

Классификация и конструктивные особенности
Грузоподъемными называют машины, которые предназначены для Н подъема и перемещения грузов и людей.
Грузоподъемные машины можно разделить на три основные группы: 1) грузоподъемные устройства, к которым относят домкраты, лебедки, полиспасты и тали; 2) грузоподъемные краны, главными из которых являются краны мостового типа, стрелового типа, консольные, краны-штабелеры; 3) подъемники.
Домкраты реечные, винтовые и гидравлические (рис. 1, а—в) перемещают груз только в вертикальном направлении с помощью рейки 1, винта 4 и поршня 5, установленных в корпусах 2 и снабженных приводом в виде рукояток 3.
Полиспаст (рис. 1, г) выполнен в виде неподвижной 6 и подвижной обойм 8 с крюками и роликами (блоками), которые охватываются канатом 7. Неподвижная обойма закрепляется на какой-либо конструкции, а на крюк подвижной обоймы навешивается груз. К свободному концу каната прикладывается тяговое усилие.
Лебедка имеет опорную конструкцию 11, на которой смонтированы барабан 9, передаточный механизм (с зубчатыми передачами) 10 и привод, который может быть ручным от рукоятки 12 (рис. 1, д) или электрическим. Канат 13 наматывается на барабан. Его закрепляют на грузе или запаковывают в полиспаст.
Цепная таль (рис. 2, а) имеет корпус 1, в котором смонтирована звездочка для грузовой цепи с крюковой подвеской 2. Привод звездочки осуществляется через зубчатые или червячные передачи с тормозным устройством от тягового колеса 4 с помощью тяговой цепи 3. Таль за крюк подвешивается к какой-либо конструкции и может перемещать груз только вертикально. Эта же таль подвешена к тележке 5 (рис. 2, б), установленной на двутавре, и может перемещать груз в горизонтальном направлении с помощью механизма передвижения тележки, приводимого в действие тяговым колесом с помощью тяговой цепи.
Канатная таль (рис. 2, в) имеет корпус 1, в котором смонтированы барабан 6 для каната с крюковой подвеской 2, редуктор с тормозным устройством 9 и приводной электродвигатель 7. Таль может быть подвешена к тележке 5 механизмом передвижения или установлена стационарно. Управление механизмами подъема груза н передвижения тали осуществляется с помощью подвесного пульта 8.
Рис.
1 Грузоподъемные устройства:
соответственно
реечный, винтовой н гидравлический
домкраты;
г —
полиспаст; д
—
лебедка с ручным приводом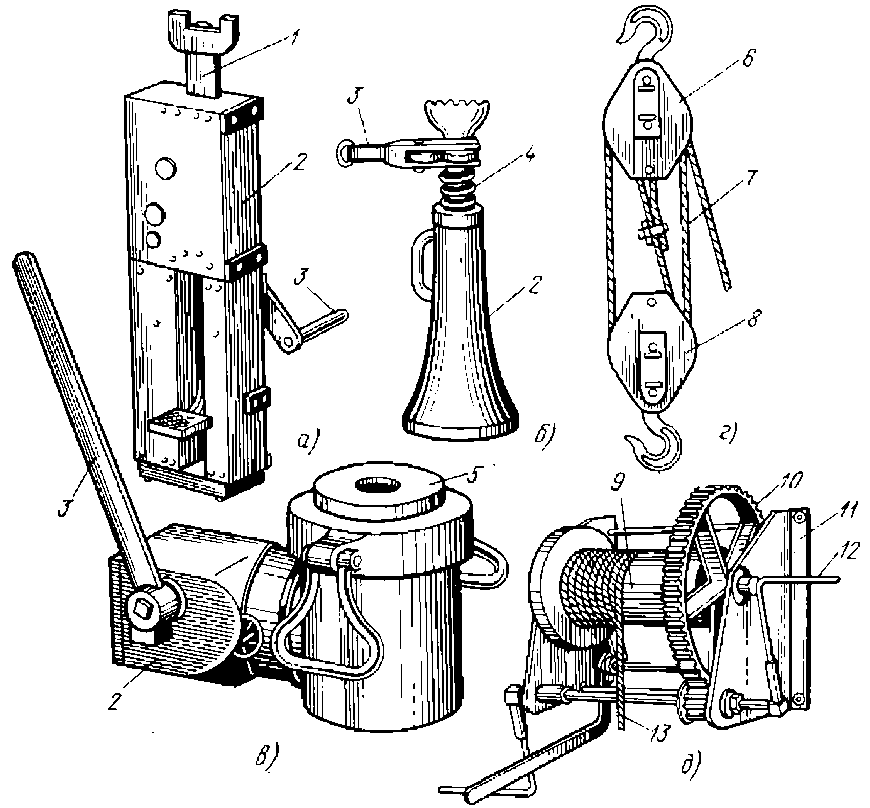
К кранам мостового типа относят мостовые (рис. 3, а) и козловые (рис. 3, б) краны, которые включают несущую стальную конструкцию (мост) 3 с ходовыми колесами 1 и механизм передвижения 2. Колеса опираются на крановые рельсовые пути.
