

4.3. Порядок выполнения работы
1. C помощью штангенциркуля измерить диаметр цилиндрической поверхности d шкива, а с помощью линейки - диаметр D диска 5 раз в разных местах и рассчитать значения r и R.
2. Намотать нить на шкив (груз поднимется в верхнее положение). С помощью секундомера 5 раз измерить время t, в течении которого груз падает с высоты h.
3. По формулам (4.11) и (4.12) определить средние значения момента инерции и сравнить их между собой.
4. Рассчитать абсолютную погрешность измерения момента инерции по формуле:
 .
(4.13)
.
(4.13)
где![]()
п – число измерений.
5. Рассчитать относительную погрешность определения момента инерции по формуле:
J = (J / J ср) 100 % . (4.14)
4.4. Содержание отчета
1. Номер и название лабораторной работы.
2. Цель работы.
3. Краткий конспект теоретического обоснования работы.
4. Оборудование.
5. Схема к исследованию момента инерции твердого тела.
6. Результаты замеров и вычислений по форме:
№ п/п |
di, мм |
ri, мм |
r = |ri-rср|, мм |
Di, мм |
Ri, мм |
R=|Ri-Rср|, мм |
ti, с |
t=|ti-tср|, с |
1. 2. 3. 4. 5. |
|
|
|
|
|
|
|
|
сумма |
|
|
|
|
|
|
|
|
ср.зн. |
|
|
|
|
|
|
|
|
7. Определение момента инерции твердого тела по формулам (4.11), (4.12).
8. Вычисление погрешности опыта по формулам (4.13), (4.14).
6. Окончательные результаты в виде:
J = (J ср J) кг м2, ε,%;
r = (rср rmax) м.
R = (Rср Rmax) м.
7. Выводы.
4.5. Контрольные вопросы
1. Что такое линейная и угловая скорости? Какова связь между ними?
2. Что такое момент силы, момент инерции, момент импульса ?
3. Как определяются моменты инерции симметричных тел - шара, диска, цилиндра?
4. Каково основное уравнение вращательного движения?
Лабораторная работа № 5
Изучение закона сохранения энергии
Цель работы: Экспериментально проверить закон сохранения и превращения энергии.
Оборудование: Датчик силы U11356; штатив; груз, подвешенный на нити; система обработки данных 3B NETlogTM; соединительный кабель с 8-контактными разъемами типа miniDIN; компьютер.
5.1. Теоретическое обоснование работы
Энергия – универсальная мера различных форм движения и взаимодействия. С различными формами движения материи связывают различные формы энергии: механическую, тепловую, электромагнитную, ядерную и др. В одних явлениях форма движения материи не изменяется (например, горячее тело нагревает холодное), в других — переходит в иную форму (например, в результате трения механическое движение превращается в тепловое). Однако существенно, что во всех случаях энергия, отданная (в той иди иной форме) одним телом другому телу, равна энергии, полученной последним телом.
Кинетическая энергия механической системы – это энергия механического движения этой системы. Так, например, тело массой m, движущееся со скоростью υ, обладает кинетической энергией
![]() (5.1)
(5.1)
Из формулы (5.1) видно, что кинетическая энергия зависит только от массы и скорости тела, т. е. кинетическая энергия системы есть функция состояния ее движения.
Потенциальная энергия – энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними.
Пусть взаимодействие тел осуществляется посредством силовых полей (например, поля упругих сил, поля гравитационных сил), характеризующихся тем, что работа, совершаемая действующими силами при перемещении тела из одного положения в другое, не зависит от того, по какой траектории это перемещение произошло, а зависит только от начального и конечного положений. Такие поля называются потенциальными, а силы, действующие в них – консервативными. Если же работа, совершаемая силой, зависит от траектории перемещения тела из одной точки в другую, то такая сила называется диссипативной. Ее примером является сила трения.
Тело, находясь в потенциальном поле сил, обладает потенциальной энергией Eп. Работа консервативных сил при элементарном (бесконечно малом) изменении конфигурации системы равна приращению потенциальной энергии, взятому со знаком минус, так как работа совершается за счет убыли потенциальной энергии:
dA = - dE. (5.2)
Конкретный вид функции Еп зависит от характера силового поля. Например, потенциальная энергия тела массой т, поднятого на высоту h над поверхностью Земли
Еп = mgh, (5.3)
где высота h отсчитывается от нулевого уровня, для которого Eп0=0. Выражение (5.3) вытекает непосредственно из того, что потенциальная энергия равна работе силы тяжести при падении тела с высоты h на поверхность Земли.
Так как начало отсчета выбирается произвольно, то потенциальная энергия может иметь отрицательное значение (кинетическая энергия всегда положительна). Если принять за нуль потенциальную энергию тела, лежащего на поверхности Земли, то потенциальная энергия тела, находящегося на дне шахты (глубина h' ), Еп= -mgh'.
Потенциальная энергия упругодеформированного тела
![]() .
(5.4)
.
