

7.6. Уравнение электрического состояния и векторная диаграмма синхронного двигателя.
При составлении уравнения электрического состояния цепи якоря синхронного двигателя необходимо учесть напряжение на зажимах фазы статора U, ЭДС фазы статора, возбуждаемую потоком Фо, падение напряжения в активном и индуктивном сопротивлении обмотки статора Ir и Ixc, причем, величина Ixc включает в себя ЭДС от потока рассеяния и потока якоря Ů=Ė0+İ(r+jxc).
Величина Ir очень мала по сравнению с другими, входящими в это уравнение, если ею пренебречь, получим Ů=Ė0+İjxc.
xc− синхронное сопротивление машины. Этому уравнению соответствует упрощенная схема замещения. Направление тока и ЭДС характеризуют двигатель как приемник энергии. Построение векторной диаграммы начнем с вектора напряжения Ů, направив его по вертикальной оси. Под углом φ (причем φ>0) к вектору напряжения отложим вектор тока İ. Магнитный поток якоря совпадает по фазе с током İ . Вектор İjxcопережает ток на 90°. Опускаем перпендикуляр из конца вектора напряжения Ů на линию вектора İ, откладываем на нем вектор. Вектор ЭДС Ео строим, используя равенство Ů=Ė0+İjxc
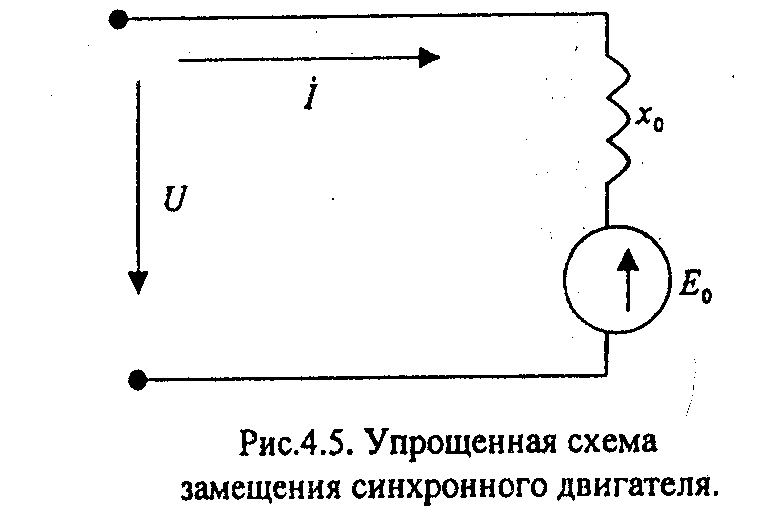
Рис. 7.5
Учитывая, что постоянный по величине вращающийся магнитный поток можно заменить пульсирующим потоком, изменяющийся во времени по синусоидальному закону, их можно изобразить на векторной диаграмме.
Согласно закону электромагнитной индукции, поток опережает наведенную им ЭДС на угол 90°, и пропорционален ей по величине. На основании этого строим Ф0 и Фя. Результирующий магнитный поток определим из равенства Ф = Фя-Ф0.
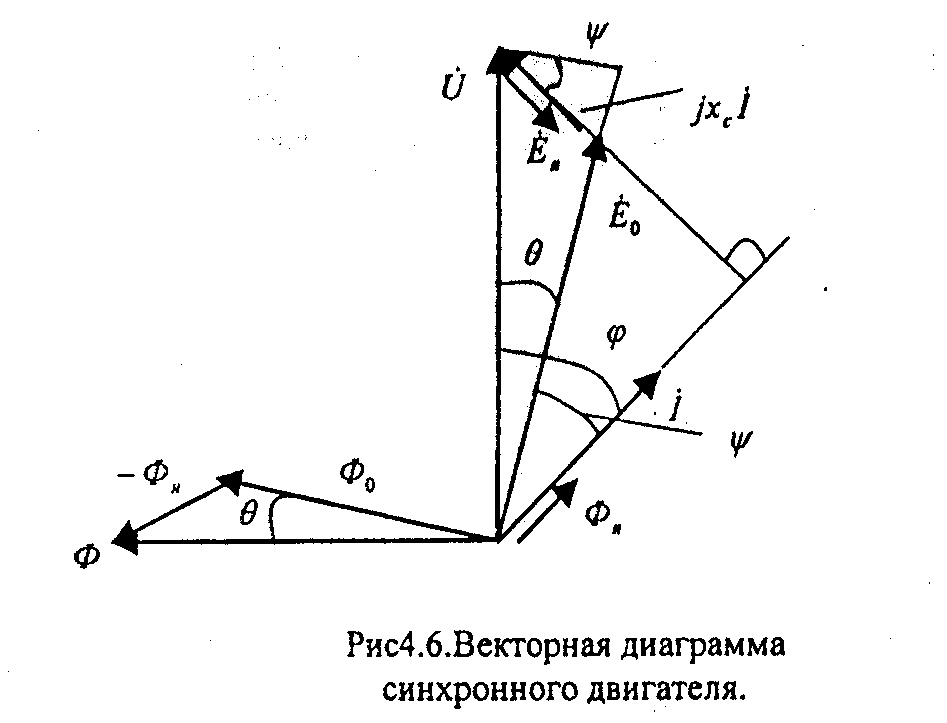
Рис. 7.6
7.7. Угловая и механическая характеристика синхронного двигателя.
Электромагнитный момент ротора
![]()
Так как К.П.Д. синхронных двигателей очень высок можно считать Р2=P1, тогда
![]()
Опустим
перпендикуляр из вершины вектора U
на вектор Ео,
тогда![]() (из
маленького треугольника), получим
(из
маленького треугольника), получим
![]() .
