Принцип работы мп
Выделяют процессы.
обработка команды.
обработка цифровой информации.
Работа мп-ра при обработке команды управления.
При запуске МП-ра ПС устанавливается на номер первой команды программы управления. Этим номером служит номер ячейки памяти в хранится эта первая команда. Ч\з регистр адреса и буфер адреса на шине адреса выставляется цифровой код адреса. Схема управления и синхронизации формирует команду чтения, которая передается по шине управления и т.к. эта шина связана со всеми блоками, то эта команда пойдет ко всем блокам , но ее будет воспринимать тот блок на настроен адрес, обычно ПЗУ будет выдавать содержащие команды на шине данных и эта команда ч\з буфер ШД и внутреннюю шину МП-ра направляется.
Исполнительная часть команды в регистр команд. Адресная часть в программно недоступные р WZ .
Команда:
исполнительная часть: адресс1; адрес 2;
Адрес 1 – адрес получателя информации обработанной МП- ром записи в регистр W
Адрес 2 – адрес исходной информации.
Работа МП – ра по обработке исходных данных.
При обработке одних из циклов выполнении команды содержания регистра Z переносится в регистр адреса. На шине адреса выставляется адресс источника информации. Другим минимальным циклом схема превращения и синх-ци формирует команду чтения по, которой на шине данных появляется числовой сигнал, который формирует там источник информации; ч\з буфер данных поступает в аккумулятор и в один из буферов АЛУ. Второй операнд аналогично направляется последующей командой программы буфер2. Оба операнда обрабатываются АЛУ по команде одного из машинных циклов. Результат обработки направляется в аккумулятор из которого информация может быть направлена по необходимому адресу третьей командой программы В этом случае содержание аккумулятора выставляется на буфер шины данных и за тем в шину данных.
Анализ вариантов автоматического регулирования нагрузки на приводе выемочных машин.
Регулировать не обходимо следующие параметры:
скорость подачи Vпод
скорость резания Vрез
4 варианта способов автоматического управления:
1.стабилизация параметров
Все параметры остаются постоянными:
Vпод = const
Vрез = const
Рэф – Vаг
Достигается за счет завышения мощности привода. Перегрузки привода компенсируется за счет рабочей нагрузочной характеристики привода.
Вариант целесообразен, если выемочная машина работает в условиях относительной стабильности по крепости угля.
2. экстремальный вариант.
Vпод =const
Vрез = Vаг
Р эф = min
В структуру системы управления вводится регулируемый привод резания, который поддерживает мощность привода на минимальном уровне.
«-» недостаточная загрузка привода.
3. стабилизация мощности.
Vпод = Vаг
Vрез = const
Р эф = const
К – комбайн
Др – двигатель резания.
Дн – датчик нагрузки.

4. двоичное экстремальное регулирование.
Vпод - Vаг
Vрез - Vаг
Рэф – оптим.
Одновременно регулируется Vпод и Vрез.
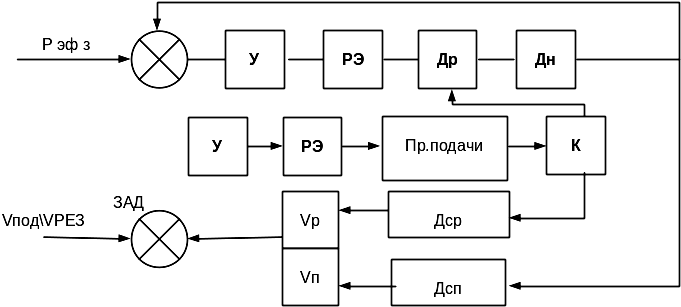
контур по регулированию Рэф.
контур по соотношению скорости Vn и Vр
В 1 - ом контуре сравнивается сигнал с Дн и сигнал Рэф. зад.
Во 2-ом контуре задается соотношение Vn\Vp и рассогласование подается на регулятор скорости подачи, а скорость резания является подчиненной от скорости подачи.
