

6.10. Коэффициент мощности и рабочие характеристики асинхронного двигателя.
Ранее говорилось о большом народнохозяйственном значении коэффициента мощности энергоустановок, повышение которого необходимо для лучшего использования энергетического оборудования генераторов, трансформаторных подстанций, линий электропередачи и распределительных сетей. Асинхронные двигатели очень широко используется, в промышленности и являются, поэтому, одним из основных потребителей электроэнергии. Они могут значительно снизить cos φ энергетических систем.
Как
известно
![]() .
.
Так как рабочий магнитный поток при постоянстве входного напряжения U1 остается неизменным, энергия магнитного поля и реактивная мощность так же остаются неизменной, и не зависит от нагрузки. Активная же мощность и, значит, cosφ зависит от нагрузки на валу двигателя.
При холостом ходе активная мощность стремится к нулю, угол сдвига фаз φ→90°. Почти весь ток, потребляемый двигателем, является реактивным и идет на создание магнитного поля. При увеличении нагрузки до номинальной, растет активная составляющая тока, угол φ уменьшается. При увеличении нагрузки выше номинальной значительно увеличиваются магнитные потоки рассеяния, реактивная составляющая тока и реактивная мощность, угол φ увеличивается, cosφ - уменьшается. Таким образом, cosφ максимален при номинальной нагрузке и уменьшается при недогрузке и перегрузке.
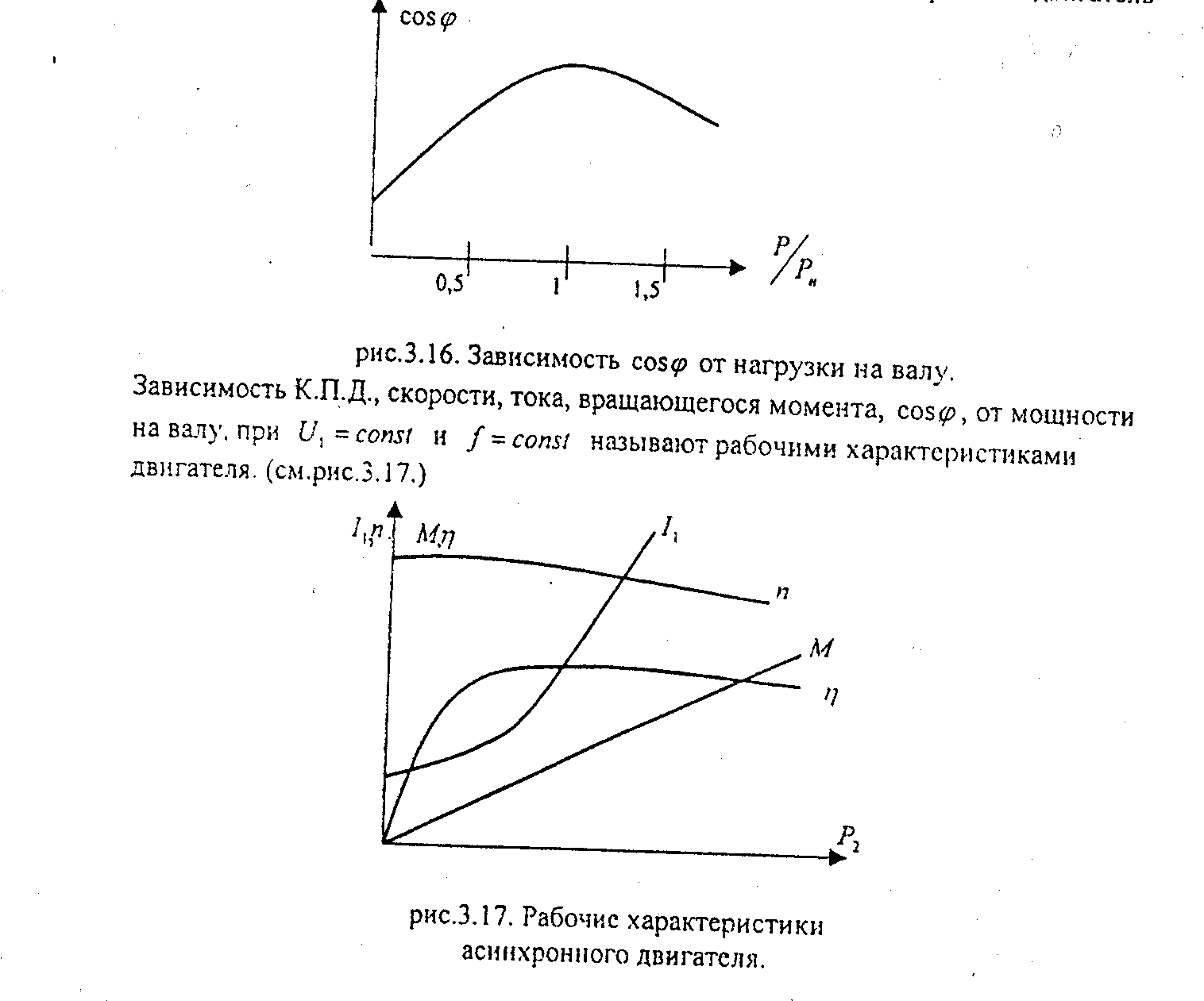
Рис. 6.16
Рис. 6.17
6.11. Электромагнитный момент.
