

8. Асинхронные машины (переменного тока)
Асинхронные машины обладают свойством обратимости. Используются в основном в качестве двигателя, в генераторном режиме применяются редко так как не являются источником реактивной мощности. Широкое применение имеют трехфазные асинхронные двигатели.
Асинхронный двигатель состоит из неподвижного статора и вращающегося ротора, разделенных между собой воздушным зазором. Статор состоит из цилиндрического литого корпуса, сердечника и трехфазной обмотки. Сердечник собирается из тонких листов электротехнической стали, изолированных друг от друга, и запрессовывается в корпусе статора. На внутренней поверхности сердечника вырублены пазы, в которые укладывается трехфазная обмотка статора. Обмотка подключена к трехфазной сети и представляет собой систему проводников, сдвинутых относительно друг друга в пространстве вдоль окружности статора на 120о. Обмотки статора могут соединяться звездой или треугольником. Схема соединения обмоток статора зависит от расчетного напряжения двигателей.
Ротор состоит из стального вала, на который напрессован сердечник, выполненный из отдельных листов электротехнической стали с пазами. Обмотка ротора бывает двух типов – короткозамкнутая и фазная. Наибольшее распространение имеют двигатели с короткозамкнутым ротором (ротор с беличьей клеткой). Токопроводящая часть такого ротора состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов (рис. 8.1а). Обычно беличья клетка формируется путем заливки пазов ротора расплавленным алюминием.
Ф

Фазный ротор 1
- обмотка 2
- контактное кольцо 3
- вал ротора 4-
щетка 5
- реостат
Рис. 8.1
Короткозамкнутый
ротор с
обмоткой в виде беличьей клетки
Для осуществления электрического контакта с обмоткой вращающегося фазного ротора на каждое контактное кольцо накладывают подпружиненные щетки, расположенные в щеткодержателях. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию и менее надежны, но они обладают лучшими регулировочными и пусковыми свойствами.
Принцип действия асинхронного двигателя
Принцип действия асинхронного механизма впервые нашел воплощение в опыте французского ученого Д.Ф. Араго в 1824 г. при создании высокочувствительного компаса. По замыслу Араго большая магнитная стрелка должна была размещаться на оси, укрепленной в дне массивной медной коробки с крышкой. При первом же испытании массивного компаса Араго заметил, что при повороте крышки магнитная стрелка увлекается вслед за ней, но при остановке крышки стрелка после несколько колебаний останавливается.
Араго предположил, что если магнитная стрелка увлекается медной крышкой оправы, то при вращении магнита он должен увлекать за собой легкий медный диск, что и подтвердилось в результате опыта. Учитывая, что в покое взаимодействие не наблюдалось, Араго пришел к выводу, что при вращении магнитной стрелки в медном диске возникают какие-то магнитные силы неясной природы.
На основе явления электромагнитной индукции Фарадей сумел объяснить загадочное вращение, наблюдавшееся Араго: медный диск увлекается магнитной стрелкой потому, что вращающееся магнитное поле вызывает в толще диска индуцированные токи, взаимодействующие с магнитом.
При вращении подковообразного постоянного магнита в медном диске возникают электрические токи, взаимодействующие с магнитом, и медный диск начинает вращаться вслед за магнитом с несколько меньшей скоростью.
В основе работы асинхронного двигателя лежит вращающееся магнитное поле, создаваемое трехфазными токами в обмотке статора, и воздействие этого поля на токи, протекающие в обмотке ротора.
При протекании трехфазного тока по трехфазной обмотке статора возникает вращающееся магнитное поле (частота вращения n1), которое пересекает проводники обмотки ротора и наводит в них ЭДС в соответствии с законом электромагнитной индукции. В замкнутой обмотке ротора возникают токи. В результате взаимодействия этих токов с вращающимся полем на роторе возникают электромагнитные силы, направление которых определяется правилом левой руки. Совокупность этих сил создает электромагнитный вращающийся момент, приводящий ротор во вращение с частотой n2 < n1 в сторону вращения поля статора.
У асинхронного двигателя ротор вращается с несколько меньшей скоростью, чем поле статора, так как только при этом условии в проводниках ротора будет наводиться ЭДС, потечет ток и возникнет вращающий момент.
Двигатель называется асинхронным потому, что частота вращения ротора n2 не равна частоте вращения поля n1 статора, то есть n2 ≠ n1 .
