

2. Приборы автоматики и функциональные элементы автоматических устройств управление производственными процессами
2.1 Первичные измерительные приборы (элктрические датчики)
Классификация датчиков и требования к ним. Одним из главных элементов любой системы автоматики и телемеханики являются электрические датчики. Назначение датчика - преобразование контролируемой величины в величину другого рода, удобную для дальнейшего использования. В большинстве случаев датчики преобразуют неэлектрическую величину в электрическую. Основной характеристикой датчика является зависимость выходной величины Y от входной X
у = f ( х )
К электрическим датчикам предъявляются следующие требования : надежность в работе, непрерывная линейная зависимость выходной величины к входной, высокая динамическая чувствительность, малая инерционность, отсутствие влияния датчика на измеряемый параметр, минимальная масса и габариты.
Классифицируются датчики по двум признакам - характеру электрических величин, получаемых на выходе, и виду контролируемой неэлектрической величины (табл. 1)
По характеру электрических величин ,получаемых на выходе, электрические датчики делятся на параметрические и генераторные. К параметрическим датчикам относятся такие элементы, у которых изменение контролируемой величины вызывает изменение параметра электрической цепи (активного сопротивления, индуктивности или емкости). Генераторные – датчики, которые сами являются источниками электрической энергии, причем возникающая на выходе энергия пропорциональна контролируемой величине.
В зависимости от вида контролируемой величины различают датчики тепловые, состава, перемещения и т. д.
Часто применяются электрические датчики с промежуточным преобразованием. Преобразование контролируемой величины в таких датчиках происходит по схеме измеряемая величина - механическое воздействие - электрическая величина. Например, давление преобразуется в перемещение стрелки, которое затем преобразуется в изменение активного сопротивления.
Параметрические датчики активного сопротивления
Реостатные и потенциометрические датчики служат для преобразования углового перемещения в электрический сигнал. Эти датчики выполнены в виде переменного сопротивления, подвижный контакт которого механически связан с преобразуемым элементом.
Обычно они представляют собой проволочный реостат, ползунок которого перемещается под воздействием контролируемого или регулируемого параметра (рисунок 1)
Выходное напряжение датчика в режиме холостого хода определяется по формуле:
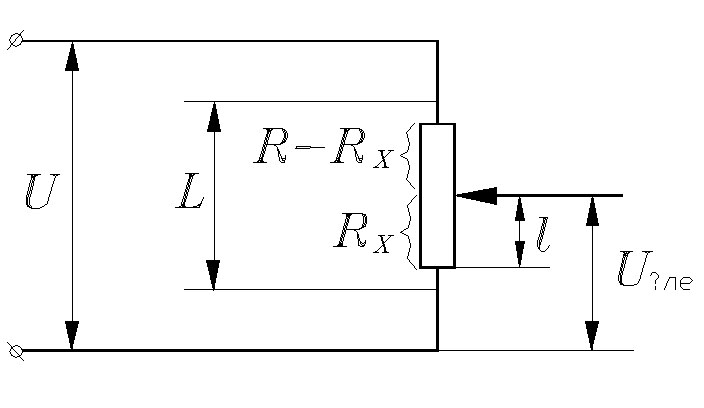

где: I - ток, который
протекает по датчику;
RX - сопротивление введенной части датчика;
U - напряжение питания
датчика
R - полное сопротивление датчика
Рисунок 1
При равномерной намотке датчика сопротивление проволоки на единицу длины постоянно и определяется из равенства:

где : l - перемещение ползунка датчика;
L - длина обмотки датчика.
Тогда
значение

где K = U / L - коэффициент передачи.
Свойства потенциометрического датчика определяются его характеристикой U вых = f ( x) .Тщательные измерения показывают, что выходное на-пряжение проволочных датчиков изменяется неплавно, а ступенчато, так как непрерывному изменению параметра соответствует ступенчатое изменение сопротивления, равное значению сопротивления одного витка (токосъемный элемент движка не соприкасается с поверхностью провода по всей длине, а контактирует только с определенной частью отдельных витков обмотки) .
Рассмотрим характеристику потенциометрического датчика (Рисунок 2). Реальное изменение выходного напряжения показано ломаной линией О а б в г д е ...O. Анализ этих характеристик показывает, что ступенчатость зависит от числа витков на всей длине L рабочей части потенциометра и, что до полного включения первого витка обмотки выходное напряжение фактически равно нулю и определяется по оси L отрезком О а .
