеризации.
Следует отметить, что, несмотря на важное значение, которое имеет процедура кластеризации, т.е. разделения покрытых лесом участков на отдельные кластеры, большой интерес представляет изучение и анализ дерева классов (дендрограммы). Дендрограмма позволяет исследовать степень подобия участков, попадающих в различные соседние кластеры. Информация о подкластерах данного кластера позволяет вводить дополнительную дифференциацию участков внутри кластера. С другой стороны вхождение конкретного кластера в кластеры более высокого уровня позволяют оценить сходство между отдельными кластерами.