Вращающееся поле переменного тока трехфазной цепи
Получение
вращающегося тока рассмотрим на примере
трехфазного асинхронного двигателя с
тремя обмотками, сдвинутыми по окружности
на
![]() (рис. 7.6, а) и соединенными звездой. Пусть
обмотки статора питаются симметричным
трехфазным напряжением со сдвигом фаз
напряжений и токов
и по обмоткам статора протекают токи
(рис. 7.6, а) и соединенными звездой. Пусть
обмотки статора питаются симметричным
трехфазным напряжением со сдвигом фаз
напряжений и токов
и по обмоткам статора протекают токи
![]() (рис. 7.6, б).
(рис. 7.6, б).
а)
б)
В
момент времени
![]() ток в фазе A
положительный (см. синусоиды токов), а
в фазах B
и С – отрицательный. Если ток положительный,
то направление тока примем от начала
к концу обмотки (обозначение знаком
ток в фазе A
положительный (см. синусоиды токов), а
в фазах B
и С – отрицательный. Если ток положительный,
то направление тока примем от начала
к концу обмотки (обозначение знаком
![]() в начале обмотки и знаком
в начале обмотки и знаком
![]() в конце обмотки). Пользуясь правилом
правоходового винта, легко найти картину
распределения магнитного поля обмотки
статора для момента времени
.
Ось результирующего магнитного поля с
индукцией Bmрез
расположена горизонтально (а).
в конце обмотки). Пользуясь правилом
правоходового винта, легко найти картину
распределения магнитного поля обмотки
статора для момента времени
.
Ось результирующего магнитного поля с
индукцией Bmрез
расположена горизонтально (а).

Рис. 7.7
На
рис. 7.7, б
показана картина магнитного поля в
момент времени
![]() ,
соответствующий изменению фазы тока
на угол
,
соответствующий изменению фазы тока
на угол
![]() .
В этот момент времени токи в фазах A
и B положительные, т.е. ток идет в них от
начала к концу, а ток в фазе C
– отрицательный, так как идет от конца
к началу. Магнитное поле оказывается
повернутым по часовой стрелке на угол
.
В моменты времени
.
В этот момент времени токи в фазах A
и B положительные, т.е. ток идет в них от
начала к концу, а ток в фазе C
– отрицательный, так как идет от конца
к началу. Магнитное поле оказывается
повернутым по часовой стрелке на угол
.
В моменты времени
![]() и
и
![]() ось магнитного поля соответственно
повернется на углы
ось магнитного поля соответственно
повернется на углы
![]() и
и
![]() (рис. 7.7, в,
г).
Через время, равное периоду T,
ось поля займет первоначальное положение
и поле сделает один оборот (рис. 7.7, д).
(рис. 7.7, в,
г).
Через время, равное периоду T,
ось поля займет первоначальное положение
и поле сделает один оборот (рис. 7.7, д).
Вращающий
момент М асинхронного двигателя прямо
пропорционален квадрату напряжения
сети.
![]() .
.
Различие частоты вращения магнитного поля статора n1 и частоты вращения ротора n2 определяется величиной, называемой скольжением S, которую выражают в долях единицы либо в процентах:
![]()
У асинхронных двигателей скольжение изменяется в пределах от 0 (при идеальном холостом ходе) до 1 (при пуске). Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжением Sном. Для асинхронных двигателей общего назначения Sном.=2÷8%.
Большее значение скольжения соответствует двигателям большей мощности.
Частота вращения ротора n2 при известном скольжении определяется по формуле
![]() об/мин.
об/мин.
Частота
вращения поля
![]() ,
создаваемого трехфазной обмоткой
статора:
,
создаваемого трехфазной обмоткой
статора:
![]() ,
,
где f – частота тока в сети;
р – число пар полюсов обмотки статора.
![]() .
.
Как следует из принципа действия асинхронного двигателя, обмотка ротора не имеет электрической связи с обмоткой статора. Энергия из обмотки статора передается в обмотку ротора магнитным путем.
Механическая характеристика асинхронного двигателя – это зависимость частоты вращения ротора n2 от момента М, развиваемого двигателем в установившемся режиме работы:
![]() .
.
Разновидностью механической характеристики является зависимость момента на валу двигателя от скольжения:
![]() .
.
n2
Рис. 8.2. Механическая характеристика асинхронного двигателя
В зоне от М = 0 до М≈0,9 Мmax. зависимость n2=f(М) близка к прямой линии. Участок ОН – рабочий участок. Участок НК соответствует механической перегрузке двигателя. Работа с моментом М > Мном. возможна лишь кратковременно из-за перегрева машины. Участок ОК соответствует статически устойчивой работе двигателя. На этом участке обеспечивается саморегулирование. Саморегулирование - это свойство автоматического установления равновесия между моментом сопротивления, создаваемым рабочим механизмом и моментом двигателя. Участок КП соответствует неустойчивой работе.
Механическая характеристика асинхронного двигателя является жесткой, так как в пределах от идеального холостого хода до номинальной нагрузки (nном. ,Мном.) частота вращения падает не более чем на 10 %.