После включения этого витка выходное напряжение изменяется скачком и достигает значения аб(U1) . Соответствующее скачкообразное приращение напряжения происходит каждый раз, когда движок переходит с первого витка на другой и т.д
Р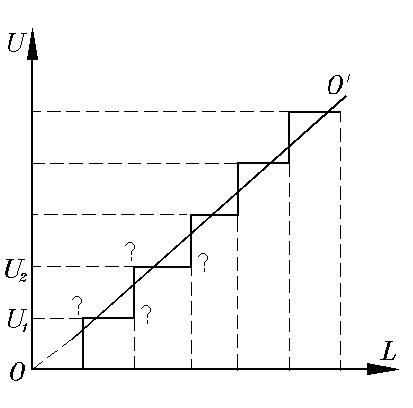 асчетная
характеристика потенциометрического
датчика представлена прямой ОО’.
асчетная
характеристика потенциометрического
датчика представлена прямой ОО’.
Таким образом существует отклонение реальной характеристики от расчетной.Для уменьшения численного значения погрешности стремятся к
увеличению числа витков датчика на единицу контролируемого параметра, что приводит к уменьшению ступенчатости харак- теристики и уменьшению погрешности измерения.
Рисунок 2
Рассмотренный датчик является однотактным (нереверсивным) так как имеет возможность измерять перемещение ползунка “ X” только одного знака.
Датчик, реагирующий на знак (направление) перемещение пол- зунка называется двухтактным или реверсивным (рисунок 3, рисунок 4). Для построения указанных датчиков необходимо сделать отвод от средней точки обмотки датчика.
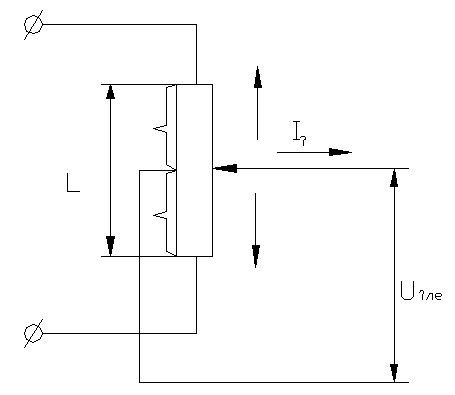
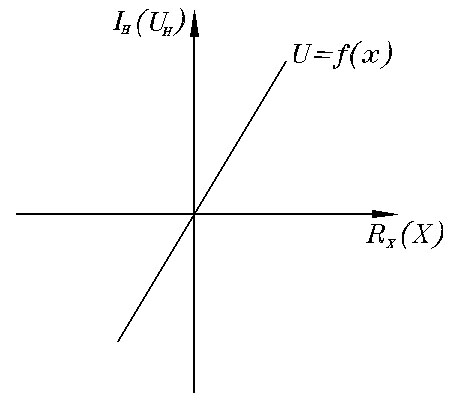
Рисунок 3 Рисунок 4
Недостатки реостатных датчиков - наличие подвижного контакта, снижающего надежность работы и срок службы датчика, относительно большое перемещение движка и большое усилие для его перемещения, наличие ошибки от ступенчатости характеристики.
Достоинства - конструктивная простота, возможность питания переменным током, простота регулировки, отсутствие необходимости последующего усиления, если они применяются для целей измерения.
Потенциометрические датчики применяют в основном для измерения линейных и угловых перемещений. Например, с помощью таких датчиков можно установить контроль за положением задвижек, клапанов. Их можно использовать для контроля уровня, расхода, толщины изделий.
Т е н з о д а т ч и к и
Тензодатчиком (тензорезистором) называется датчик, предназначенный для измерения статических или динамических деформаций в деталях и преобразующий эти деформации в изменение активного сопротивления.
В настоящее время широко применяются проволочные, фольговые и полупроводниковые тензодатчики.
Проволочные тензодатчики конструктивно представляют собой отрезок тонкой проволоки I ( диаметром 0,02-0,5 мм), которая зигзаго
о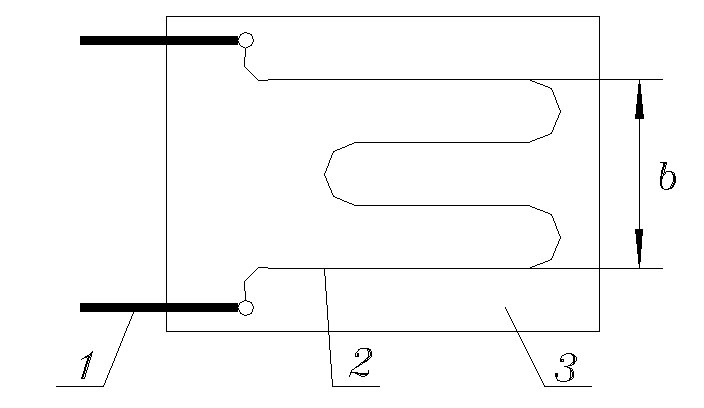 бразнонаклеивается
на тонкую бумажную или пленочную основу
2 .