По мосту передвигается грузовая тележка 4, на раме которой смонтированы механизм подъема груза с крюком и механизм передвижения тележки. Благодаря трем механизмам груз имеет три поступательных перемещения и передвигается в любую точку обслуживаемого краном цеха, склада и др.
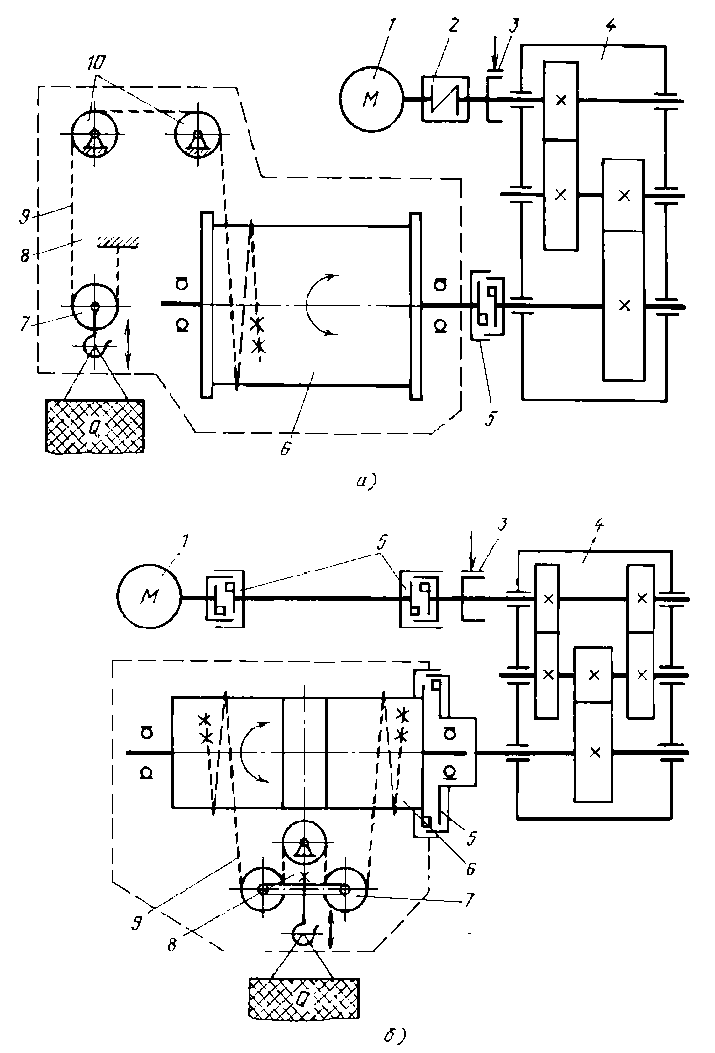
Типовой механизм подъема груза (рис. 4, б) состоит из двигателя 1, тормозного устройства 3, передаточного механизма 4 и барабана 6, которые соединены зубчатыми муфтами 5. На барабан намотан канат 9 полиспаста 8, который соединен с блоками крюковой подвески 7. Груз с помощью строп подвешивается на крюк подвески. Двигатель может быть электрическим, гидравлическим; при редкой работе крана применяют ручной привод. Тормозное устройстве предназначено для затормаживания механизма с грузом и удерживания поднятого груза в подвешенном состоянии. Иногда тормозное устройство используется для регулирования скорости опускания груза. Передаточный механизм увеличивает крутящий момент, передаваемый от двигателя к барабану, и одновременно уменьшает частоту вращения барабана. В качестве передаточного механизма применяют редукторы и открытые зубчатые передачи. Исполнительным органом механизма является барабан с полиспастом и крюковой подвеской (на рисунке показан штриховыми линиями).
Рис.
