

4.2.3. Трансформаторные преобразователи
Принцип действия этих трансформаторов основан на изменении взаимной индуктивности между двумя обмотками
![]() (4.13)
(4.13)
где W1, W2 - количество витков в обмотках 1 и 2 (рис. 4.15); Zм - полное сопротивление магнитной цепи.

Рис. 4.15. Трансформаторный преобразователь:
1 - шихтованный сердечник из магнитопроводящего материала;
2 - якорь с рамочной обмоткой, содержащей W2 витков;
![]() -
угол поворота якоря; U1
- напряжение
источника;
-
угол поворота якоря; U1
- напряжение
источника;
U2 - напряжение на выходе преобразователя, снимаемое
с рамочной обмотки с помощью щеточного механизма
4.2.4. Емкостные преобразователи
Принцип действия основан на изменении емкости (рис. 4.16-4.18).
![]() (4.14)
(4.14)
где
![]() -
коэффициент диэлектрической проницаемости
среды между обкладками конденсатора;
S
- площадь
обкладок конденсатора;
-зазор между
обкладками; х
- перемещение
контролируемого объекта.
-
коэффициент диэлектрической проницаемости
среды между обкладками конденсатора;
S
- площадь
обкладок конденсатора;
-зазор между
обкладками; х
- перемещение
контролируемого объекта.
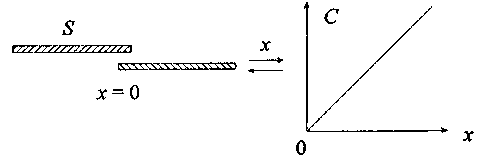
Рис. 4.16. Емкостный преобразователь с изменением площади (S) обкладок

Рис. 4.17. Емкостный преобразователь с изменением диэлектрической проницаемости среды между обкладками ( )

Рис. 4.18. Емкостный преобразователь с изменением величины
зазора между обкладками ( )
4.3. Генераторные преобразователи
Этот вид преобразователей использует энергию входного сигнала для генерации сигнала на выходе. Как правило, выходной сигнал формируется в виде ЭДС.
Виды генераторных преобразователей: 1 .Термоэлектрические (термопары). 2. Индукционные. 3. Пьезоэлектрические. 4. Вентильные фотоэлементы.
4.3.1. Термоэлектрические преобразователи (термопары)
В основе термопары - два разнородных металлических проводника, имеющие электрическую связь между собой (рис. 4.19).
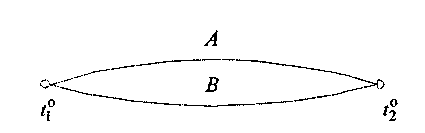
Рис. 4.19. Термопара: А, В- два проводника из разнородных металлов;
![]() -
температуры нагрева спаек по концам
проводников
-
температуры нагрева спаек по концам
проводников
При наличии разных температур на спайках между проводниками А и В возникает ЭДС
![]() (4.15)
(4.15)
Полагая,
что![]() ,
получим
,
получим
![]() .
Величина С является постоянной
величиной, зависящей от вида материалов.
С учетом этого, выражение (4.15) примет
вид
.
Величина С является постоянной
величиной, зависящей от вида материалов.
С учетом этого, выражение (4.15) примет
вид
![]() .
(4.16)
.
(4.16)
Материалы, используемые для изготовления термопар: платина, иридий, золото, родий, и их сплавы. Кроме того, могут быть использованы более дешевые материалы: сталь, медь, никель, нихром, константан, хромель, алюмель, копель и т.д.
Схема включения термопары под нагрузку и ее характеристика изображены на рис. 4.20.

Рис. 4.20. Схема включения термопары под нагрузку
и ее статическая характеристика управления
4.3.2. Индукционные преобразователи
Это устройства, состоящие из катушки с электрообмоткой и магнитной системы, которые преобразуют входной параметр (скорость угловых или линейных перемещений) в ЭДС. Принцип действия основан на том, что в катушке при изменении магнитного потока образуется ЭДС. Величина этой ЭДС равна
![]()
где W - количество витков в катушке; Ф - магнитный поток; Ч – пото-
косцепление.
Существует три вида индукционных преобразователей (ИП):
- с линейно перемещающейся катушкой (рис. 4.21).

Рис. 4.21. ИП с линейно перемещающейся катушкой
относительно постоянного магнита:
1 — цилиндрическая катушка, связанная с контролируемым объектом, с которой снимается выходной сигнал, пропорциональный скорости перемещения; 2 - постоянный магнит, имеющий форму полого цилиндра
- с вращающейся катушкой (рис. 4.22).
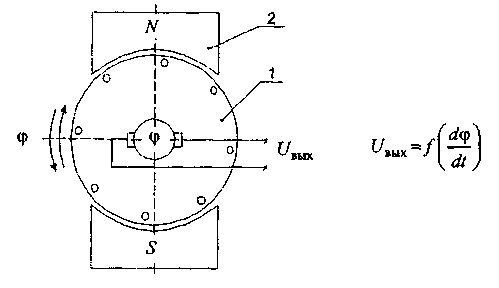
Рис. 4.22. ИП с вращающейся относительно постоянного
магнита катущкой:
1 - вращающаяся цилиндрическая катушка со щеточным
механизмом и коллектором; 2 - постоянный магнит
Выходной сигнал в виде напряжения, пропорционального скорости углового перемещения, снимается с катушки 1 с помощью щеточного
механизма и коллектора;
- с ферромагнитным якорем (рис. 4.23).

Рис. 4.23. ИП с ферромагнитным якорем:
1 -постоянный магнит; 2 - якорь (ферромагнитный материал);
3 - магнитопровод; 4 - катушка