

Электромашинный асинхронный преобразователь частоты
В схемах электромашинного преобразователя частоты могут быть использованы в качестве основного преобразователя обычные асинхронные машины с фазным ротором в режиме асинхронного преобразователя частоты. Одна из таких схем с асинхронным преобразователем частоты АПЧ приведена на рисунке 3. Здесь статор АПЧ присоединен к сети переменного тока через автотрансформатор АТ, позволяющий независимо регулировать на входе (и выходе) АПЧ амплитуду напряжения. Ротор АПЧ механически связан с якорем двигателя М2, угловая скорость которого регулируется по системе Г—Д так же, как и в предыдущей схеме с синхронным генератором. Вторичная (роторная) цепь АПЧ служит источником напряжений регулируемой частоты и амплитуды.
Частота на выходе АПЧ равна
f2=f1±fМ2,
где fМ2= ωр/2π; ω — скорость двигателя М2; f1 — частота напряжения питания статора, принятая равной частоте питающей сети.

Рисунок 3 – Схема с асинхронным преобразователем частоты
Знак плюс относится к случаю, когда ротор вращается против поля статора, а знак минус—согласно с полем статора. Следовательно, при вращении ротора против поля частота f2 > f1 согласно с полем f2 < f1. При неподвижном состоянии ротора АПЧ частота f2 = f1.
Энергия, передаваемая АПЧ нагрузке, при вращения против поля складывается из механической энергии, поступающей с вала двигателя М2, и электрической энергии, потребляемой АПЧ со стороны автотрансформатора АТ. При вращении по полю электрическая энергия, поступающая в статор АПЧ, частично передается нагрузке, а часть — двигателю М2, в этом случае работающему в генераторном режиме. Эта часть энергии после преобразований возвращается о сеть с помощью машины М1.
Если, например, принять частоту на выходе АПЧ f2 = 100 Гц, а частоту питания f1 = 50 Гц, то активная мощность Р2 составит только 50 % установленной мощности нагрузки, а через двигатель М2 будет подводиться также 50 % Р∑. Таким образом, при указанном соотношении частот установленная мощность машин системы Г—Д окажется вдвое меньше, чем в случае электромашинного преобразователя с синхронным генератором. Раздельное регулирование напряжения с помощью автотрансформатора АТ дает возможность (ограничиваемую насыщением стали АПЧ) устанавливать требуемое соотношение между U2 и f2.
С возрастанием выходной частоты АПЧ установленная мощность преобразовательного устройства увеличивается.
Электромашинные преобразователи частоты с АПЧ применяются обычно для получения частот, превышающих частоту питающей сети, когда необходимо регулировать угловую скорость большого числа согласованно работающих асинхронных двигателей с короткозамкнутым ротором.
Вентильно-электромашинный преобразователь частоты
Схема вентильно-электромашинного преобразователя частоты с синхронным генератором (вместо него может быть использован и АПЧ) приведена на рисунке 4. Здесь вращающийся преобразовательный агрегат постоянной скорости заменен статическим управляемым преобразователем (выпрямителем) УП, собранным, например, на тиристорах. От управляемого выпрямителя питается двигатель М1 агрегата переменной скорости. В данном случае несколько повышается КПД преобразователя частоты ПЧ, сокращаются его габариты.
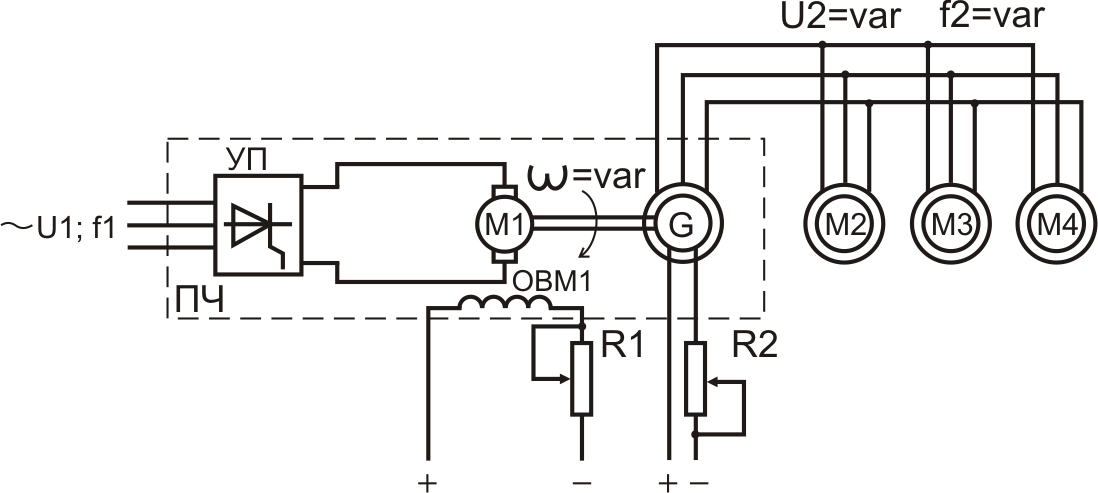
Рисунок 4 – Схема вентильно-электромашинного преобразователя частоты с синхронным генератором
Однако остаются такие недостатки, как невысокая надежность, необходимость в использовании, кроме УП двух машин (двигателя М1 и генератора G), значительная инерционность привода, связанная с изменением угловой скорости агрегата переменной скорости при изменении выходной частоты.
ЛЕКЦИЯ 14
Статические преобразователи частоты
Вопросы