

1. Определение.
Базис
{![]() }
пространства
}
пространства
![]() ,
такой, что
,
такой, что
![]()
![]() называется
дуальным (или сопряжённым) к
базису {
называется
дуальным (или сопряжённым) к
базису {![]() }
пространства
.
}
пространства
.
Обозначим за
![]() пространство,
сопряжённое
пространство,
сопряжённое
![]() .
Тогда, как мы уже знаем,
.
Тогда, как мы уже знаем,
![]() .
Мы уже говорили, что два пространства
изоморфны, если они имеют равные
размерности, но в данном случае, кроме
того, можно установить особое соответствие:
канонический изоморфизм.
.
Мы уже говорили, что два пространства
изоморфны, если они имеют равные
размерности, но в данном случае, кроме
того, можно установить особое соответствие:
канонический изоморфизм.
2. Определение.
Отображение
![]() называется каноническим изоморфизмом
и задаётся следующим образом: если
называется каноническим изоморфизмом
и задаётся следующим образом: если
![]() - это вектор из
- это вектор из
![]() ,
то
,
то
![]() .
Это и есть определение
.
Это и есть определение
![]()
Проверим,
что отображение
![]() --- изоморфизм между
и
.
Для начала --- что линейная функция.
--- изоморфизм между
и
.
Для начала --- что линейная функция.
1) Проверим, что
![]() ,
то есть линейная функция из
в
:
,
то есть линейная функция из
в
:![]() ,
то есть
--- действительно линейное отображение
из
в
,
что означает, что это отображение задано
корректно.
,
то есть
--- действительно линейное отображение
из
в
,
что означает, что это отображение задано
корректно.
2) Проверим линейность отображения
![]() (сначала то, что сумма переходит в сумму).
(сначала то, что сумма переходит в сумму).
![]() ,
то есть мы проверили, что
,
то есть мы проверили, что
![]() .
.
![]() ,
то есть
,
то есть
![]() .
Наконец, нужно проверить, биективно ли
отображения
.
Наконец, нужно проверить, биективно ли
отображения
![]() .
.
Инъективность. Пусть
![]() ,
где
--- базис
(то есть мы взяли вектор
из
и разложили его по базису
).
Если
--- дуальный базис
,
то
,
где
--- базис
(то есть мы взяли вектор
из
и разложили его по базису
).
Если
--- дуальный базис
,
то
![]() .
Так как хотя бы один
.
Так как хотя бы один
![]() ,
то и
,
то и
![]() .
То есть
.
То есть
![]() .
Следовательно,
--- инъективное отображение (разные
векторы имеют разные образы), потому
что для линейного множества достаточно
проводить проверку для «0», что мы уже
только что проделали.
.
Следовательно,
--- инъективное отображение (разные
векторы имеют разные образы), потому
что для линейного множества достаточно
проводить проверку для «0», что мы уже
только что проделали.
Сюръективность. Пусть
![]() и обозначим
и обозначим
![]() .
Возьмём
.
Возьмём
![]() .
Тогда
.
Тогда
![]() ,
то есть
,
то есть
![]() .
Значит,
сюръективно, а из этого следует, что
- биекция. Таким образом,
--- изоморфизм.
.
Значит,
сюръективно, а из этого следует, что
- биекция. Таким образом,
--- изоморфизм.
Теорема.
Векторы
![]() линейно независимы тогда и только тогда,
когда
линейно независимы тогда и только тогда,
когда
![]() ,
такие что:
,
такие что:
 .
.
![]()
1) Пусть
![]() линейно зависимы, то есть существуют
коэффициенты
линейно зависимы, то есть существуют
коэффициенты
![]() (хотя бы один отличен от 0), такие что
(хотя бы один отличен от 0), такие что
![]() .
Пусть
.
Пусть
![]() --- столбцы матрицы (*). Тогда для любых
--- столбцы матрицы (*). Тогда для любых
![]() линейная комбинация столбцов
линейная комбинация столбцов
![]() .
.
2) Теперь пусть
--- линейно независимы. Дополним до базиса
:
![]() и возьмём дуальный базис
и возьмём дуальный базис
![]() .
