

2.3. Основные параметры элементов
Элементы автоматики в установившемся (статическом) режиме характеризуются рядом параметров, большая часть из которых определяется по характеристике (функции) управления. Виды параметров отличаются для элементов с непрерывными и релейными характеристиками.
2.3.1. Параметры элементов с непрерывной характеристикой управления
1. Коэффициент преобразования (Кп).
Непрерывная характеристика (рис. 2.18) независимо от того, проходит она через «О» или нет, может быть представлена в виде простого уравнения
![]() ,
(2.7)
,
(2.7)
где х,у- входной и выходной сигналы.

Рис. 2.18. Непрерывная характеристика управления:
![]() ,
,![]() - наименьшее
и наибольшее значения входной величины,
соответствующие линейной части
характеристики;
- наименьшее
и наибольшее значения входной величины,
соответствующие линейной части
характеристики;
![]() ,
,
![]() - значения
выходной величины соответствующие
и
- значения
выходной величины соответствующие
и
Значение
![]() меняется в
зависимости от величины х,
т.е.
меняется в
зависимости от величины х,
т.е.
![]() .
.
Следовательно, уравнение (2.7) будет иметь вид
![]() (2.8)
(2.8)
Обычно пользуются дифференциальным коэффициентом преобразования
![]() ,
при
,
при
![]() ;
;
![]() ,
(2.9)
,
(2.9)
Физически представляет собой тангенс угла наклона касательной к функции управления (рис. 2.19).
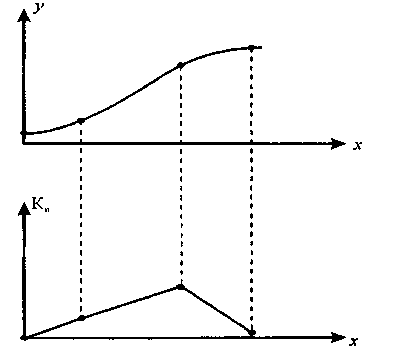
Рис. 2.19. Физический смысл
Линейная
характеристика имеет
![]() .
Для конкретных видов элементов
может называться по-другому, например:
для усилителя -коэффициент усиления,
для датчика - коэффициент чувствительности
и т.д.
.
Для конкретных видов элементов
может называться по-другому, например:
для усилителя -коэффициент усиления,
для датчика - коэффициент чувствительности
и т.д.
2. Коэффициент динамического диапазона .
![]() ,
(2.9)
,
(2.9)
где , -наибольшее и наименьшее значения выходного сигнала
(рис. 2.18).
3.
Коэффициент передачи мощности (![]() ).
).
![]() ,
(2.10)
,
(2.10)
где
![]() - изменение мощности выходного сигнала
в ответ на изменения мощности входного
.
- изменение мощности выходного сигнала
в ответ на изменения мощности входного
.
4.
Входное
![]() и выходное
и выходное
![]() сопротивления
(рис. 2.20).
сопротивления
(рис. 2.20).

Рис. 2.20. Входное и выходное сопротивления элемента
5. Линейность или нелинейность характеристики управления.
6. Ширина зоны нечувствительности.
7. Ширина зоны (петли) неоднозначности.
8. Область (зона) насыщения.
9. Порог чувствительности (разрешающая способность).
10. Погрешность (ошибка) для характеристик с неоднозначностью
(рис. 2.21).
![]() .
(2.11)
.
(2.11)

Рис. 2.21. Непрерывная характеристика управления
с петлей неоднозначности
На любой элемент могут действовать различные внешние факторы -возмущающие воздействия. В связи с этим выходной сигнал для элемента с непрерывной характеристикой управления может быть записан с учетом возмущающих воздействий:
![]() ,
(2.12)
,
(2.12)
![]() )
- возмущающие
воздействия;
)
- возмущающие
воздействия;
![]() - входной сигнал.
- входной сигнал.
Изменения выходного сигнала под действием входного сигнала и возмущений можно записать, используя приращения:
Введя обозначения парциальных коэффициентов преобразования
![]()
можно записать :
![]() .
(2.14)
.
(2.14)
Вынося
за скобки коэффициент преобразования
входного сигнала
![]() ,
получим
,
получим
![]() .
(2.15)
.
(2.15)
Из
(2.15) видно, что чем меньше значения
парциальных коэффициентов:
![]() ,
тем меньше
влияние на
,
тем меньше
влияние на
![]() соответствующих возмущающих
воздействий.
соответствующих возмущающих
воздействий.