

4.4.2. Преобразователи скорости
а) Электромеханический преобразователь скорости (рис. 4.31).
В основе принципа действия лежит взаимодействие магнитного поля вихревых токов диска 2 и магнитного поля постоянного магнита 1. Постоянный магнит жестко связан с валом бис контролируемым объектом. Диск 2 вместе с валом 3 и стрелкой индикации скорости поворачивается на угол , который зависит от частоты вращения постоянного магнита.

Рис. 4.31. Электромеханический преобразователь скорости: / - постоянный магнит; 2 - диск металлический из сплава алюминия; 3 - вал, жестко соединенный с диском и стрелкой индикатора скорости; 4 - пружина, демпфирующая колебания стрелки; - угловое перемещение стрелки; 5 - шкала индикации скорости вращения; 6-вал
б) Центробежный преобразователь (рис. 4.32).

Рис. 4.32. Центробежный преобразователь:
1 — вал, соединенный с контролируемым объектом; 2 - система рычагов и тяг; 3 - пружина, возвращающая систему рычагов в исходное положение после снижения скорости вращения вала l; 4 - грузы, увеличивающие центробежную силу F, 5 - втулка, скользящая по валу; у - перемещение втулки; со - скорость вращения вала
4.4.3. Преобразователи ускорения
В преобразователях ускорения, рис. 4.33, 4.34 используется механическая инерционность.
Статическая характеристика управления
![]() (4.20)
(4.20)
где Кп - коэффициент передачи. Величина коэффициента передачи зависит от веса деталей подвижной части преобразователя и жесткости пружины.

Рис. 4.33. Преобразователь ускорения с линейным перемещением груза:
/ - корпус, жестко связанный с контролируемым объектом; 2 - пружина; 3 - груз; 4 - поршень для демпфирования колебаний; х - перемещение корпуса преобразователя; у - перемещение груза

Рис. 4.34. Преобразователь ускорения
с угловым перемещением груза:
/ - корпус; 2 - груз; 3 - демпфирующие пружины;
y-линейное перемещение корпуса; ( -угловое
перемещение груза
Статическая характеристика управления:

4.4.4. Преобразователи температуры
Из этого вида преобразователей наиболее часто используются преобразователи на базе биметаллических пластин (рис. 4.35 и 4.36). Биметаллические пластины состоят из двух пластинок, изготовленных из материалов с разными температурными коэффициентами линейного расширения (инвар - сплав железа и никеля, молибденоникелевые или хромоникелевые стали и т.д.). Эти пластинки соединяются между собой с помощью точечной сварки или другим способом. При нагревании биметаллических пластин происходит их деформация, как результат разных линейных расширений материалов, входящих в состав биметаллической пластины.
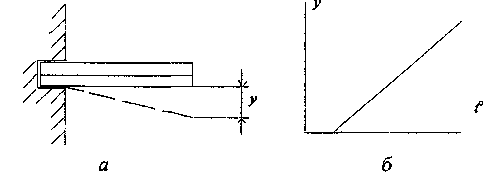
Рис. 4.35. Температурный преобразователь с прямоугольной биметаллической пластиной:
а - принцип действия; б - характеристика управления;
у - деформация пластины; f - температура окружающей
среды

Рис. 4.36. Температурный преобразователь с биметаллическим диском:
а - принцип действия; б - характеристика управления; у - деформация пластины; t - температура окружающей
среды; tср - температура срабатывания преобразователя