2. Тали:
а
— стационарная цепная ручная; б —
передвижная ценная ручная; в — передвижная
канатная электрическая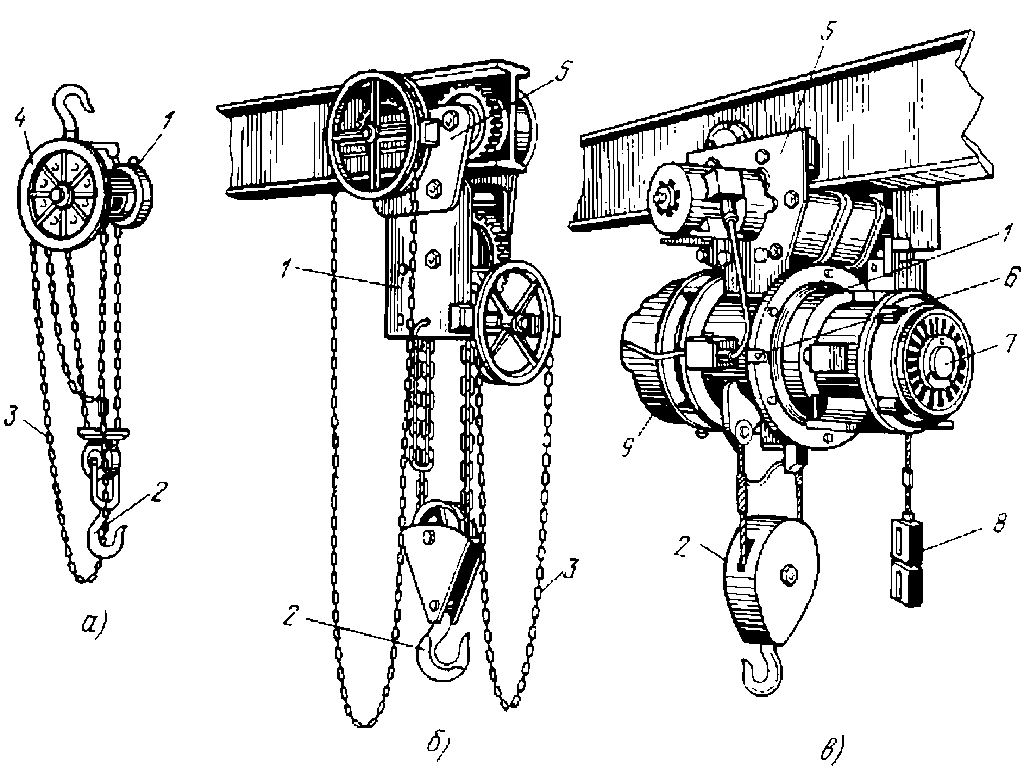
Механизм передвижения крана (рнс. 5, а) состоит из двигателя 2, передаточного механизма 4, тормозного устройства 1 и приводного 7 и неприводного 8 колес. Элементы механизма соединены муфтами 3 и 5. Движение осуществляется за счет сцепления приводного колеса 7 с рельсом 6. Тормозное устройство предназначено для затормаживания крана на заданном пути торможения и удерживания его на месте при воздействии внешних сил, например ветровой нагрузки. Исполнительным органом является опорно-ходовое устройство крана, которое включает приводные и неприводные колеса (на рисунке показан штриховыми линиями).
Механизм передвижения грузовой тележки выполняют по двум схемам: первая — с приводными колесами аналогична механизму передвижения крана (см. рис. 5, а),
вторая — с тяговым канатом (рис. 5, б). В последней схеме все колеса 8 неприводные, а рама тележки соединена тяговым канатом 10 с барабаном 11 тяговой лебедки, при этом канат поддерживается направляющими блоками 9. Тяговая лебедка, кроме барабана, имеет передаточный механизм 4, тормозное устройство 1, двигатель 2 и муфты 3, 12. Исполнительный орган включает тяговый канат 10 с барабаном 11.
К кранам стрелового типа относят различные стреловые самоходные краны (см. рис. 3, в), строительные башенные краны (см. рис. 3, г) и портальные краны (рис. 3, а). Эти краны имеют опорно-ходовую часть 5 различной конструкции, опорно-поворотное устройство 6 и поворотную раму 7, на которой шарнирно закреплена стрела 8, удерживаемая стреловым канатом с полиспастом.
Механизм подъема груза этих кранов смонтирован на поворотной раме. Вращение поворотной части осуществляется механизмом поворота. Подъем и опускание стрелы выполняется механизмом подъема стрелы. Благодаря поступательному и вращательному движениям груза от трех механизмов он может быть доставлен в любую точку площадки, обслуживаемой краном.
