

1. Двухпозиционное (жесткое) регулирование
Этот вид регулирования предполагает использование двухпозици-онных исполнительных устройств. При отклонениях температуры контролируемой среды от уставки в ту или другую стороны регулятор выдает соответствующую команду исполнительному устройству «включить» или «отключить» (рис. 8.6). Исполнительное устройство включает или отключает канал подачи энергии в контролируемую среду. Под контролируемой средой понимается, например: внутренняя полость печи для термообработки материалов, любой вид помещений, где регулируется температура воздуха, температура воды в системах теплоснабжения или в системах горячего водоснабжения и т.д. После исполнения одной из этих команд в контролируемой среде начинается Т1роцесс изменения температуры (увеличение или уменьшение). Скорость изменения температуры зависит от инерционности объекта и мощности системы подачи энергии.
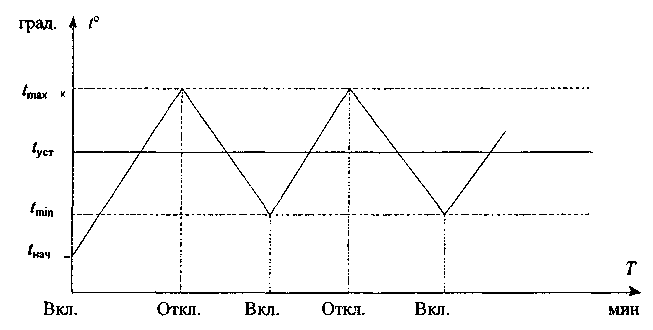
Рис. 8.6. Процесс изменения температуры в контролируемой
среде при двухпозиционном (жестком) регулировании:
t - текущее значение температуры контролируемой среды; tуст. – температура уставки регулятора; tнач. - начальное значение температуры; tmax,tmin - диапазон температуры, определяющий точность регулирования; T- время работы
Основным недостатком двухпозиционного регулирования является его малая точность.
2. Ступенчатое регулирование
Особенностью этого принципа регулирования, в сравнении с двух-позиционным, является его более высокая точность. Точность увеличивается за счет уменьшения влияния инерционности при использовании нескольких ступеней регулирования (рис. 8.7).

Рис. 8.7. Процесс изменения температуры в контролируемой
среде при двухступенчатом регулировании:
От2с, Вк2с - моменты отключения и включения второй ступени (2с).
Первая ступень работает без отключения
3. Пропорциональное (плавное) регулирование
Этот принцип позволяет получить наиболее высокую точность.
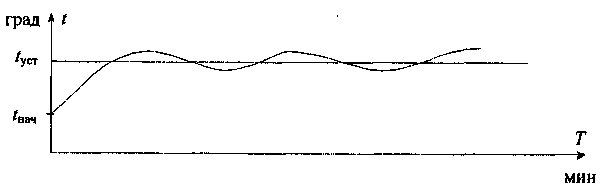
Рис. 8.8. Процесс изменения температуры
при пропорциональномрегулировании
9. Структурные схемы устройств автоматики
Любое устройство автоматики работает по замкнутым или разомкнутым цепям воздействия (контурам, или циклам управления). Цепь воздействия - это совокупность элементов устройства автоматики, в которой формируются и передаются на объект управления управляющие воздействия.
Принцип действия и состав элементов устройства автоматики удобно изображать с помощью структурных схем.
Структурная схема - схематическое изображение устройства ав-томатики, которое отражает состав, назначение элементов и взаимодействие между ними. Структурная схема служит основой для разработки принципиальных схем устройств автоматики или их отдельных элементов.
По назначению различают три вида структурных схем: функциональные, алгоритмические и конструкционные.
Функциональная структурная схема - структура устройства автоматики, каждый элемент которой предназначен для выполнения определенной функции в соответствии с назначением этого устройства.
Эти элементы показываются на схеме с учетом последовательности их выполнения и взаимной связи. Функциональная схема, как правило, является первым этапом разработки устройства автоматики.
Алгоритмическая структурная схема - структура устройства автоматики, каждый элемент которой предназначен для выполнения соответствующей части алгоритма получения, преобразования и хранения информации, формирования управляющего воздействия и передачи его на объект управления.
Этот вид структурной схемы разрабатывается на основе функциональной схемы.
Конструкционная структурная схема - структура устройства автоматики, каждый элемент которой представляет собой самостоятельное устройство (техническое средство), предназначенное для выполнения одной или нескольких функций, отраженных на функциональной схеме в соответствии с алгоритмом, представленным на алгоритмической структурной схеме.
Под самостоятельными устройствами (техническими средствами) понимаются: различные реле и регуляторы, датчики, усилители, делители напряжения, преобразователи и другие элементы. Конструкцион-
ная схема разрабатывается на основе функциональной и алгоритмической схем. Она непосредственно близка к принципиальной схеме.
Любой из видов структурных схем может иметь как разомкнутые, так и замкнутые цепи воздействия. Замкнутые цепи воздействия образуются с помощью обратных связей. Обратная связь - это связь элементов устройств автоматики, идущая от выхода к входу.
Главная обратная связь - это обратная связь, соединяющая главные выход и вход всего устройства автоматики.
Внутренняя обратная связь - это обратная связь внутри устройства автоматики. Устройство автоматики может содержать несколько внутренних обратных связей.
Ниже на примере функциональных схем рассмотрены структурные схемы для различных видов управления и регулирования.