

Описание объекта
Турбонасос, приводимый в движение асинхронным электродвига-телем, от водозабора подает воду в накопительный резервуар. Из резервуара вода подается потребителю (расход). При снижении уровня воды до минимальной отметки насос автоматически включается и подает воду в резервуар до тех пор, пока ее уровень не достигнет максимальной отметки. При достижении максимальной отметки насос автоматически отключается (рис. 10.1).

Рис. 10.1. Схема объекта автоматизации: ВУ 1,2 -датчики уровней воды
Система регулирования должна обеспечивать выполнение следующих функций.
1. Переключение режимов работы: «автоматический» - «ручной», что необходимо для контроля функционирования насосной установки.
2. Автоматическое включение насоса в том случае, когда уровень воды опускается ниже минимального уровня, и отключение при достижении максимального уровня.
Структурная функциональная схема

Рис. 10.2. Структурная функциональная схема автоматизрфованной насосной установки
Разработка структурной алгоритмической схемы
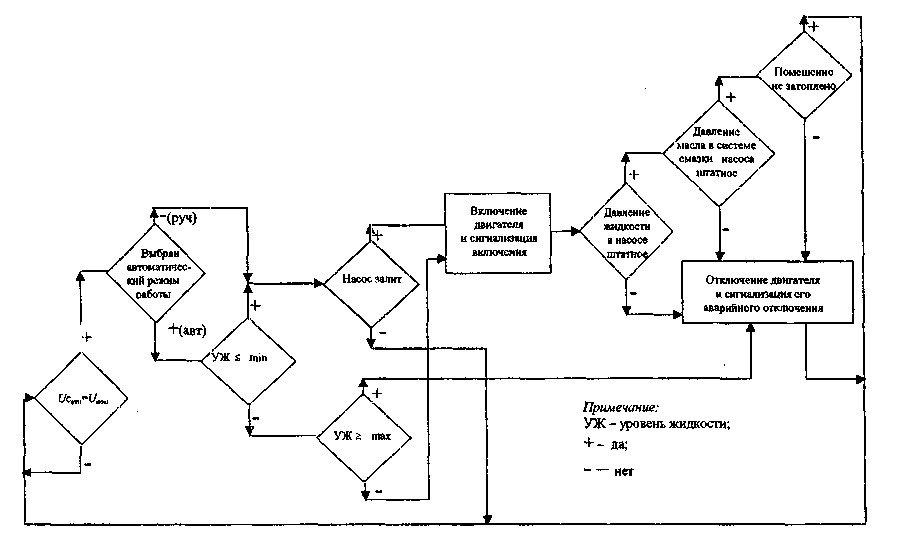
Рис. 10.3. Структурная алгоритмическая схема автоматизированной насосной установки
Разработка структурной конструкционной схемы
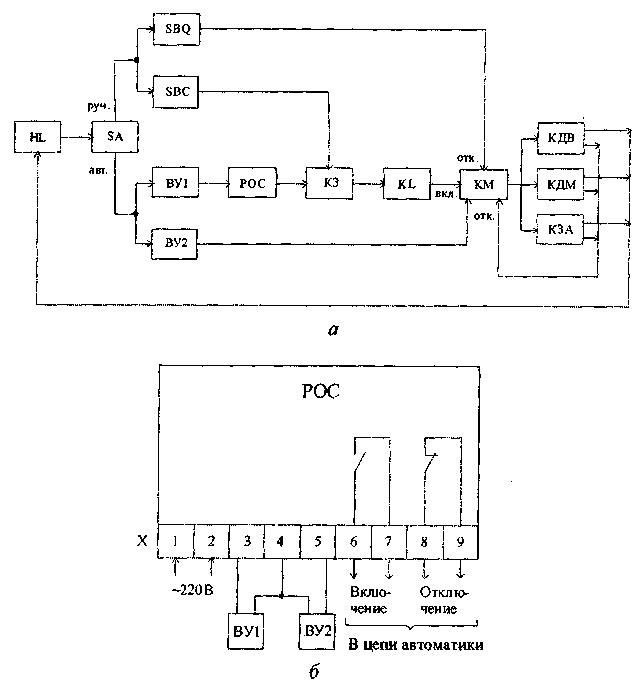
Рис. 10.4. Структурная конструкционная схема автоматизированной насосной установки (а) и схема подключения РОС (б);
HL — сигнальная лампа наличия напряжения в питающей сети; SA — переключатель режима работы (ручной – автоматический) SBQ, SSC- кнопки «Стоп» и «Пуск»; ВУ1, ВУ2 - датчики уровня воды, соответствующие минимальному и максимальному уровням; РОС - реле определения состояния; АГ, - реле заливки; KL - промежуточное реле; КМ - магаитный пускатель; КДВ - реле давления воды в коллекторе насоса; КДМ -реле давления масла в системе смазки насоса; КЗА - реле затопления помещения насосной станции, аварийное; возможный вариант условного графического изображения РОС на схеме: X - блок зажимов (клеммник) для подключения РОС к внешним электрическим цепям
3. Выдача команды на включение двигателя, если коллектор центробежного насоса предварительно залит водой. В противном случае после включения насос не сможет создать всасывающий момент и начать нормальную работу.
4. Отключение двигателя привода насоса через некоторое время после его включения, если давление воды в коллекторе или давление масла в системе смазки за это время не достигают нормальных (штатных) значений.
5. Сигнализация наличия напряжения со стороны питающей сети.
6. Сигнализация включения двигателя привода насоса.
7. Автоматическое отключение двигателя привода насоса при зато-плении помещения насосной станции.
8. Сигнализация аварийного отключения насоса, связанного с зато-плением помещения насосной станции или неисправностями насоса, с помощью красной сигнальной лампы «Аварийное отключение».
Кроме перечисленных, в состав функций, возлагаемых на конструируемое устройство автоматики, могут быть включены и другие функции по усмотрению студента.
РОС обеспечивает устойчивую (без частых включений и отключений) работу насосной установки. При работе насоса поверхность жидкости в резервуаре нестабильна. Это проявляется в виде колебаний поверхности, появлении брызг, выделении воздуха из перекачиваемой жидкости («кипение»). Такое состояние поверхности жидкости не позволяет датчикам уровня устойчиво его зафиксировать. РОС, получая информацию от датчиков, накапливает ее в течение некоторого времени. Это время зависит от скорости изменения уровня жидкости. После достижения уровнем устойчивого состояния по отношению к датчику РОС выдает информацию об этом в виде сигнала. Сигнал формируется замыканием контакта промежуточным реле в выходном блоке РОС.