

9.1.Структурные схемы с разомкнутой цепью воздействия
Структурная схема такого вида соответствует управлению, которое предполагает отсутствие различных корректировок управляющего воздействия в процессе его формирования и реализации (рис. 9.1, 9.2).

Рис. 9.1. Структурная схема автоматического управления
с разомкнутой цепью воздействия (жесткое управление):
Х и Хуст- входной сигнал и уставка устройства управления; Изм.У -
измерительное устройство; ПП - промежуточный преобразователь;
ВП - выходной преобразователь; ИУ - исполнительное устройство;
УУ - устройство управления; ОУ - объект управления
Входной сигнал X поступает на Изм.У и сравнивается там с уставкой Хуст. В результате этого сравнения формируется первичная команда управления, которая преобразуется с помощью ПП к виду, удобному для дальнейшей обработки сигнала, и передается на ВП. ВП производит дальнейшую обработку сигнала и передает его на исполнительное устройство. ИУ окончательно формирует управляющее воздействие и передает его на объект управления.
Примерами такого вида управления являются: управление любыми объектами по времени суток без корректировок; автоматическое управление пуском и торможением электропривода без корректировок; управление электрическим освещением с помощью фотореле и т.д.

Рис. 9.2. Процесс жесткого управления:
t - время (мин); хнач - начальное значение контролируемой величины
В процессе жесткого управления под действием различных возмущений со стороны окружающей среды на объект управления могут возникать ситуации, при которых состояние объекта или величина контролируемого параметра выходят за допустимые пределы, что ухудшает качество регулирования. Исключить возможные негативные последствия такой ситуации для объекта управления позволяет экстренная корректировка заправляющего воздействия. Такой вид управления называют управлением по возмущению (рис. 9.3, 9.4).

Рис. 9.3. Структурная схема жесткого управления с
экстренной корректировкой управляющего
воздействия (управление по возмущению):
ФУВ - формирователь управляющего воздействия
(объединены блоки ВП и ИУ, см. рис. 9.1);
ОУ - объект управления;f- возмущающее воздействие

Рис. 9.4. Процесс жесткого управления с экстренной
корректировкой управляющего воздействия по возмущению:
Хmах, Xmin - максимальное и минимальное значения
контролируемой величины
Такие корректировки характерны: для управления механизмами с предельно допустимыми ограничениями по величине перемещения (конечные выключатели), скорости (реле скорости), ускорения (реле ускорения); регулирования уровня жидкости в резервуарах с ограничением верхнего предельного уровня (датчик уровня жидкости); управления давлением воздуха или газов в ресивере или магистрали (датчик давления) и т. д.
9.2. Структурш»1е схемы с замкнутой цепью воздействия
Управление с замкнутой цепью воздействия характеризуется тем, что значения требуемых показателей управляемого процесса (У) поддерживается с помощью обратной связи за счет подачи на УУ сигналов, определяемых действительным ходом процесса управления. Такие структурные схемы имеют следующие виды управления.
1. Управление по отклонению (рис. 9.5,9.6). Рис. 9.5.
Сигнал с ЭОС, характеризующий текущее состояние ОУ (У), подается на устройство управления, которое сравнивает его с параметром уставки УУ (Ууст). На основании этого сравнения вырабатывается сигнал, пропорциональный разности (У - Ууст.). Далее этот сигнал преобразуется в формирователе управляющего воздействия (ФУВ) и передается на объект уп-
равления (ОУ) через исполнительное устройство, входящее в состав ФУВ. В такой системе управления влияние возмущающих воздействий не исключается, но ослабляется. Конечной целью такого вида управления является достижение равенства У = yуст.
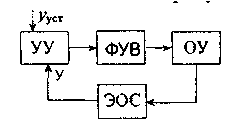
Рис.9.5.Структурная схема управления по отклонению

Рис. 9.6. Процесс управления по отклонению
2. Комбинированное управление (рис. 9.7, 9.8).
Эта система управления сочетает в себе преимущества управления по отклонению и по возмущению. Объединив функции устройства управления (УУ) и ФУВ в устройстве, которое называется «Регулятор», структурную схему комбинированного управления можно представить в виде, изображенном на рис. 9.7.
Эта система позволяет увеличить точность управления в сравнении с ранее рассмотренными системами управления.

Рис.9.7. Структурная схема комбинированного управления.
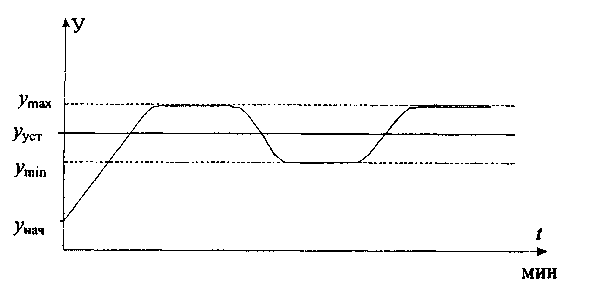
Рис. 9.8. Процесс комбинированного управления
3. Система следящего управления (следящая система) (рис. 9.9, 9.10).
Такие системы служат для «отслеживания» состояния объекта или контролируемой величины, например, механических перемещений. Целью такого управления является сведение к минимуму разности между входной и выходной величинами. Характерной особенностью таких систем является наличие исполнительных устройств непрерывного действия, что отличает этот вид управления от управления по отклонению при дискретных ИУ. Входным сигналом является разность между выходной и входной величинами. Этот сигнал называется сигналом рассогласования и формируется сумматором (рис.9.9)

Рис. 9.9. Структурная схема следящей системы:
![]() -
суммирующее устройство, УУ - устройство
управления,
-
суммирующее устройство, УУ - устройство
управления,
ФУВ - формирование управляющего воздействия,
ОУ - объект управления, Э0С1, Э0С2 - элементы обратной связи
Сигнал рассогласования (у'-у") подается на УУ, где он преобразуется, усиливается и используется для формирования управляющего воздействия.

Рис. 9.10. Процесс работы следящей системы