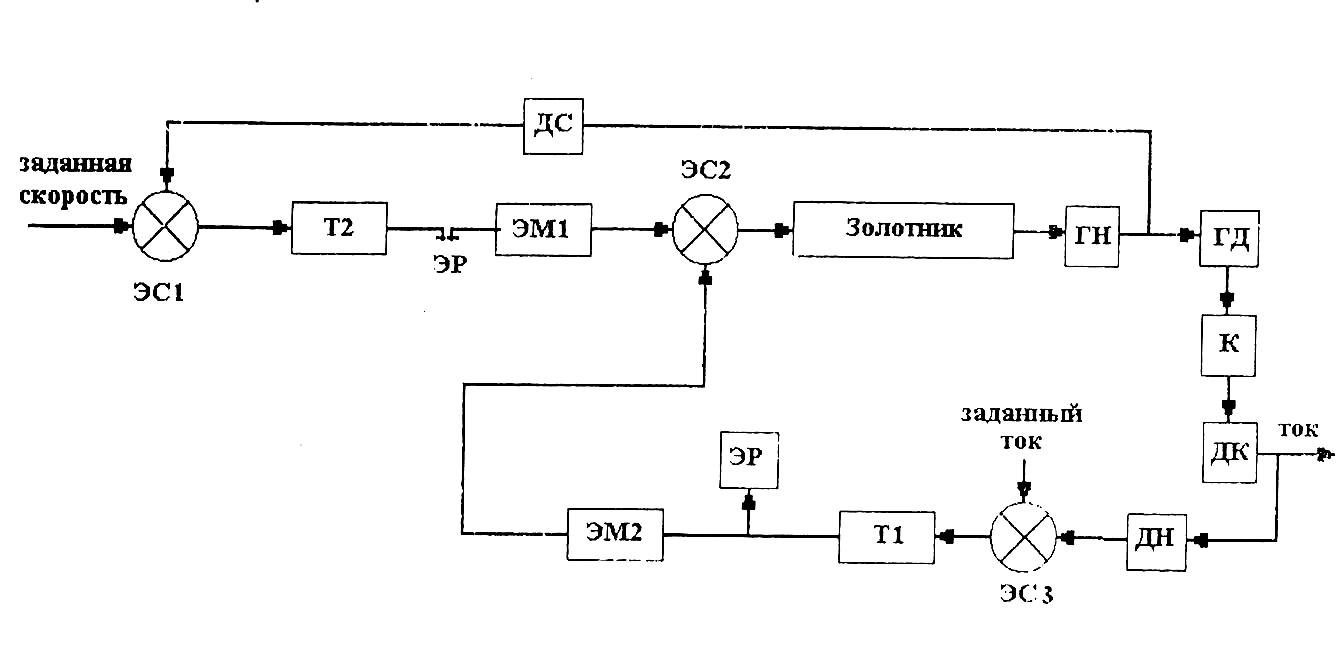
Структурная схема и принцип работы регулятора нагрузки на приводе выемочной машины типа САДУ-2.
Чаще машины работают по двойной экстремальной схеме управления. Примером является Аппаратура САДУ-2 (система автоматического управления двигательной установкой). Имеет след структуру:
Система предназначена для автоматического управления нагрузкой двигателя по заданному Рэф и Vn, поэтому 2 контура управления по заданной Vn, и контур управления по заданной Рэф.
САДУ – 2 должен обеспечить максимальную Vn, при максимальной нагрузке на привод. Контур упр-я по Рэф имеет выше приоритет чем контур по Vn
Если фактическая мощность ниже чем заданная то в основном работает контур регулирования по скорости. На ЭС1 подаются Vзад и Vфак (который снимаются с привода подачи). Если Vфак < Vзад, срабатывает тригер Т2, который включает эл. магнит2 (ЭМ2) который увеличивает через золотник подачу жидкости к гидродвигателю подачи, что приводит к увеличению скорости подачи до тех пор пока не не станет Vфак = Vзад.
При отсутствии сигнала на Т2 (при Vф>Vзад) Т2 отключитсся и гидронасос снижает производительность. Увеличение Vпод будет пока Vзад = Vфак или пока нагрузка на двигатель комбайна не превысит Iф >Iзад, при Iф >Iзад на ЭС3, то срабатывают электронное реле ЭР и триггер Т1, который включает ЭМ1. ЭР являетсяся реле приоритета, т.е. оно отключает контур управления скорости размыкания свои контакты и скоростью подачи управляет ЭМ1, который всегда уменьшает скорость подачи до тех пор пока Рзад и Рфак (Iф =Iзад) не сравняются.