Рис.
3.
Грузоподъемные краны:
а
– мостовой, б – козловой, в – автомобильный,
г – башенный, д – портальный. е –
консольный, ж и з – соответственно
мостовой и стеллажный краны-штабелеры
Рис.
4. Кинематическая схема механизма
подъема с полиспастами;
а
— одинарным; б — сдвоенным;
1 -
двигатель;
2 —
упругая муфта;
3
— тормоз; 4
—
передаточный механизм;
5
- зубчатая муфта;
6 -
барабан; 7 — крюковая подвеска; —
полиспаст;
9 —
канат;
10 —
направляющие блоки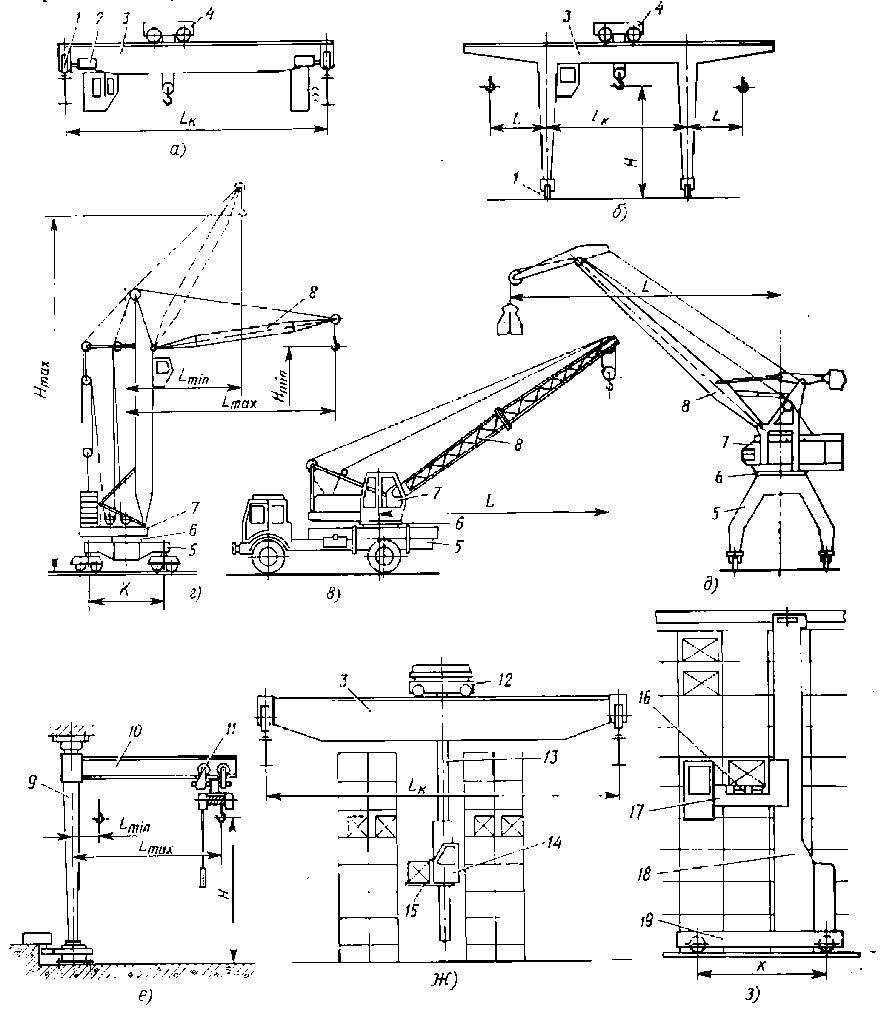
Механизм поворота может быть выполнен с поворотной колонной (рис. 6, а) и опорным кругом (рис. 6, б).
Механизм поворота, показанный на рис. 6, б, состоит из двигателя 1, тормозного устройства 3, передаточного механизма 4 с шестерней, которая входит в зацепление с зубчатым колесом 8 опорно-поворотного устройства 7. Наиболее широко применяют шариковые и роликовые опорно-поворотные устройства, которые являются исполнительным органом механизма поворота (на рисунке показан штриховыми линиями).
