

3.3. Процесс чистого размножения
Предположим, что в процессе Пуассона вероятность одного события за время (t, t+ h) зависит от числа событий за время (0, t ). Такой процесс можно рассматривать как пуассоновский процесс с переменной интенсивностью, характеризующейся последовательностью λ0, λ1, λ2, ……
Удобной формой описания процесса Пуассона является описание его в пространстве состояний.
Пусть на время (0, t ) произошло n событий. Будем говорить, что в этом случае система находиться в состоянии E n. Если за время h произойдет очередное событие, то система перейдет в состояние E n+1. В противном случае система останется в состоянии E n.
Определение 3.1.
Пуассоновский процесс, для которого переход из состояния E n возможен только в состоянии E n+1, называется процессом чистого размножения [ 5 ].
Если в момент t система находиться в состоянии E n (n = 0,1, 2, ….), то вероятность того, что за время (t, t+ h) осуществляется переход в E n+1, как это следует из (3.2 ), равна λ n h + 0 (h). Вероятность иных изменений имеет более высокий порядок малости, чем h.
Дифференциальные уравнения (3.4 ) и (3.5 ) имеют для процессов чистого размножения следующий вид:
Р' n (t) = – λ n Р n (t) + λ n-1Рn-1(t);
Р0 (t) = – λ 0 Р 0 (t) (n ≥ 1 ) (3.7 ) Начальным состоянием системы является E 0 , причем Р 0 (0) =1, а Р 0 (t) = e - λ 0t.
Можно, однако, в начальный момент времени рассматривать систему в любом состоянии.
Обобщим рассмотренный процесс размножения. С этой целью предположим, что в системе возможны переходы из E n но только в E n+1, но и в состояние E n-1 . Конечно, в этом случае состояние E n уже нельзя трактовать как число событий, реализованных на отрезке ( 0,t ).
Процесс такого вида впервые был изучен в биологии, где с его помощью опи-сывались процессы рождения и гибели. Поэтому иногда такие процессы называют процессами " гибели и размножения" [ 5 ].
В задачах анализа и синтеза АСУ такие процессы находят достаточно широкое применение. Поэтому рассмотрим их подробнее.
3.4. Пуассоновские процессы в системах массового обслуживания
Начнем с содержательного примера, имеющего большое значение для анализа и синтеза АСУ.
Пример 5. Рассмотрим вычислительную систему коллективного пользования, функционирующую в диалоговом режиме ( рис. 5 ).
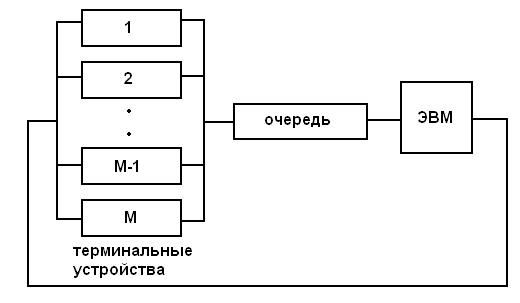
Рис.5. Вычислительная система коллективного пользования
В этой вычислительной системе каждое терминальное устройство может находиться в одном из двух режимов: " активное ожидание" и " пассивное ожидание". В режиме активного ожидания терминальное устройство ожидает разрешения на ввод очередного сообщения в ЭВМ. Если ЭВМ свободна, то она немедленно приступает этого сообщения. В противном случае сообщение помещается в очередь, где ожидает в течение некоторого времени.
Пусть любое терминальное устройство, находящееся в режиме пассивного ожидания, может быть активизировано в интервале времени (t, t+ h) с вероятностью λ h + 0 (h), причем активизация терминалов происходит независимо друг от друга. Таким образом, если терминал пассивен в момент времени t, то промежутки времени от t до его активизации имеют распределение Пуассона (3.6)
Суммарный поток событий (поток переключений ) будет являться процессом чистого размножения с интенсивностью
![]() при
0 ≤ n
≤ М, ( 3.8)
при
0 ≤ n
≤ М, ( 3.8)
при n > М.
Предположим теперь, что времена обработки представляют собой случайные числа, имеющие экспоненциальное распределение e –μ t .
Другими словами, вероятность того что время обслуживания очередного сообщения будет больше, чем t, есть e –μ t. Из выражения ( 3.6 ) видно, что e –μ t представляет собой распределение Пуассона при n = 0.
Предполагая, наконец, что интервалы времени обработки сообщений взаимно независимы, придем к математической модели, описывающей функционирование вычислительной системы коллективного пользования в диалоговом режиме.
Для рассмотренного примера удобно вновь ввести пространство состояний, считая, что система находится в состоянии E n ,, где n – общее число обслуживае-
мых и ожидающих в очереди сообщений, n = 0, 1, 2, … , М.
Ясно, что в такой системе из состояний E n+1 возможны переходы как в E n+1 так и в E n-1. В силу малости члена 0 (h ) в уравнении ( 3.2 ) переходы в системе возможны лишь в ближайшие, соседние состояния. Если в некоторый момент система находится в состоянии E n, то вероятность того, что за время (t, t + h) осуществляется переход E n → E n+1, равна λ n h + 0 (h), а вероятность перехода E n → E n-1 (при n ≥ 1 ) равна μ h + 0 (h ). Вероятность того, что за время (t, t + h) осуществляется более чем одно изменение, имеет порядок малости более высокий, чем h .
