

4.3.3. Пьезоэлектрический преобразователь
Принцип действия основан на прямом пьезоэлектрическом эффекте -появлении электрических зарядов на гранях некоторых диэлектриков при их деформации (кварц, сегнетова соль, титанат бария и т.д.) (рис. 4.24).
Из пьезочувствительного материала обычно вырезают пластинку в форме параллелепипеда. При действии на пластинку силы F, направленной вдоль продольной оси, на гранях, перпендикулярных этой оси, возникают равные по величине, но противоположные по знаку заряды q. При изменении направления действия силы F изменяется знак заряда.

Рис. 4.24. Пьезоэлектрический преобразователь
Величина заряда, возникающего как результат пьезоэлектрического эффекта:
q=KF> (4.18)
где кп - пьезомодуль материала (пьезоэлектрический коэффициент).
Эта формула справедлива только в пределах упругой деформации материала. Снимаемый с пьезоэлемента сигнал в виде ЭДС Е,, имеет очень маленькую мощность, поэтому он должен быть усилен.
4.3.4. Вентильные фотоэлементы (фотодиоды)
В основе принципа их действия - вентильный фотоэффект. Вентильный фотоэффект - это перемещение электронов из освещенного вещества в другое вещество, отделенное от первого запирающим слоем. В этом случае, под действием светового потока Фс возникает ЭДС между полупроводником и чистым металлом, разделенными промежуточным запирающим слоем, обладающим односторонней проводимостью (4.25).

Рис. 4.25. Конструкция фотодиода:
1 - контактные электроды металлические; 2 - слой полупроводникового материала (селен, сернистый таллий, сернистое серебро и т.д.); 3 - полупрозрачный слой золота; 4 - пластина металлическая, выполненная заодно с контактным электродом
Световые характеристики и схема включения фотодиода имеют вид (рис. 4.26).

Рис. 4.26. Световые характеристики (а) и схема включения
(б) фотодиода в генераторном режиме:
/ф - фототок (А); Фс - световой поток (лм); R„ - сопротивление нагрузки
4.4. Неэлектрические преобразователи
Этот вид преобразователей позволяет преобразовать неэлектрическую входную величину в неэлектрическую выходную величину.
4.4.1. Преобразователи усилия и давления
Основой конструкции этих преобразователей являются упругие элементы выполненные из стали, различных сплавов бронзы, резины, пластиков и т.д. Наиболее часто эти элементы имеют форму стержня, балки, кольца, пружины (рис. 4.27).

Рис. 4.27. Преобразователи усилий:
а - стержень; б - балка одноконсольная;
в - балка двухконсольная; г - кольцо; д - пружина
Для приведенных выше элементов функция управления линейна в пределах упругости материала:
y=F/K, (4.19)
где К - жесткость упругого элемента (Н/мм); у - упругая деформация элемента (мм).
Для преобразования давления используются: мембраны (рис. 4.28), сильфоны (рис. 4.29) и трубчатые пружины (рис. 4.30).
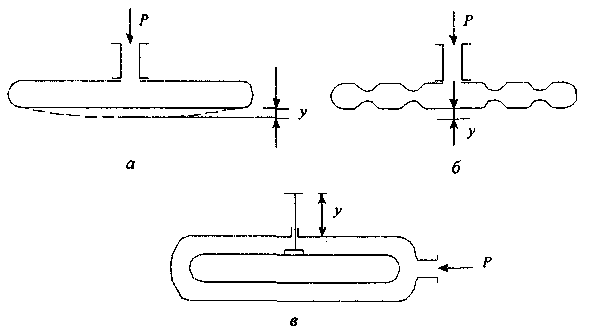
Рис. 4.28. Мембраны:
а - гладкая (негофрированная); б - гофрированная; в - гладкая
мембрана в оболочке; Р - измеряемое давление; у - величина
деформации мембраны
Сильфон представляет собой гофрированную тонкостенную трубку и обладает большей чувствительностью, чем мембрана.

Рис. 4.29. Сильфон 52

Рис. 4.30. Трубчатые пружины: а - одновитковая, б ~ многовитковая
Статическая характеристика управления имеет вид Y=f(P).