Тогда
.
Тогда ,
что и требовалось доказать.
,
что и требовалось доказать.
Пусть
![]() и
и
![]() --- множество векторов
из
,
таких, что
--- множество векторов
из
,
таких, что
![]()
обращаются в![]() .
То есть,
.
То есть,
![]()
является решением системы линейных
уравнений
Теорема. 1) Пусть
![]() .
Тогда
.
Тогда
![]() ,
где
,
где
![]() .
.
2) Любое подпространство
![]() является пространством решений
некоторой системы
является пространством решений
некоторой системы
![]()
![]() .
.
1) Пусть сначала
--- линейно независимы. Тогда дополним
до базиса
в
и возьмём дуальный базис
в
![]() ,
тогда эти базисы связаны со следующим
соотношением:
,
тогда эти базисы связаны со следующим
соотношением:
![]() .
Пусть
.
Тогда
.
Пусть
.
Тогда
![]() ,
то есть
,
то есть
![]() в этом случае
в этом случае
![]() ,
причём
,
причём
![]() .
Если же
линейно зависимы, то существует
максимальная линейно независимая
подсистема, например,
.
Если же
линейно зависимы, то существует
максимальная линейно независимая
подсистема, например,
![]() ,
такая что
,
такая что
![]() .
Но тогда если
.
Но тогда если
![]() ,
то
,
то
![]() .
То есть
.
То есть
![]() (см. выше) отсюда мы уже доказали, что
(см. выше) отсюда мы уже доказали, что
![]() ,
следовательно, 1) доказано.
,
следовательно, 1) доказано.
2) Пусть
--- любое подпространство. Выберем базис
в
так, что
![]() .
Если
.
Если
![]() --- дуальный базис
,
то
--- дуальный базис
,
то
![]()
Следствие 1. Множество решений
однородной системы линейных уравнений
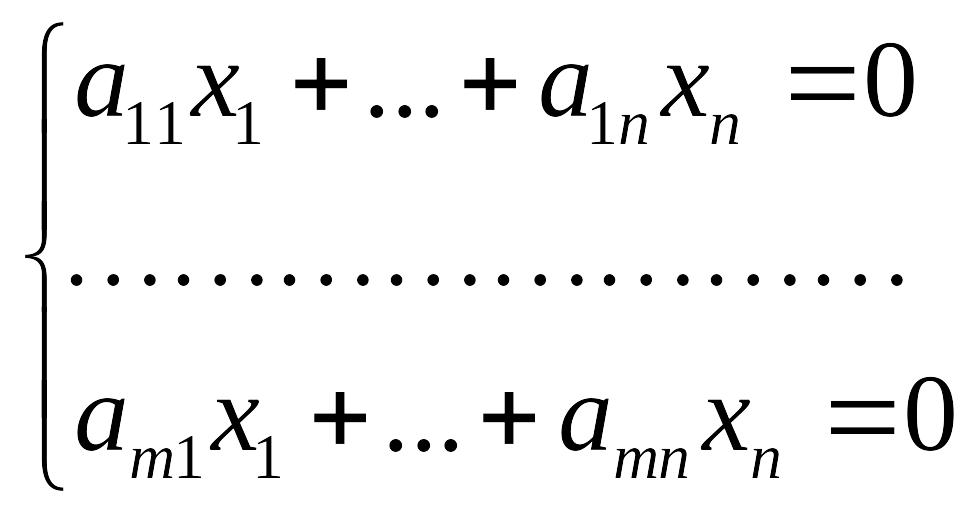 является подпространством в
арифметическом пространстве
является подпространством в
арифметическом пространстве ![]() .
.
Следствие 2. Любое подпространствo в является пространством решений некоторой однородной системы линейных уравнений.
Пусть ![]() – подпространство. По предыдущей теореме
существуют
– подпространство. По предыдущей теореме
существуют
![]() ,
,
такие, что: ![]() .
.
Если --- базис , --- базис (дуальный), то
![]() .
Если
.
Если
![]() ,
то
,
то
![]()