Основные требования к автоматизации шахтного водоотлива и реализация их в аппаратуре «уав». Уав (устройство автоматизации водоотлива) .
Основное требование: Автоматическая управляющая заливка насоса
РУД-реле аварийного уровня;
РУН- реле повышенного уровня;
РУВ- реле верхнего уровня;
РНУ- реле нижнего уровня;
При замыкании DВУ срабатывает РУВ, которое передает сигнал на РПУ (реле повторения уровня) это реле передает сигналы на включение пускателя заливочного насоса (ПЗН) и на запуск реле времени т.к заливка осуществляется по: 1 контролю давления, и по 2 времени заливки.
Заливочный насос создает давление в главном насосе НГ, которое контролируется реле давления РДВ. При достижении определенного давления, срабатывает реле главного насоса (РГН), которое запускает ГН, при этом контролируется производительность насоса с помощью РПН. При достижении заданной производительности или от реле времени отключается заливочный насос или включается привод задвижки. Положение задвижки определяется датчиками.
РЗ- реле защиты для отключения привода главного насоса, в случае перегрева подшипников насоса или двигателя ч\з датчики температуры (ДТ) и в случае перегрева обмотки двигателя. РЗ подает сигнал РГН и происходит последовательное отключение привода.
Срабатывает привод задвижки, который закрываясь подает сигнал на отключение привода ГН.

Требования к автоматизации шахтных водоотливных установок:
1. Автоматизированную контролируемую заливку насосов перед запуском.
2. Автоматизированное включение очередного насоса при достижении верхнего уровня воды
в водосборнике и неприрывнуую его работу до тех пор пока уровень воды не достигнет нижней отметки.
3. Автоматизированный контроль за работающим насосом и его аварийное отключение, если он
не достигнет заданной произодительности или если он перегрелся.
4. Автоматизированное включение в работу резервного насоса при отказе в работе основного насоса
или при недостаточной его производительности в случае увеличения водопритока.
5. Подача звука и светового сигнала на пульт диспетчера о состоянии водоотливной установки, аварийном
уровне воды в водосборнике и при отказе в работе насосов.
6. Дистанционное включение насосной установки с пульта диспетчера и перевод его в ручное управление
только из машинного зала.
7. Блокировка от повторного включения остановки насоса с пульта диспетчера.
8. Автоматизированное управление работой задвижек.
Схема датчикой:
I - заливной насос;
II - основной насос;
III - задвижка;
IV - став. напорных труб;
V - электродвигатель.
1 - Датчик температуры подшипников двигателя и насоса;
2 - Датчик давления воды в насосе;
3 - Датчик положения задвижки;
4 - Датчик производительности насоса;
5 - датчик температуры обмомток двигателя
Принципы автоматического поддержания давления на забой при бурении нефтяные и газовых скважин.
Т.к глубина бурения составляет сотни метров, но вес буровой колонны очень велик, а долото не может выдерживать большие нагрузки, для этого большая часть подвешивается на полиопасной системе.
Степень натяжения р определяет степень разгрузки. Величина натяжения определяется тормозным моментом буровой лебедки и замеряется спомощью датчика ГИВ-6.
При огибании возникает реакция Р, которая воспринимается гидросистемой, которая замеряется электроконактным манометром, Для любой глубины бурения есть таблица значений.

