

3.2. Виды типовых элементов (звеньев)
При анализе динамических процессов в отдельных элементах или устройствах автоматики в целом удобно пользоваться типовыми звеньями. С этой целью необходимо подобрать для каждого реального элемента соответствующее ему типовое звено. Типовые звенья хорошо описаны в справочной литературе и их анализ как индивидуальный, так и в составе системы значительно упрощается. Основные виды типовых звеньев изложены ниже.
1. Апериодическое (инерционное) звено (рис. 3.6).
Дифференциальное уравнение и передаточная функция апериодического звена представлены выражениями (3.25) и (3.26).
(3.25) (3,26)
 (3.25),
(3,26)
(3.25),
(3,26)
где Т- постоянная времени апериодического звена; р - оператор Лапласа.
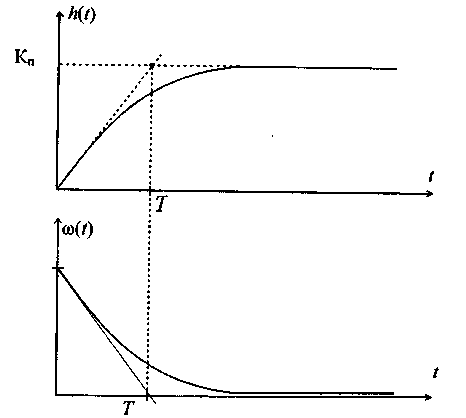
Рис. 3.6. Апериодическое звено
В момент времени t = О на вход этого звена подан ступенчатый сигнал. В качестве примеров апериодических звеньев можно привести следующие: RC-и RL-контуры, электро- или гидродвигатель, электрический генератор (входной сигнал - возбуждение, а выходной - ЭДС статорной обмотки).
2. Безынерционное звено (рис. 3.7).

Рис. 3.7. Безынерционное звено
Передаточная функция имеет вид
![]() (3.27)
(3.27)
Примерами таких звеньев могут служить: механический рычаг, редуктор, усилитель напряжения на электронных элементах без учета L и С и т.д.
3. Колебательное звено (рис. 3.8).
При подаче на вход этого звена ступенчатого сигнала выходной сигнал стремится к новому установившемуся значению, совершая относительно него затухающие колебания. Передаточная функция имеет вид
![]() (3.28)
(3.28)
где
![]() - коэффициент преобразования (по
статической характеристике);
- коэффициент преобразования (по
статической характеристике);
![]() - относительный коэффициент затухания.
- относительный коэффициент затухания.

Рис. 3.8. Колебательное звено
К такому виду звеньев относятся: RLC-контур (колебательный контур) и любой другой элемент, где есть не менее двух накопителей энергии, которые обмениваются ею в процессе колебаний.
4. Интегрирующее звено (рис. 3.9).
Уравнение, описывающее это звено, и передаточная функция имеют вид:
![]() ,
(3.29)
,
(3.29)
![]() .
(3.30)
.
(3.30)

Рис. 3.9. Интегрирующее звено
Примеры интегрирующих звеньев: счетчик электроэнергии, электродвигатели постоянного тока в период пуска (возмущение - напряжение на зажимах, реакция - скорость вращения).
5. Дифференцирующее звено (рис. 3.10).
Уравнение и передаточная функция:


Рис. 3.10. Дифференцирующее звено
Пример: датчики скорости и ускорения.
6. Усилительное (пропорциональное) звено.
Характерной особенностью этого звена является то, что сигнал на выходе в любой момент пропорционален входному сигналу:
![]() ;
(3.33)
;
(3.33)
![]() .
(3.34)
.
(3.34)
Примеры усилительных звеньев: безынерционный (электронный) усилитель, рычаг и т.д.
В реальных устройствах автоматики существует большое количество различных вариантов описанных выше звеньев. Все эти звенья вместе с их характеристиками изложены в специальной литературе.