Механическая характеристика может быть построена по паспортным данным электродвигателя с использованием формулы Клосса:

где![]() (критическое скольжение);
(критическое скольжение);
S – скольжение, изменяющееся (1– при пуске , 0 – при идеальном холостом ходе);
![]() (коэффициент
перегрузочной способности электродвигателя).
(коэффициент
перегрузочной способности электродвигателя).
Особенности пуска в ход асинхронных двигателей
В первый момент пуска частота вращения ротора n2 равна нулю и скольжение
![]() .
.
При пуске двигателя должны выполняться условия:
- вращающий момент должен быть больше момента сопротивления, создаваемого рабочим механизмом;
- пусковой ток Iпуск. не должен иметь большого значения (должно выполняться условие Iпуск ≤(5÷7) Iном.).
В зависимости от конструкции ротора, мощности двигателя и характера нагрузки применяются различные способы пуска:
- прямой пуск;
- пуск с использованием пусковых реостатов, включаемых в цепь обмотки фазного ротора;
- пуск при пониженном напряжении.
При прямом пуске обмотка статора двигателя сразу включается на полное напряжение сети. При этом пусковые токи в статоре и роторе имеют максимальные значения. По мере разгона ротора скольжение уменьшается и токи уменьшаются.
Бросок тока при пуске может вызвать значительное падение напряжения в сети, что может привести к остановке рядом работающих двигателей, так как момент, развиваемый ими, прямо пропорционален квадрату напряжения сети. Данный способ пуска получил наибольшее применение для двигателей мощностью до 50 кВт.
Пуск с включением пускового реостата в цепь фазного ротора обеспечивает наиболее благоприятное соотношение между пусковым моментом и пусковым током. Однако этот способ пуска связан со значительными потерями мощности в пусковом реостате.
При пуске двигателя при пониженном напряжении существуют следующие способы понижения напряжения:
переключением обмотки статора с треугольника на звезду (фазное напряжение на статоре понижается в
 раз);
раз);включением в цепь обмотки статора реактивных катушек (дросселей);
подключением двигателя к сети через понижающий автотрансформатор.
Пуск двигателя при пониженном напряжении связан с понижением пускового момента ( ), что является существенным недостатком данного способа пуска.
Регулирование частоты вращения асинхронных двигателей
Из
выражения, по которому можно рассчитать
частоту вращения ротора
![]() ,
следует, что n2
можно регулировать изменением какой-либо
из трех величин: скольжения (S),
частоты тока f
в обмотке статора или числа пар полюсов
(р) в обмотке статора (ступенчатое
регулирование). В промышленности широко
применяются частотно-регулируемые
асинхронные двигатели.
,
следует, что n2
можно регулировать изменением какой-либо
из трех величин: скольжения (S),
частоты тока f
в обмотке статора или числа пар полюсов
(р) в обмотке статора (ступенчатое
регулирование). В промышленности широко
применяются частотно-регулируемые
асинхронные двигатели.
Потери и КПД асинхронного двигателя
Преобразование
электрической энергии в механическую
в асинхронном двигателе связано с
потерями энергии, поэтому полезная
мощность на выходе двигателя
![]() всегда меньше мощности на входе
всегда меньше мощности на входе
![]() на величину потерь
на величину потерь
![]() :
:
![]() .
.
Потери преобразуются в теплоту, что ведет к нагреву машины. Они разделяются на основные и добавочные. Основные потери включают в себя магнитные, электрические и механические.
Магнитные
потери
![]() в асинхронном двигателе вызваны потерями
на гистерезис и потерями на вихревые
токи, происходящими в сердечнике при
его перемагничивании. Величина магнитных
потерь пропорциональна частоте
перемагничивания. Магнитные потери в
сердечнике ротора малы (f2=2
- 4 Гц) и их в практических расчетах не
учитывают.
в асинхронном двигателе вызваны потерями
на гистерезис и потерями на вихревые
токи, происходящими в сердечнике при
его перемагничивании. Величина магнитных
потерь пропорциональна частоте
перемагничивания. Магнитные потери в
сердечнике ротора малы (f2=2
- 4 Гц) и их в практических расчетах не
учитывают.
Э лектрические
потери в
асинхронном двигателе вызваны нагревом
обмоток статора и ротора проходящими
по ним токами. Величина этих потерь
пропорциональна квадрату тока в обмотке.
лектрические
потери в
асинхронном двигателе вызваны нагревом
обмоток статора и ротора проходящими
по ним токами. Величина этих потерь
пропорциональна квадрату тока в обмотке.