Механическая мощность на валу связана с вращающим электромагнитным моментом соотношением.
![]() -
угловая скорость ротора. Электромагнитная
мощность Рэм
связана
с моментом соотношений
-
угловая скорость ротора. Электромагнитная
мощность Рэм
связана
с моментом соотношений
![]()
ɷ0 - угловая скорость магнитного поля
![]()
Связь между ɷ1и ɷ2 определяется скольжением s.
![]()
или ɷ2=ɷ0(1-s)
![]() ,где
р
число пар полюсов (см.рис.6.2.)
,где
р
число пар полюсов (см.рис.6.2.)
6.12. Зависимость электромагнитного момента от скольжения и напряжения сети. Механическая характеристика.
Для устойчивой работы двигателя необходимо, чтобы автоматически устанавливалось равновесие вращающего и тормозного момента на валу. С увеличением нагрузки на валу двигателя соответственно должен увеличиваться и вращающий момент. Это увеличение происходит так: при увеличении нагрузки на валу тормозной момент оказывается больше вращающего, уменьшается частота вращения ротора n, а скольжение увеличивается.
Увеличение
скольжения ведет к увеличению вращающего
момента, и наступает равновесие моментов
при увеличении скольжения. Зависимость
момента от скольжения довольна сложна.
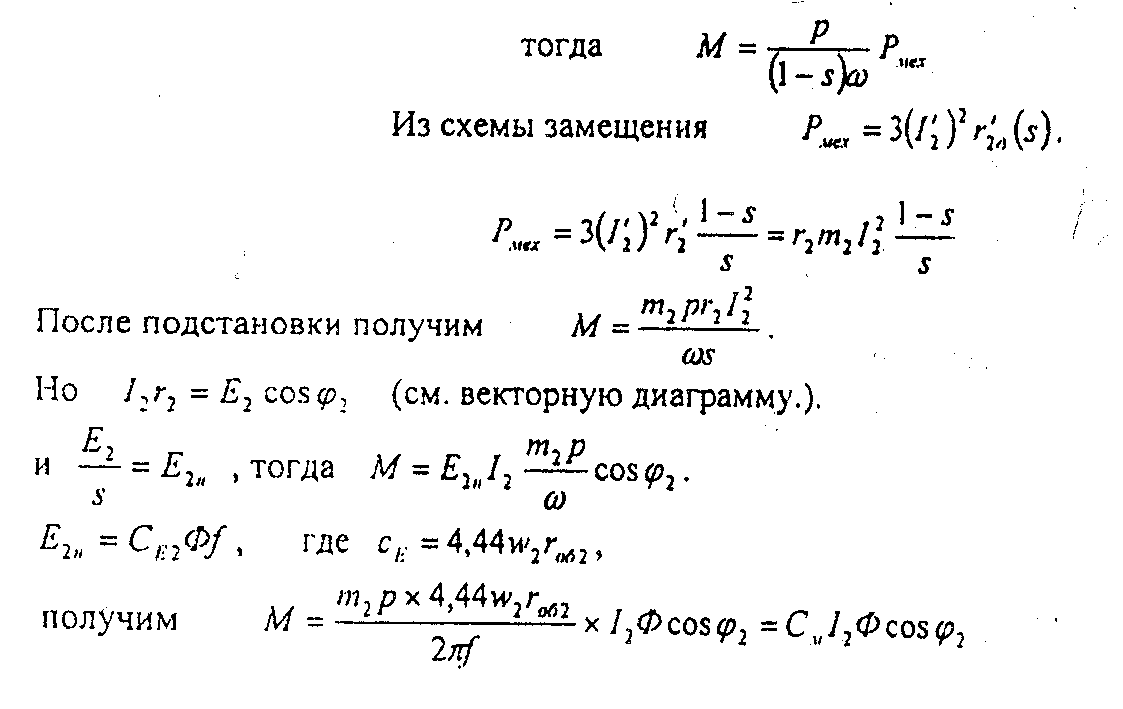
В выражении M=CMI2Φcosφ2все
величины (I2;Φ;cosφ)
зависят от скольжения. Ток ротора I2
с увеличением скольжения возрастает,
что видно из формулы
![]() .
