

5. Датчики
Датчик - устройство, преобразующее контролируемую величину в выходной сигнал, удобный для дальнейшей обработки или дистанционной передачи. Преобразование контролируемой величины на входе датчика (Д) производится с помощью одного из видов преобразователей, рассмотренных выше. Дальнейшее преобразование сигнала, выполняемое для изменения физической природы сигнала или его мощности, производится с помощью специальных промежуточных преобразователей. Таким образом, в большинстве случаев датчик представляет собой сочетание нескольких элементов, начиная с первичного преобразователя. Существует большое количество различных датчиков: перемещения, усилий, давления, скорости, ускорения, температуры, расхода жидкости и газа, освещенности, уровня жидкости в резервуарах, деформации и т.д. Один и тот же параметр, например температуру, можно измерить различными видами датчиков с различными принципами их действия. Датчики неэлектрических величин принято обозначать буквой «В» с соответствующим индексом, например «Вt» - датчик температуры.
В зависимости от вида выходного сигнала различают датчики двух видов: 1) датчики непрерывного действия и 2) датчики дискретного действия. Датчики непрерывного действия построены на аналоговых элементах, а датчики дискретного действия, как правило, представляют собой импульсные устройства.
Последовательность действия элементов, входящих в состав датчика, отражается на его структурной схеме. Существует три основных вида структурных схем датчиков: с последовательным соединением элементов, компенсационная, дифференциальная. В соответствии с этим называются сами датчики: последовательный или просто датчик, компенсационный и дифференциальный.
5.1. Датчики с последовательным соединением элементов

Рис. 5.1. Структурная схема датчика с последовательным
соединением элементов:
ЧЭ - чувствительный элемент; ПП - промежуточный преобразователь; х,у- входной и выходной сигналы; ВП — выходной преобразователь
ЧЭ измеряет входную величину, ПП - преобразует измеренную входную величину к удобному виду, а ВП согласует выходной сигнал датчика с входом последующего устройства. Такую структурную схему имеет большинство датчиков, например, датчик давления Р.

Рис. 5.2. Структурная схема датчика давления:
М - мембрана; РД - червячный редуктор; ЭК - выходной электрический контакт; Р' - сигнал, соответствующий измеряемому давлению
5.2. Дифференциальные датчики
Особенностью этих датчиков является наличие двух одинаковых преобразовательных звеньев, разность выходных сигналов которых определяет выходной сигнал датчика. Разность выходных сигналов находится с помощью сумматора СМ (рис. 5.3).
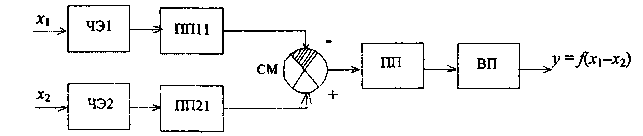
Рис. 5.3. Структурная схема дифференциального датчика: СМ - сумматор
Заштрихованный сектор СМ обозначает отрицательный знак сигнала х1.
На рис. 5.4 в качестве примера показан оптико-электронный датчик перемещений на основе фотоэлементов.

Рис. 5.4. Схема дифференциального датчика перемещений:
X - направление и величина перемещений;
ИС - источник света, формирующий концентрированный
световой поток; Ф1,Ф2 - фотоэлементы; R1,R2 - нагрузочные
резисторы с одинаковым сопротивлением; П - зеркальная
призма; У — усилитель выходного сигнала
При отсутствии перемещения х, световой поток Фс от ИС равномерно распределяется по двум граням призмы П и на Ф1 и Ф2 попадают одинаковые световые потоки. Под действием этих световых потоков и внешнего источника постоянного тока на фотоэлементах образуются равные токи. Протекая через нагрузочные резисторы R1 и R2, эти токи создают равные напряжения U1 и U2, поступающие на сумматор выходного усилителя У. Сумматор складывает эти два напряжения с разными знаками. В результате этих действий выходной сигнал датчика будет равен нулю. При наличии перемещений х на выходе у появится напряжение, величина которого будет зависеть от величины перемещения, а знак выходного напряжения укажет на направление этого перемещения.