Работа асинхронного двигателя экономичнее при малых скольжениях, так как с ростом скольжения растут электрические потери в роторе.
Механические
потери
![]() – это потери на трение в подшипниках и
на вентиляцию. Величина этих потерь
пропорциональна квадрату частоты
вращения ротора (
– это потери на трение в подшипниках и
на вентиляцию. Величина этих потерь
пропорциональна квадрату частоты
вращения ротора (![]() ).
).
Величина добавочных потерь мала и её принимают равной 0,5% от подводимой к двигателю мощности.
И
Кривая
зависимости КПД от коэффициента
загрузки β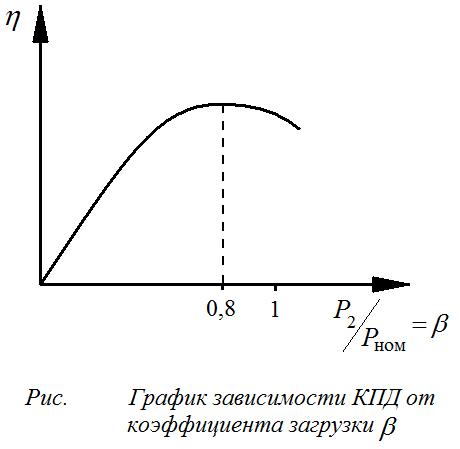
![]() (
(![]() – число фаз) затрачивается в статоре
на магнитные
– число фаз) затрачивается в статоре
на магнитные
![]() и электрические
и электрические
![]() потери. Оставшаяся после этого
электромагнитная мощность
потери. Оставшаяся после этого
электромагнитная мощность
![]() передается через воздушный зазор
передается через воздушный зазор
![]() на ротор, где частично расходуется на
электрические потери
на ротор, где частично расходуется на
электрические потери
![]() и преобразуется в полную механическую
мощность. Часть этой мощности идет на
покрытие механических
и преобразуется в полную механическую
мощность. Часть этой мощности идет на
покрытие механических
![]() и добавочных потерь
и добавочных потерь
![]() ,
а оставшаяся часть этой мощности
- это полезная мощность двигателя.
,
а оставшаяся часть этой мощности
- это полезная мощность двигателя.
КПД
асинхронного двигателя определяется
по формуле
![]() .
.
Электрические потери в обмотках и являются переменными потерями, так как их величина зависит от нагрузки двигателя. Переменными являются также и добавочные потери.
Магнитные
![]() и механические
потери практически не зависят от
нагрузки.
и механические
потери практически не зависят от
нагрузки.
КПД
асинхронного двигателя с изменениями
нагрузки также меняет свою величину: в
режиме холостого хода КПД равен нулю,
а затем с ростом нагрузки он увеличивается,
достигая максимума при нагрузке
![]() .
При дальнейшем увеличении нагрузки КПД
незначительно снижается, а при перегрузке
(
.
При дальнейшем увеличении нагрузки КПД
незначительно снижается, а при перегрузке
(![]() )
он резко убывает, что объясняется
значительным ростом переменных потерь.
)
он резко убывает, что объясняется
значительным ростом переменных потерь.
КПД
трехфазных асинхронных двигателей
общего назначения тем выше, чем больше
мощность двигателя. Например, для
двигателей мощностью более 10 кВт
![]() .
КПД является одним из основных параметров
асинхронного двигателя, определяющим
его экономичность в процессе эксплуатации.
Двигатели с низким КПД работают при
более высокой температуре нагрева
обмотки статора, что ведет к снижению
их надежности и долговечности.
.
КПД является одним из основных параметров
асинхронного двигателя, определяющим
его экономичность в процессе эксплуатации.
Двигатели с низким КПД работают при
более высокой температуре нагрева
обмотки статора, что ведет к снижению
их надежности и долговечности.
Коэффициент мощности асинхронных двигателей
Кроме активной мощности Р1 двигатель потребляет реактивную мощность Q1, в основном необходимую для образования вращающегося магнитного поля. Коэффициент мощности определяется по формуле
![]() .
.

Кривая зависимости коэффициента мощности от коэффициента загрузки двигателя
При
холостом ходе
![]() имеет малое значение (не превышает 0,2),
так как активная мощность расходуется
только на относительно небольшие потери
в статоре и небольшие механические
потери, а реактивная мощность имеет
практически постоянное значение.
Наибольшие значения
(0,8-0,9) получаются в области нагрузок
близких к номинальной.
имеет малое значение (не превышает 0,2),
так как активная мощность расходуется
только на относительно небольшие потери
в статоре и небольшие механические
потери, а реактивная мощность имеет
практически постоянное значение.
Наибольшие значения
(0,8-0,9) получаются в области нагрузок
близких к номинальной.