Причем, при x2s=ɷLp2s<r2
сила
тока ротора возрастает быстро, а при
x2s>r2
значительно
медленней.
.
Причем, при x2s=ɷLp2s<r2
сила
тока ротора возрастает быстро, а при
x2s>r2
значительно
медленней.
- магнитный поток Ф пропорционален ЭДС статора Ė1, а Ė1=Ů−İ1z1при увеличении скольжения ток статора увеличивается, ЭДС. Е1, уменьшается, значит магнитный поток Ф уменьшается.
- коэффициент мощности цепи ротора при увеличении скольжения уменьшается.
![]()
Значит,
при возрастании скольжения магнитный
поток и ток ротора увеличивается, а
коэффициент мощности уменьшается.
Выражение момента через параметры
асинхронного двигателя: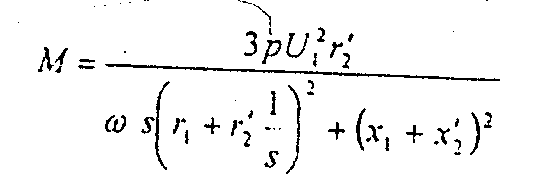
Для
определения условий максимального
момента возьмем производную
![]() приравняем
ее к нулю.
приравняем
ее к нулю.
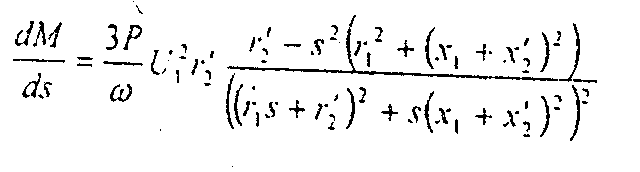
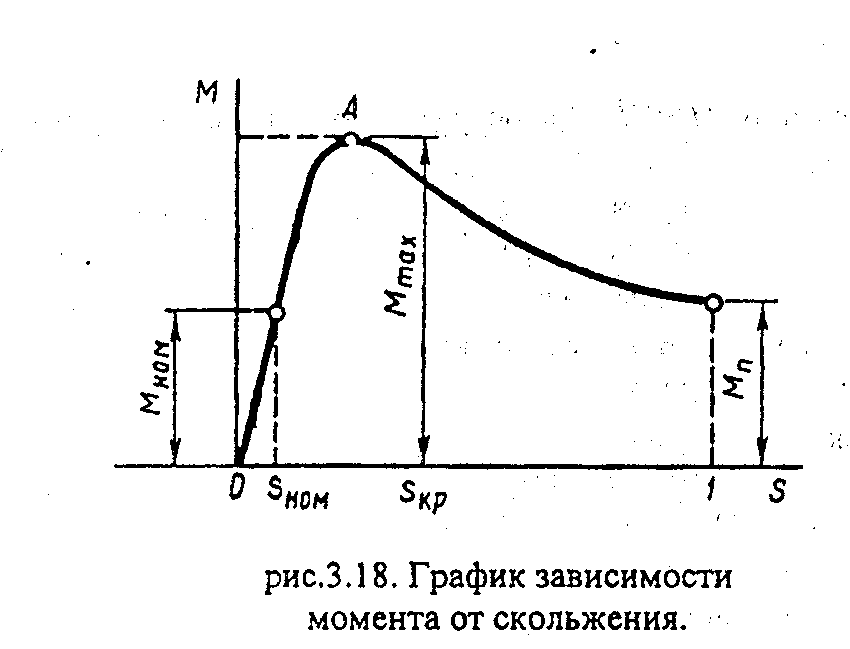
Рис. 6.18
Решив это уравнение, определим критическое скольжение, при котором момент максимален
![]()
Из полученного выражения видно, что Sкр зависит от сопротивления фазы обмотки ротора. Чем больше активное сопротивление r2’ ротора, тем ниже его скорость nкр=n0(1−Sкр).
Mmax соответствует обычно небольшим значениям скольжения, так как индуктивное сопротивление обмоток намного больше чем их активные сопротивления, Sкр= 0,04÷ 0,05. При изменении скольжения
от нуля до Sкр работа двигателя является устойчивой, так как с увеличением тормозного момента на валу, скорость вращения ротора на валу уменьшается, скольжение увеличивается, увеличивается и вращающийся момент. Восстанавливается динамическое равновесие между тормозным и вращающим моментом, (участок 1 и 2 на рис. 6.18.) Дальнейшее увеличение нагрузки (s>sкр) приведет лишь к уменьшению вращающего момента и к остановке двигателя. Подставив выражение Sкр в формулу для вращающего момента, получим выражение для максимального момента.
