6. Фотоэлектрические датчики
Оптические фотоэлектрические датчики используются для оценки точного положения объекта бесконтактным способом (при использовании дополнительных средств - например счетчика-секундомера, возможно определение скорости движения деталей, частей оборудования, средств автоматизации).
Преимущества оптических сенсоров
- не имеет значения, из какого материала состоят объекты измерения,
- по сравнению с емкостными датчиками или индуктивными датчиками, фотоэлектрические сенсоры имеют гораздо большее расстояние срабатывания,
- имеют малые габаритные размеры.
Фотоэлектрические датчики состоят из приемника и передатчика, расположенных в отдельных корпусах (или одном корпусе). Основа приемника - фотоэлемент, может быть с внутренним и внешним фотоэффектом. При внутреннем фотоэффекте фотоэлемент представляет собой вакуумный баллон с двумя электродами (фотодиод). Металлический анод имеет форму пластинки расположенной против центра катода. Катод - фоточувствительный слой, нанесенный на стекло колбы. Под влиянием светового потока электроны покидают катод и образуют фототок в электрической цепи.
Фотоэлементы с внутренним фотоэффектом представляют собой металлическую пластину с решеткой на которую нанесен тонкий слой полупроводника (н-р, селена). Под действием света в селене появляются свободные электроны, увеличивающие его проводимость. Соответственно меняется сила тока в цепи, о чем можно судить по напряжению на нагрузочном сопротивлении.
Фотодиоды только преобразуют свет в электрический ток, но не усиливают его, в отличие от лавинных фотодиодов и фототранзисторов.
По принципу действия фотоэлектрические датчики делятся:
1) Рассеянного отражения
В этих фотоэлектрических датчиках световое излучение отражается непосредственно от сканируемого объекта и затем поступает обратно на фотоприемник датчика, где происходит обработка сигнала.
2) Обратного отражения
Работает по двухходовой схеме. Отраженный световой поток от датчика отражается зеркальным отражателем и поступает обратно на приемник фотоэлектрического датчика, где происходит сравнение и обработка сигнала.
Преимущества:
- большие расстояния до определяемых объектов
- однокорпусное исполнение.
В этой серии датчиков есть модели для определения прозрачных пленок, стеклянных изделий и блестящих объектов.
3) Работа на просвет
Фотоэлектрические датчики, состоящие из приемника и передатчика, расположенных в отдельных корпусах. Данный тип датчиков позволяет определять наличие объектов на больших расстояниях.
4) C использованием оптического волокна:
- на просвет и на отражение;
- улавливающие отражение боковой поверхностью и торцевой поверхностью
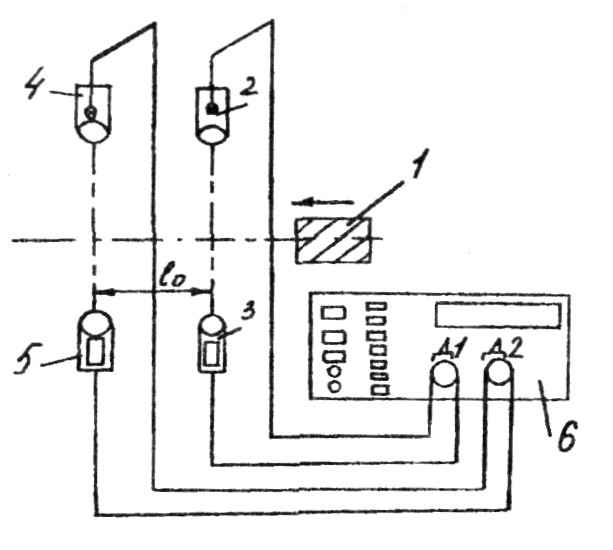
Средняя скорость движения объекта между
фотодатчиками:
![]() ,
,
где ![]() - расстояние между датчиками Д1 и Д2, м;
- расстояние между датчиками Д1 и Д2, м;
![]() - время, определяемое счётчиком-секундомером,
с.
- время, определяемое счётчиком-секундомером,
с.
Достоинством такого способа измерения является отсутствие непосредственного механического контакта объекта с измерительной системой.
|
|
Рис. 1. Схема определения скорости объекта: 1 – движущийся объект; 2 – светоизлучатель датчика Д1; 3 – фотоприёмник датчика Д1; 4 – светоизлучатель датчика Д2; 5 – фотоприёмник датчика Д2; 6 – счётчик-секундомер |
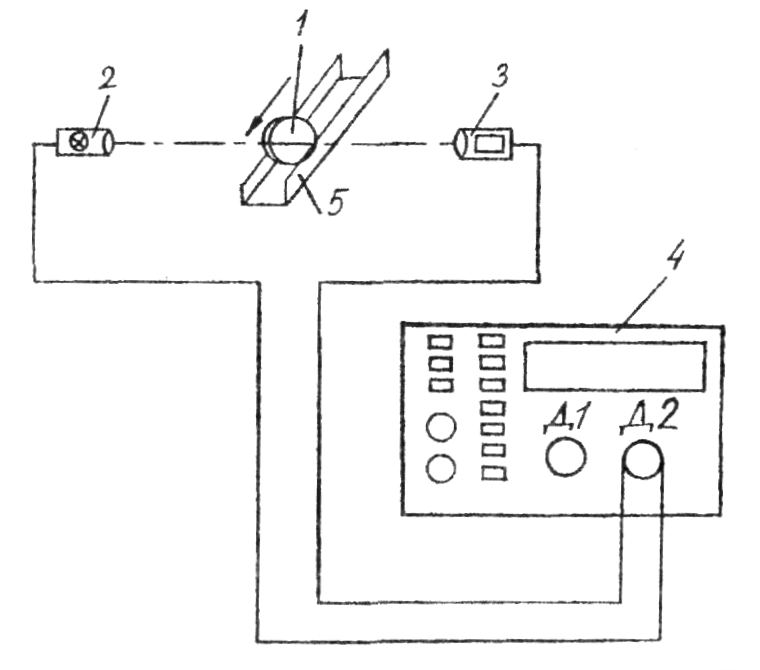
Рис. 2. Схема автоматического счёта деталей: 1 – деталь; 2 – светоизлучатель датчика Д2; 3 – фотоприёмник датчика Д2; 4 – счётчик секундомер; 5 – лоток
|