При постоянных Е0,U,ɷ,xc
момент зависит от угла между Е0иU,
называемым углом рассогласования и
характеризующим смещение результирующего
поля синхронного двигателя относительно
оси полюсов ротора в сторону вращения.
Зависимость М=ƒ(Ɵ)называется
угловой характеристикой асинхронного
двигателя. Участок 0<Ɵ<π/2
соответствует устойчивой работе
двигателя, так как при изменении момента
сопротивления на этом участке вращающий
момент изменяется таким образом, что
равновесие момента восстановится.
.
При постоянных Е0,U,ɷ,xc
момент зависит от угла между Е0иU,
называемым углом рассогласования и
характеризующим смещение результирующего
поля синхронного двигателя относительно
оси полюсов ротора в сторону вращения.
Зависимость М=ƒ(Ɵ)называется
угловой характеристикой асинхронного
двигателя. Участок 0<Ɵ<π/2
соответствует устойчивой работе
двигателя, так как при изменении момента
сопротивления на этом участке вращающий
момент изменяется таким образом, что
равновесие момента восстановится.
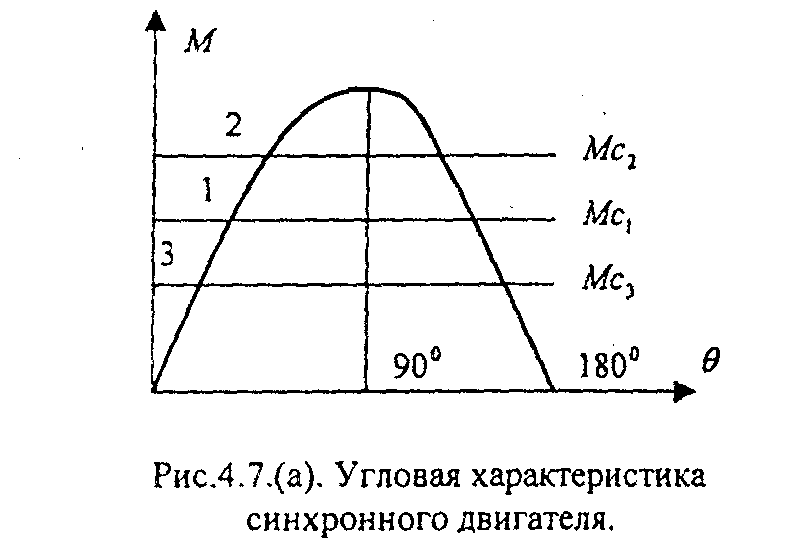
Рис. 7.7 (а)
Механическая характеристика представлена на рис.7.7.(б). При изменении нагрузки двигателя происходит лишь относительно небольшое смещение ротора относительно вращающегося поля статора, скорость ротора остается неизменной.
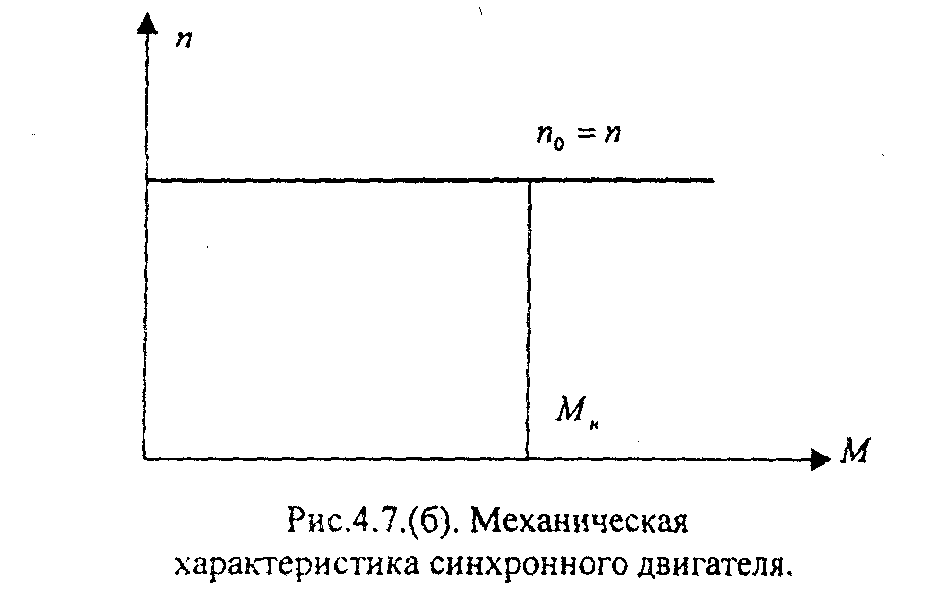
Рис. 7.7 (б)
7.8. Влияние величины тока возбуждения на коэффициент мощности.
При увеличении тормозного момента увеличивается мощность синхронного двигателя P2=Mcɷ и угол рассогласования Ɵ, что понижает запас устойчивости двигателя (π/2=Ɵ). Чтобы исключить понижение запаса устойчивости при увеличении мощности следует увеличить ток возбуждения. Это производится с помощью регулирующей аппаратуры. Реактивная мощность двигателя Q=3UIsinφ при постоянной активной мощности, регулируется изменением тока возбуждения и может иметь как индуктивный, так и ёмкостной характер.
Режим возбуждения, как правило, соответствует ёмкостной реактивной мощности, что позволяет компенсировать индуктивную реактивную мощность асинхронных двигателей и таким образом освободит электрическую сеть от реактивной составляющей тока.
Синхронный двигатель может быть использован в режиме регулируемого емкостного элемента - синхронного компенсатора для улучшения коэффициента мощности цепи.