

4. Чувствительные элементы (преобразователи)
Любое устройство автоматики должно иметь информацию о состоянии контролируемого объекта. Это возможно с помощью чувствительных элементов (преобразователей). Преобразователи служат воспринимающими (чувствительными) органами других элементов, например, датчиков. Преобразователи, реагируя на изменения входного сигнала, как правило, преобразуют его в величину другой физической природы, которую удобно подвергать дальнейшей обработке (частоту вращения - в напряжение; перемещение - в сопротивление или напряжение; уровень жидкости - в сопротивление или напряжение и т.д.).
В зависимости от физической природы входного сигнала все преобразователи делятся на две группы: преобразователи электрических величин и преобразователи неэлектрических величин. В зависимости от физической природы выходного сигнала преобразователи делятся на электрические и неэлектрические. В зависимости от принципа действия - на параметрические и генераторные.
4.1. Основные характеристики преобразователей
Преобразователи,
как элементы, характеризуются параметрами
и характеристиками, описанными выше.
С учетом специфики этих эле- ментов к
числу основных их характеристик относятся
следующие. 1.Статическая
характеристика управления
![]() .
.
2. Чувствительность.
3. Динамические характеристики [переходная функция h(t), импульсная переходная функция u(t), АФЧХ].
4. Погрешность преобразования.
5. Максимальная мощность выходного сигнала.
6. Диапазоны изменения входного и выходного сигналов.
4.2. Параметрические преобразователи
Этот вид преобразователей используют для преобразования неэлектрических величин (перемещений, давления, механических напряжений, температуры, освещенности и т.д.) в параметры электрических цепей: сопротивление, индуктивность, емкость, взаимную индуктивность, напряжение. Для параметрических преобразователей требуются источники питания (рис. 4.1).

Рис. 4.1. Параметрические преобразователи:
хлу- входной и выходной сигналы;
Из - источник электроэнергии
Все параметрические преобразователи, в зависимости от принципов их действия, делятся на несколько видов:
1. Резисторные.
2. Индуктивные.
3. Трансформаторные.
4. Емкостные.
4.2.1. Резисторные преобразователи
К этому виду преобразователей относятся: потенциометрические, тензометрические, терморезисторные, угольные, фоторезисторы.
Потенциометрические преобразователи (потенциометры)
Широко применяются проволочные потенциометрические преобразователи. Потенциометры могут выполняться из разных материалов: медный обмоточный провод, различные металлические пленки, в том числе полупроводники и т.д. Принцип действия простейшего потен-циометрического преобразователя представлен на рис. 4.2.
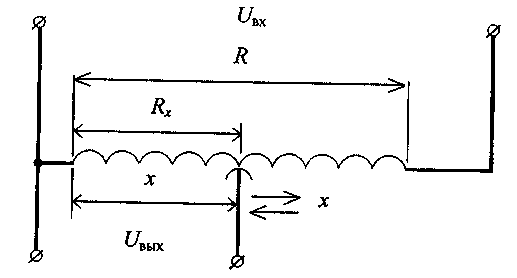
Рис. 4.2. Потенциометрический преобразователь:
Uвх - напряжение постоянного или переменного тока;
R - сопротивление потенциометра; х – перемещение
щетки; Rх - сопротивление потенциометра, соответст-
вующее перемещению х
Статическая характеристика потенциометра имеет вид
R,=Rf(x), (4.1)
Где f(х) - функция линейного или углового перемещения щетки (движка) потенциометра.
Графическое представление статической характеристики линейного потенциометра показано на рис. 4.3.

Рис. 4.3. Статическая характеристика
линейного потенциометра:
1 - холостой ход; 2 - при наличии нагрузки
Существуют функциональные потенциометрические преобразователи (рис. 4.4).

Рис. 4.4. Функциональный
потенциометрический
преобразователь

Рис. 4.5. Статическая характеристика
функционального потенциометриче-
ского преобразователя
Для реализации других видов функций необходимо изменять форму каркаса потенциометра.