

2.2. Характеристики управления элементов
Характеристика управления элемента (Э) определяет связь между выходным (v) и входным (х) сигналами.

Рис.2.7. К определению характеристики управления элемента
Любой элемент обладает инерционностью, поэтому выходной и входной сигналы связаны дифференциальным уравнением. В общем случае, все процессы, протекающие в элементах и системах, можно описать дифференциальным уравнением вида:
![]() (2.3)
(2.3)
где
х,у- входной
и выходной сигналы (величины); t
- время; f-
возмущающее воздействие (изменения
температуры, влажности, давления,вибрация,
изменения напряжения, тока и т.д.);
![]() - производные
от x;
- производные
от x;
![]() -производные от y;
-производные от y;
![]() - производные от f.
- производные от f.
При отсутствии возмущающего воздействия или при его значении близком к нулю, уравнение (2.1) примет вид
![]() .
(2.4)
.
(2.4)
Для установившегося режима (статический режим) все производные будут равны нулю, и исходное уравнение (2.3) превращается в уравнение (2.5).
F(x,y)=0. (2.5)
Решение (2.5) относительно y позволит получить
y=F(x). (2.6)
Эта зависимость называется статической характеристикой управления элемента или просто статической характеристикой элемента. Ниже приведены основные виды статических характеристик наиболее распространенных элементов (рис. 2.8-2.16).
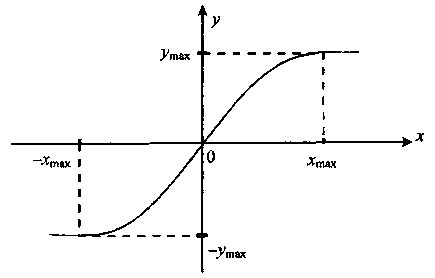
Рис. 2.8. Характеристика с насыщением элемента
(магнитные, электронные, электромашинные усили-
тели, электродвигатели с ограниченной скоростью
вращения и т.д.):
![]() и
и
![]() -
максимальноe значeние входного и выходного
-
максимальноe значeние входного и выходного
сигналов;
![]() ,
,![]() - зона
насыщения
- зона
насыщения
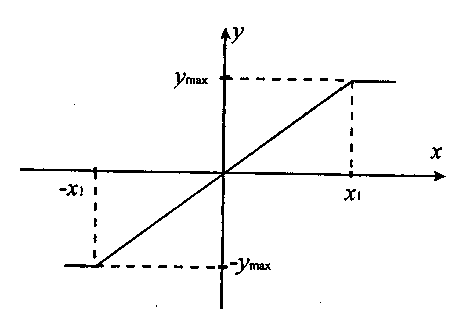
Рис. 2.9. Характеристика с ограниченной зоной
линейности (эта характеристика является идеализированной
характеристикой с насыщением рис. 2.8):
![]() -
зона насыщения
-
зона насыщения

Рис. 2.10. Линейная характеристика с зоной
нечувствительности (схемы с диодами, электродвигатели
с напряжением трогания, зависящим от момента сопротивления):
![]() -
зона нечувствительности;
-
зона нечувствительности;
![]() - порог чувствительности
- порог чувствительности
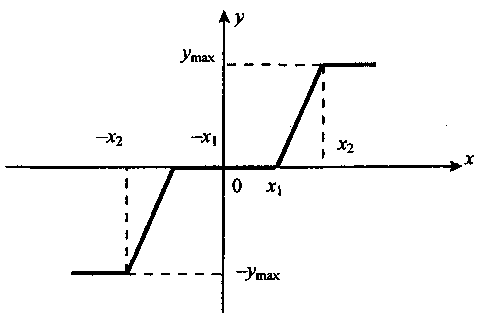
Рис. 2.11. Характеристика с зоной нечувствительности
и зоной насыщения (электродвигатели с ограниченной
скоростью вращения и напряжением трогания,
зависящим от момента сопротивления):
![]() -
зона
нечувствительности;
-
зона
нечувствительности;
![]() - зона насыщения
- зона насыщения
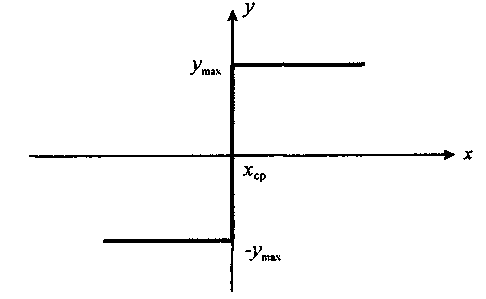
Рис. 2.12. Идеальная релейная характеристика
(все виды реле):
![]() -
параметр
срабатывания
-
параметр
срабатывания

Рис. 2.13. Релейная характеристика с зоной
нечувствительности:
-зона нечувствительности
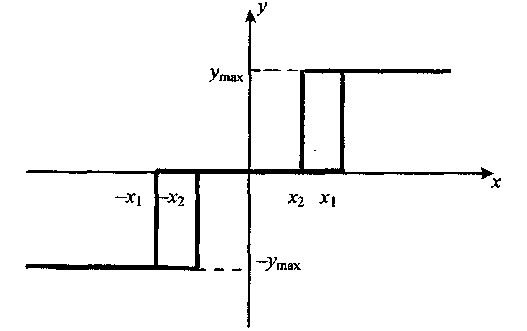
Рис. 2.14. Релейная характеристика с зонами
неоднозначности и нечувствительности:
![]() -зона
нечувствительности;
-зона
нечувствительности;
![]() -
-
зона неоднозначности
Выходная величина (у) у элементов с такими характеристиками зависит не только от входной (х), но и от направления изменения последней. Неоднозначность характеристики можно объяснить наличием внутренних потерь в элементе (трение, перемагничивание, нагревание и т.д.).

Рис. 2.15. Релейная характеристика с неоднозначностью:
- зона неоднозначности

Рис .2.16. Неоднозначная характеристика (элементы,
имеющие механический люфт или проскальзывание):
- зона неоднозначности
Реальные характеристики, как правило, не имеют идеальной формы, что необходимо учитывать при их использовании. Например, можно выбрать рабочую точку или зону на нелинейной характеристике таким образом, чтобы эта точка или зона находились в относительно линейной или линейной ее части. Выбор рабочей точки производится с учетом размеров рабочих диапазонов входного и выходного сигналов, рис. 2.17.

Рис. 2.17. Выбор рабочей точки или зоны
на нелинейной характеристике:
![]() и
и
![]() -
границы линейной части характеристики
-
границы линейной части характеристики