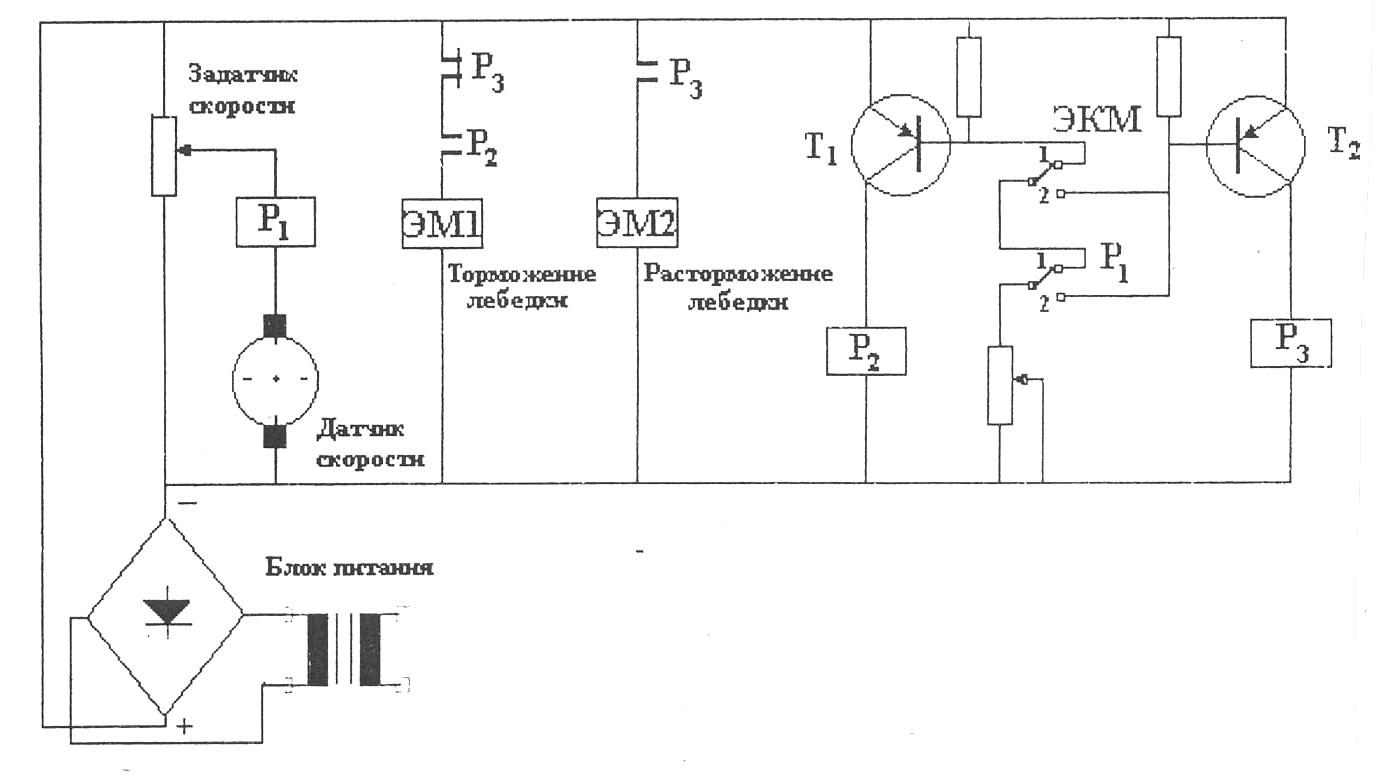
Эта система управляет работой буровой установки по скорости бурения и по нагрузке на долоте. Нагрузка является приоритетным параметром. Если нагрузка на долоте не превышает заданного значения регулирование идет только по скорости. Задатчиком скорости является потенциометр Р1, а датчико тахогенератор (ТГ). ТГ и Р1 включены встречно, при этом поляризованное реле Р1 замыкает контакт 1, а электроконтактный манометр т.к недогружен тоже в положение 1, при этом подается отрицательный потенциал на базу Т1, который работает как ключ и подключает реле Р2, который ч\з свои контакты включает ЭМ1, который растормаживает буровую лебедку, при этом величина усилия дололото увеличивается, за счет этого увеличивается скорость бурения.
Если Vфак> Vзад, то реле Р1 замыкает контакт 2 и напряжение смещения подается на базу Т2 при этом включается Р3, которое блокирует ЭМ1 и включает ЭМ2, которое увеличивает тормозной момент буровой лебедки и уменьшает усилие на долоте и уменишается скорость бурения. При превышении давления срабатывает ЭКМ и переключает контакты в положение 2 и включается Р3.