(5.4)
Полная механическая энергия системы – энергия механического движения и взаимодействия
Е = Ек + Еп ,
т. е. равна сумме кинетической и потенциальной энергий.
Закон сохранения энергии – результат обобщения многих экспериментальных данных. Идея этого закона принадлежит М. В. Ломоносову (1711—1765г.г.), изложившему закон сохранения материи и движения, а количественная формулировка закона сохранения энергии дана немецким врачом Ю. Майером (1814–1878г.г.) и немецким естествоиспытателем Г. Гельмгольцем (1821 – 1894г.г.), которое представляется в виде:
Е = Ек + Еп = const, (5.5)
Выражение (5.5) представляет собой закон сохранения механической энергии: в системе тел, между которыми действуют только консервативные силы, полная механическая энергия сохраняется, т. е. не изменяется со временем.
Механические системы, на тела которых действуют только консервативные силы (внутренние и внешние), называются консервативными системами. Закон сохранения механической энергии можно сформулировать так: в консервативных системах полная механическая энергия сохраняется.
В консервативных системах полная механическая энергия остается постоянной. Могут происходить лишь превращения кинетической энергии в потенциальную и обратно в эквивалентных количествах так, что полная энергия остается неизменной. Этот закон не есть просто закон количественного сохранения энергии, а закон сохранения и превращения энергии, выражающий и качественную сторону взаимного превращения различных форм движения друг в друга. Закон сохранения и превращения энергии – фундаментальный закон природы, он справедлив как для систем макроскопических тел, так и для систем микротел.
Существует еще один вид систем – диссипативные системы, в которых механическая энергия постепенно уменьшается за счет преобразования в другие (немеханические) формы энергии. Этот процесс получил название диссипации (или рассеяния) энергии. Строго говоря, все системы в природе являются диссипативными.
В системе, в которой действуют также неконсервативные силы, например, силы трения, полная механическая энергия системы не сохраняется. Следовательно, в этих случаях закон сохранения механической энергии несправедлив. Однако при «исчезновении» механической энергии всегда возникает эквивалентное количество энергии другого вида. Таким образом, энергия никогда не исчезает и не появляется вновь, она лишь превращается из одного вида в другой.
Р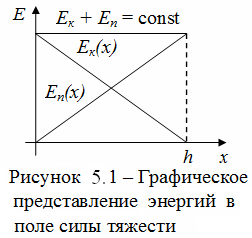 ассмотрим
графическое представление потенциальной,
кинетический и полной энергии для тела
в однородном поле тяжести (рис. 5.1).
ассмотрим
графическое представление потенциальной,
кинетический и полной энергии для тела
в однородном поле тяжести (рис. 5.1).
Для изучения закона сохранения энергии рассмотрим движение груза, подвешенного на нити и отклоненной на угол α.
1. Рассмотрим случай (рис. 5.2а), когда груз с нитью отклонили на угол 900 и отпустили.
В точке А на груз действуют две силы: сила тяжести Fт = mg и сила натяжения нити Т. Основной закон динамики имеет вид:
mа = Т- mg. (5.6)

Рисунок 5.2 – Движение груза, подвешенного на нити: а) при угле отклонения α=900; б) при угле отклонения α < 900
Веревка испытывает
максимальное натяжение в точке А,
так как в этой точке нормальное ускорение
имеет максимальное значение
![]() ,
и силы натяжения и тяжести направлены
вдоль одной прямой в противоположные
стороны. Следовательно,
,
и силы натяжения и тяжести направлены
вдоль одной прямой в противоположные
стороны. Следовательно,
![]() ,
(5.7)
,
(5.7)
где m - масса груза, υA- скорость груза в точке А, g – ускорение свободного падения, l - длина веревки, Т – сила натяжения нити.
Датчик силы фиксирует изменение силы натяжения нити. По максимальным значениям силы натяжения нити можно определить скорость груза в точке А по формуле:
![]() .
(5.8)
.
(5.8)
Скорость в точке
А
можно также определить из закона
сохранения механической энергии. В
точке В
полная механическая энергия ЕВ
= Еп
= mgh,
где h
= l
. Ек
= 0. В точке А
механическая энергия
![]() ,
а Еп
= 0. Тогда по закону сохранения энергии
получим:
,
а Еп
= 0. Тогда по закону сохранения энергии
получим:
![]() = mgh.
(5.9)
= mgh.
(5.9)
Из формулы (5.9 ) находим выражение скорости груза в точке А в виде:
![]() .
(5.10)
.
(5.10)
2. Рассмотрим случай (рис 5.2б), когда груз с нитью отклонили на угол α < 900 и отпустили. Аналогично первому случаю, скорость груза можно найти по формуле (5.8). Зная скорость груза в точке А по формуле (5.10) можно найти высоту h (рис. 5.2б), с которой был отпущен груз. Из рисунка видно, что
cosα= OC/ l,
где ОС = l – h.
Или
cosα= 1 – h / l. (5.11)
Тогда угол, на который был отклонен груз, можно найти по формуле
α = arcсos( 1 – h/ l). (5.12)