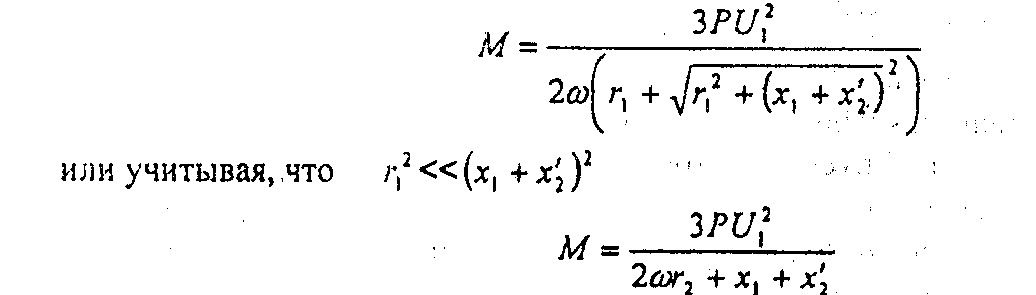
Максимальный вращающийся момент определяет перегрузочную способность двигателя Mmax в 2-2,5 раза больше Мном.
Так как Mmax не зависит от r2’, а Sк зависит, то увеличивая активное сопротивление ротора можно увеличить критическое скольжение, не изменяя максимального момента. Это используется для улучшения пусковых условий(см.З.13.). Вращающий электромагнитный момент чувствителен к изменению напряжения М~U12 . При определенном снижении напряжения двигатель вращаться не будет.
Большое значение имеет зависимость скорости двигателя от нагрузки на валу n=ƒ(М) - механическая характеристика двигателя. Эта характеристика, как видно из рис. 6.19., аналогична по форме зависимости М = ƒ(s). Скорость асинхронного двигателя незначительно снижается при увеличении вращающего момента в пределах от 0 до Мmax.
Такая механическая характеристика называется жесткой. Рабочим является участок 1,т.к. на этом участке при незначительном уменьшении тормозного момента скорость ротора увеличивается, скольжение уменьшится, вращающий момент уменьшится. Динамическое равновесие моментов Mвр=Mm восстановится, но с немного большей скоростью.
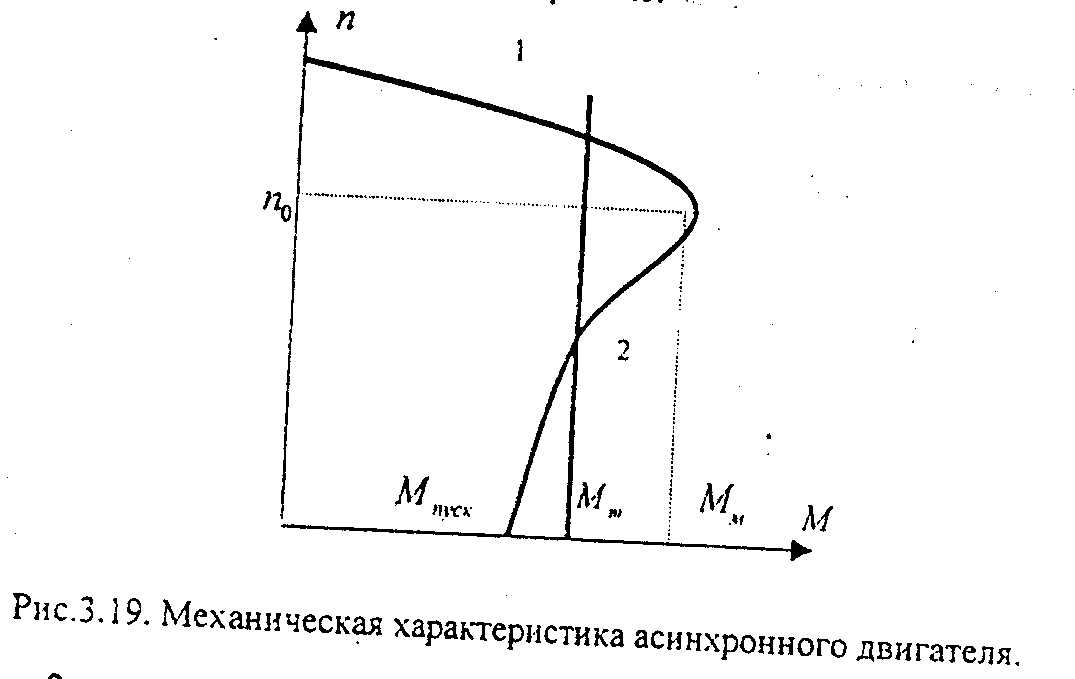
Рис. 6.19
На участке 2 при уменьшении тормозного момента скорость ротора уменьшится, что приведет к уменьшению вращающего момента и, в конце концов, к его остановке. Этот участок механической характеристики является нерабочей.