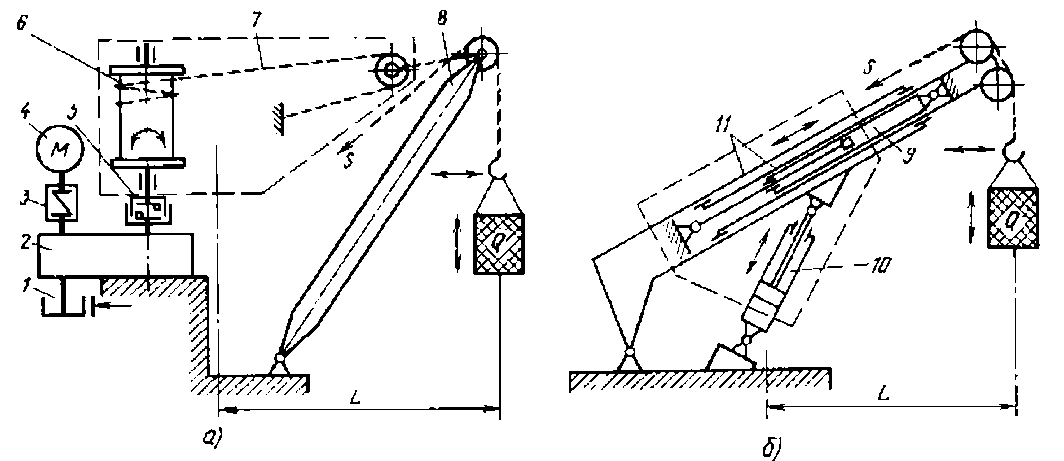
Механизмы изменения вылета выполняют по трем основным вариантам: I) подъем и опускание стрелы 8 с помощью стрелового полиспаста 7, который со стреловой лебедкой по конструктивному исполнению аналогичен механизму подъема груза (рис. 7, а)\ 2) перемещение грузовой тележки по стреле; этот механизм по конструктивному исполнению аналогичен механизму передвижения тележки с тяговым канатом (см. рис. 5, б); 3) взаимное перемещение элементов стрелы, осуществляемое выдвижением телескопических секций стрелы 11 с помощью гидроцилиндров 9 и подъемом и опусканием стрелы с помощью гидроцилиндра 10 (рис. 7, б). Гидроцилиндры являются исполнительными органами механизма.
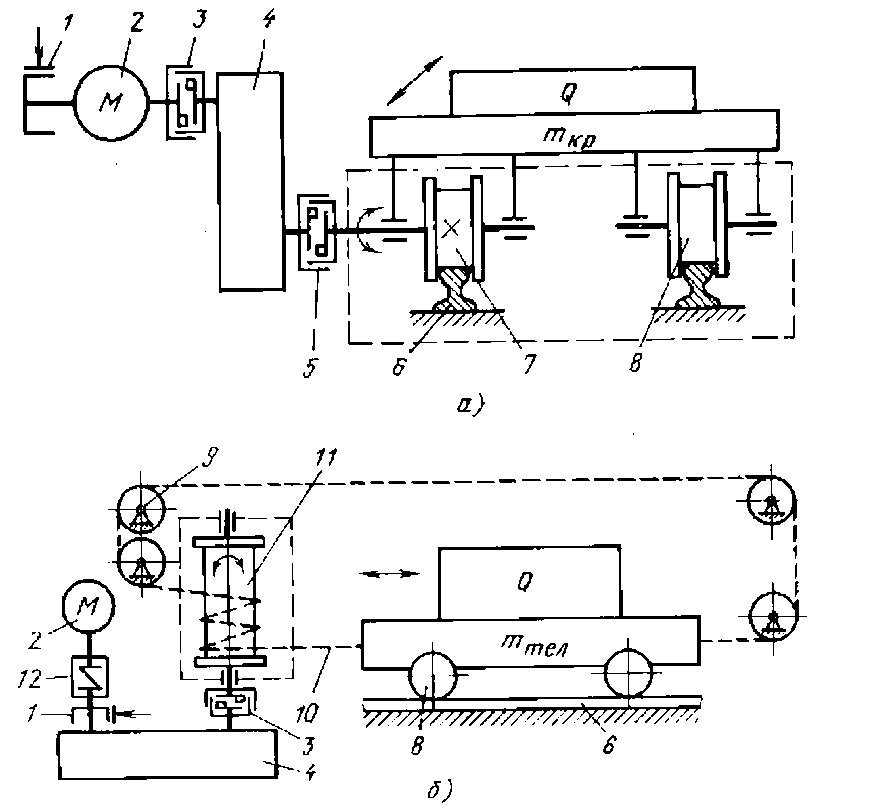
Рис. 5. Кинематическая схема механизма передвижения:
а - с приводными колесами; б - с тяговым канатом; 1 - тормоз; 2 - двигатель: 3. 5 - зубчатые муфты, 6 - рельс; 7, 8 - приводное и неприводное колеса; 9 - направляющий блок; 10 - тяговый канат; 11 - барабан; 12 - упругая муфта
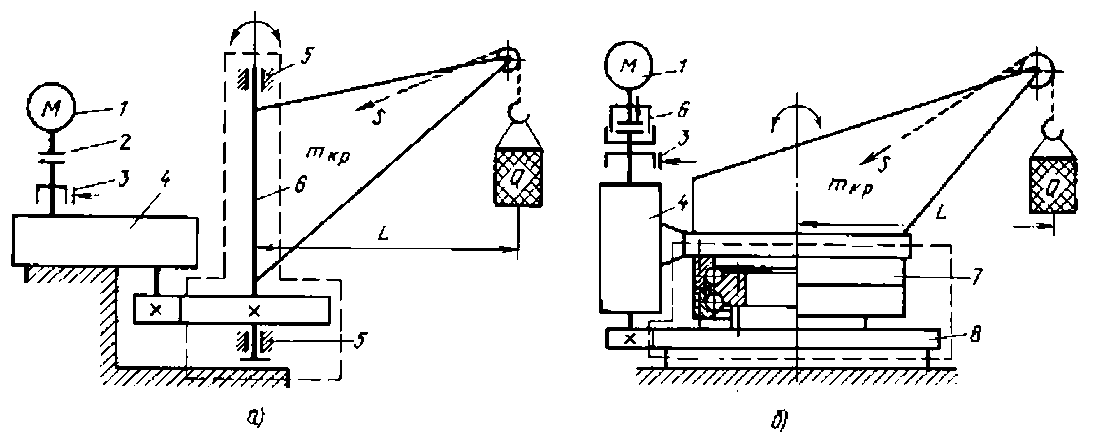
а — с поворотной колонной; б — с опорным кругом; 1 — двигатель, 2 — муфта, 3 — тормоа; 4 — передаточный механизм: 5 — ОПУ с поворотной колонной; 6 — фрикционная муфта; 7 — ОПУ с поворотным кругом; 8 — зубчатое колесо
Консольные краны (рис. 3, е) имеют стальную конструкцию, представляющую собой колонну 9 с консолью 10. Краны могут быть стационарными и передвижными, а консоль — поворотной. По консоли перемещается грузовая тележка 11, в качестве которой часто используют ручные и электрические тали. Опорно-поворотное устройство консоли выполнено в виде колонны 6 (см. рис. 6, а), установленной на радиальных 5 н упорном подшипниках. Зубчатое колесо, закрепленное на колонне, находится в зацеплении с шестерней механизма поворота, включающего двигатель тормозное устройство 3, передаточный механизм 4 и муфту 2.