Для вывода дифференциальных уравнений, описывающих поведение такой системы, предположим, что в момент времени t вероятность пребывания системы в состоянии E n равняется P n ( t ) . Для вычисления P n ( t + h) заметим, что система может находиться в момент времени t + h в состоянии E n в следующих трех случаях :
в момент t система находится в E n и за время h не происходит никаких изменений;
в момент t система находится в E n-1 и затем переходит в E n;
в момент t система находится в E n+1, к моменту ( t + h) система переходит в состояние E n .
По предположению, вероятность двух и более переходов за время h равняется 0 (h ). Кроме того, первые три возможности – взаимно исключающие и вероятности их можно складывать. Поэтому
P n ( t + h) = P n ( t )[ 1 - λ n h - μ h ] + λ n –1 h P n-1 + μ n+1 h P n+1 + 0 (h ).
Перенося P n ( t ) влево и разделив на h , получим при h → 0
P1 n ( t ) = - (λ n + μ n ) P n ( t ) + λ n –1 P n-1 ( t ) + μ n+1 P n+1( t ). ( 3.9)
Аналогично выводятся уравнения для n = 0, и n = М:
P1 0 ( t ) = - λ 0 P 0 ( t ) + μ 1( t );
P1
M
( t ) = - μ n
P
M
( t ) + λ
P
m-1(
t ). (3.10)
Если в момент t
= 0 система находится в состоянии i,
то должны выполняться начальные условия
![]() (
0 ) = 1,
(
0 ) = 1,
![]() = 0 при n
≠ i.
= 0 при n
≠ i.
Система дифференциальных уравнений ( 3.10 ) выведена для λi, μi, произвольно зависящих от n . В большинстве случаев зависимости λ( n) и μ( n ) имеет специальный вид. В частности для примера 5
λn = (μ – n)λ , μn = μ и дифференциальные уравнения принимают вид:
P1 0 ( t ) = - мλ P 0( t ) + μ P 1 ( t );
P1 n ( t ) = -[ ( М – n )λ + μ ] Pn( t ) + … + μ P n+1 ( t ) (3.11 )
P M ( t ) = - μ P M ( t ) + λP м -1( t ).
Эта линейная система дифференциальных уравнений, которая может быть решена обычными методами. При t → ∞ и ограниченных λ, μ, м система ( 3.11 ) имеет единственное решение [ 5 ], причем пределы
Существуют не зависят от начальных условий.
Предельные вероятности P n удовлетворяют системе линейных уравнений, получаемых из ( 3.11 ), если положить в них P1 n ( t ) = 0. Для P n из ( 3.11 )
при P1 n ( t ) = 0 легко вывести рекуррентную формулу
( М – n ) λ P n = μ P n + 1 (3.12)
Полагая n = М – 1, М = -2, … , 1, 0 , получаем
![]() (3.13)
(3.13)
Неизвестную постоянную P M можно определить из условий, что сумма P
равна единице. Легко видно, что
![]() (3.14)
(3.14)
Вероятность P 0 может интерпретироваться для примера 5 как вероятность того, что ЭВМ не занята. Математическое ожидание числа сообщений, стоящих в очереди, равно
![]() (3.15)
(3.15)
Так как P ! в сумме дают единицу, получим, используя (3.14 ), что
![]() (3.16)
(3.16)
или
![]()
4. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД СЛУЧАЙНЫМИ ПРОЦЕССАМИ
С НЕПРЕРЫВНЫМ ВРЕМЕНЕМ
4.1. Свойства корреляционных функций случайных процессов
с непрерывным временем.
В этом разделе мы подробно изучим
введенную в п.п. 1.1 корреляционную функцию
случайных процессов
![]() .
Напомним, что корреляционная функция
случайного процесса – это функция двух
аргументов :
.
Напомним, что корреляционная функция
случайного процесса – это функция двух
аргументов :
![]() (4.1)
(4.1)
На практике часто используют нормированную корреляционную функцию
![]() (4.2)
(4.2)
Последняя
функция удобна тем, что ее значения
находятся в пределах ± 1 и, следовательно,
по абсолютной величине
![]() можно судить о степени связности
(зависимости) двух ординат случайного
процесса.
можно судить о степени связности
(зависимости) двух ординат случайного
процесса.
Непосредственно из определения корреляционной функции (4.1) следует, что корреляционная функция симметрична
![]() (4.3)
(4.3)
Это обстоятельство позволяет ограничиться областью аргументов t≥ s или s ≥ t. Корреляционная функция случайного процесса удовлетворяет неравенству
![]() (4.4)
(4.4)
Корреляционная функция обладает очень важным свойством, позволяющим существенно облегчить анализ случайных процессов, свойством положительной определенности [6 ]. Смысл этого свойства в следующем. Рассмотрим интеграл
![]() (4.5)
(4.5)
где
![]() -
некоторые произвольные функции.
-
некоторые произвольные функции.
Подставив в (4.5) выражение корреляционной функции (4.1), меняя местами операции интегрирования и математического ожидания, получим
 где
где
![]()
Последнее выражение можно записать теперь в виде:
![]()
Но
математическое ожидание неотрицательной
величины не может быть отрицательным
и, следовательно, при любой области
интегрирования Т и при любой функции
интеграл (4.5) не меньше нуля. Функция
![]() ,
обладающие таким свойством, называются
положительно определенными функциями.
,
обладающие таким свойством, называются
положительно определенными функциями.