

Приборов
§ 8. Принцип действия
При конструировании гидроакустических приборов используются и учитываются основные свойства акустических волн:
распространение в однородной водной среде с постоянной скоростью;
изменение направления и скорости при распространении в неоднородной среде;
отражение от объектов и сред, акустические свойства которых отличаются от свойств той среды, в которой происходит распространение волн;
создание суммарного акустического поля из волн одной частоты;
огибание препятствий, размеры которых меньше длины волны.
С учетом характера водной среды и предъявляемых требований к гидроакустическим приборам в их конструкциях имеются некоторые особенности:
применение акустических волн повышенной частоты;
использование преимущественно импульсного режима работы передающих устройств;
создание направленных и вращающихся диаграмм излучения.
Основные свойства волн — распространение в водной среде «с постоянной скоростью и отражение от разнородных сред — позволяют решать задачи по определению глубины места, обнаружению промысловых объектов промысла, определению их координат. Глубина места, расстояние до объектов промысла определяются по известной формуле О = с1/2, где I — время распространения акустических волн до грунта или до объекта промысла и обратно.
Для измерения глубины под килем судна применяются указатели глубин, самописцы, электронные индикаторы. Современные эхолоты позволяют измерять практически любые глубины.
Для получения достаточной мощности генератора при его
•сравнительно небольших габаритных размерах и потребляемой мощности применяются импульсный режим работы и направленное излучение. При такой работе генератором эхолота формируются кратковременные мощные посылочные импульсы с частотой повторения, зависящей от выбранного диапазона. Импульсный режим работы позволяет накапливать энергию между двумя очередными посылками и применять одну приемо-пере-дающую антенну. Управляет посылками регистрирующий прибор или специальный блок запуска — синхронизатор.
Рассмотрим простейшую схему измерения глубины места эхолотом. Эхолоты применяются не только для измерения глубин, но и для обнаружения косяков рыб под килем судна, определения их вертикальной протяженности, глубины погружения. В качестве регистрирующих приборов в эхолотах применяются самописцы, электронные и цифровые индикаторы, указатели глубины. Самописцы применяются как в рыбопоисковых, так и в навигационных эхолотах. Записывающим устройством в самописцах являются металлическая линейка, подвижное перо или
•система неподвижных перьев, соприкасающихся со специальной электрохимической или электротермической бумагой (рис. 11). В самописце с подвижным пером через систему передач электрическим двигателем (О) приводится во вращение лента, уложенная в направляющих роликах. На ленте укрепляется записывающее перо и кулачковая посылочная группа. В момент нахождения пера самописца против нуля шкалы посылочным кулачком замыкаются контакты К в цепи генератора зондирующих импульсов и происходит излучение акустических волн.
Эхо-сигнал после приема и усиления поступает на перо самописца, и на бумаге производится запись глубины, косяков
рыб. Бумага укладывается в валики и протягивается двигателем с заданной постоянной скоростью. Для расширения диапазона измеряемых глубин в самописцах применяются схемы фа-зирования. При фазировке посылка импульса происходит раньше времени прихода пера на нуль шкалы глубины. Время задержки записи или время запуска посылочного генератора можно плавно или дискретно изменять.

В навигационных эхолотах для записи иногда применяется вращающийся барабан с укрепленной металлической спиралью. Спираль соприкасается с бумагой только в одной точке. В момент нахождения записывающей точки на нуле происходит излучение импульса передающей антенной. Сигнал, отраженный от грунта, поступает на приемную антенну, а после усиления—на спираль, записывающая точка которой перемещается от нуля на некоторое расстояние, зависящее от глубины места.
Рис. 11. Схема измерения глубинш самописцем
В некоторых эхолотах для записи глубины применяются многоперьевые самописцы. Группа неподвижных перьев располагается по всей ширине бумаги, которая протягивается с определенной скоростью лентопротяжным механизмом. Работа такого самописца заключается в следующем. Опорный генератор совместно с делителем формирует остроконечные счетные (тактовые) импульсы, а блок запуска самописца вырабатывает запускающие импульсы. Запускающие импульсы (ЗИ) поступают на генератор зондирующих импульсов в передатчике и на счетчик импульсов, который с этого момента начинает пропускать на дешифратор и далее на схемы совпадений тактовые импульсы (рис. 12). Схемы совпадений связаны с перьями, однако сигнал для записи поступит на то или иное перо только в том случае* если тактовый импульс и эхо-сигнал придут на схему совпадения одновременно. Схем совпадений столько, сколько перьев-(в самописцах их более 200). Первое перо находится против-нуля шкалы глубины, а последнее — против максимального деления этой шкалы. Время поступления эхо-сигнала на схему совпадения зависит от измеряемой глубины.
23:
В гидролокаторах принцип измерения расстояний до объектов промысла остается таким же, однако в них применяются антенны, обеспечивающие посылку акустических волн как в вер-
От Улика упрабления
Опорный генератор
|
*<*
|
Формирователь итульсов
|
|
Счетчик тактовых импульсов
|
|
Дешифратор
|
|
|||
|
|
|
||||||||
На запуск
|
|
'
|
|
|
|
|||||
Блок 'запуска
|
Схе собпа
|
МП Зения
|
_ _ -^
|
Мноеоперьебая линейка самописцй
|
||||||
передатчика
|
|
"»
|
||||||||
Видеосигнал
|
|
|||||||||
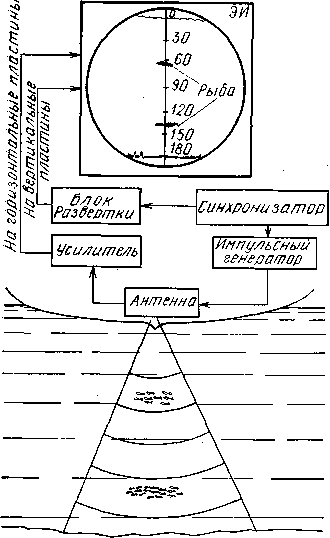
Рис. 12. Принципиальная схема измерения глубины многоперьевым самописцем
Рис. 13. Схема измерения глубины электронным индикатором
тикальном, так и в горизонтальном направлении. В качестве индикаторов применяются самописцы, электронные индикаторы, дисплеи. В электронных индикаторах на электронно-лучевой трубке (ЭЛТ) образуется линейная или радиальная развертка (рис. 13). Принцип измерения расстояний заключается в следующем. Синхронизатор через определенные промежутки времени формирует запускающие импульсы. ЗИ поступают на генератор импульсов, формирующий мощный высокочастотный импульс, и на блок развертки индикатора, обеспечивающий ее образование на экране индикатора. Начало излучения акустических волн и начало движения луча развертки от края трубки вверх (или вниз) совпадают. Луч развертки перемещается по экрану с определенной скоростью, зависящей от выбранного масштаба. Отраженный сигнал после усиления поступает на ЭЛТ, вызывая амплитудную или яркостную отметку цели, напротив которой по шкале снимается величина расстояния. Перемещение диаграммы направ-
24
ленности в гидролокаторе по горизонту и использование радиальной развертки индикатора, вращающейся синхронно с диаграммой, позволяет определять направление на объект промысла.
В некоторых гидролокаторах и навигационных эхолотах применяются цифровые индикаторы расстояний или глубины. В цифровом индикаторе измеряемая величина представляется в виде числа на отсчетном устройстве. Наибольшее распространение получили цифровые индикаторы последовательного счета, в которых аналоговая измеряемая величина преобразуется в пропорциональное число импульсов (число-импульсный код) и затем в другой (обычно двоично-десятичный) код.