К раны-штабелеры разделяют на мостовые и стеллажные. Мостовые краны-штабелеры (рис. 3, ж) по конструктивному исполнению близки мостовым кранам. Отличие мостовых кранов-штабелеров состоит в том, что на грузовой тележке 12 закреплена поворотная колонна 13, по которой перемещается грузоподъемник 14 с вильчатым захватом 15 для груза. Этот кран-штабелер имеет механизмы передвижения моста и тележки, подъема грузоподъемника и поворота колонны.
Стеллажные краны-штабелеры (рис. 3, з) выполнены с опорной ходовой балкой 19 с колесами. На балке закреплена колонна 18, по которой перемещается грузоподъемник 16 с телескопическим захватом 17 для груза. Кран имеет механизмы передвижения, подъема грузоподъемника и выдвижения телескопического за хвата.
Управление кранами-штабелерами осуществляется из кабины, закрепленной на кране, с помощью кнопочного поста, подвешенного к грузовой тележке, или дистанционно.
К подъемникам относятся лифты, строительные н скиповые подъемники. Основная нх особенность заключается в том, что они стационарны, а кабина лифта, площадка строительного подъемника и скип перемещаются с помощью канатов механизма подъема в жестких направляющих.
Грузоподъемные машины являются машинами циклического действия, работающими в повторно-кратковременном режиме. Цикл работы машины состоит из перемещения грузозахватного устройства к грузу, подъема н доставки груза в заданное место, освобождения грузозахватного устройства от груза и возвращения его без груза в исходное положение. За один цикл могут работать (находится в действии) любые механизмы. Время работы каждого механизма грузоподъемной машины состоит из периодов разгона tр, установившегося движения ty н торможения tT.
Устройство элементов механизмов и кранов подробно рассмотрено в последующих главах.