бразнонаклеивается
на тонкую бумажную или пленочную основу
2 .
Сверху проволока также закрыта тонкой бумагой или пленкой. Для включения тензодатчика в схе- му к концам проволоки припаивают два медных проводника 3 . Тензодатчик жестко закрепляется с помощью клея на испытуемую деталь 4 .
Рисунок 5
Принцип работы проволочного тензодатчика основан на изменении активного сопротивления проволоки под действием механических усилий. Под действием деформации детали изменяют геометрические размеры проволоки. Если до растяжения электрическое сопротивление было R = L / S , то при растяжении оно станет R+R .
Отношение величины относительного изменения сопротивления к относительному изменению линейного размера проволоки характеризует тензочувствителтность датчика S т.
![]()
где L - абсолютное изменение длины проволоки;
L / L - относительное изменение длины проволоки;
R /R - относительное изменение сопротивления тензодатчика.
Значение коэффициента тензочувствительности проволочного тензодатчика 1,8 - 2,5 зависит от технологии изготовления датчика и материала проволоки ( константан, нихром, манганин, никель, хромель, висмут ). Эти материалы имеют большое удельное сопротивление и небольшой температурный коэффициент сопротивления, т. е. сопротивление материала мало зависит от температуры.
Достоинства - небольшие габариты, малый вес, безинерционность, что дает возможность измерять быстропеременные нагрузки, отсутствие гистерезиса (различие в сопротивлениях для одних и тех же величин усилий при сжатии и последующем снятии сжимающего усилия).
Недостатки :
1) малая величина относительного сопротивления R/R< 1% , что вызывает необходимость иметь измерительные схемы высокой чувствительнос- ти. Для увеличения чувствительности применяют мостовые схемы с двумя или четырьмя одинаковыми датчиками, при этом датчики включенные в смежные плечи работают один на сжатие, другой на растяжение.
2) температурная погрешность. При исследуемых в деталях деформациях сопротивление тензодатчика изменяется незначительно, поэтому температурные изменения сопротивления датчика могут внести погрешность даже в случае применения материалов с низким температурным коэффициентом.
Для компенсации температурной погрешности применяют мостовые схемы с двумя датчиками в смежных плечах моста (рисунок 6)
Один из датчиков, например рабочий 1, наклеивается в направлении действия усилия, а другой , компенсационный 1’ , наклеивается так, чтобы расположение проволоки было перпендикулярно усилию. Датчик 1’, находясь в одинаковых с рабочим датчиком тепловых условиях, не должен реагировать на деформацию. Тогда температурные изменения сопротивления уравновешиваются и баланс схемы не нарушается. Для увеличения чувствительности прибор включается через усилитель 2 .
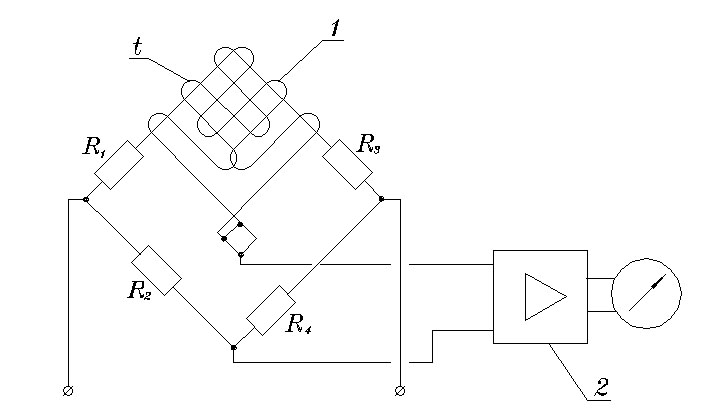
Рисунок 6
К основным характеристикам тензодатчиков относятся :
1) тензочувствительность - S д ;
2) база L - длина петель решетки;
3) ширина решетки В ;
4) активное сопротивление датчика.
В соответствии с техническими условиями на проволочные тензодатчики предусматривается выпуск тензадатчиков с базами 3,5 , 10 , 20 , 30 , 50 и 100 мм и сопротивлениями 80 , 100, 200 и 400 Ом.
5) ползучесть - постепенное уменьшение воспринимаемой тензодатчиком деформации при постоянном значении деформации детали.
фольговые тензодатчики - в них вместо решетки из проволоки применяется решетка из тонкой полоски металлической фольги. Толщина фольговой ленты - 4-12 мм. Конструкции решеток фольговых тензодатчиков имеют различные конфигурации (рисунок 7(а, б,в)). Чаще применяются конфигурации: прямая - для измерения линейных деформаций, мембранная (круглая) - предназначенная для измерения давления,фигурная (резеточная ) - для измерения крутящих моментов.
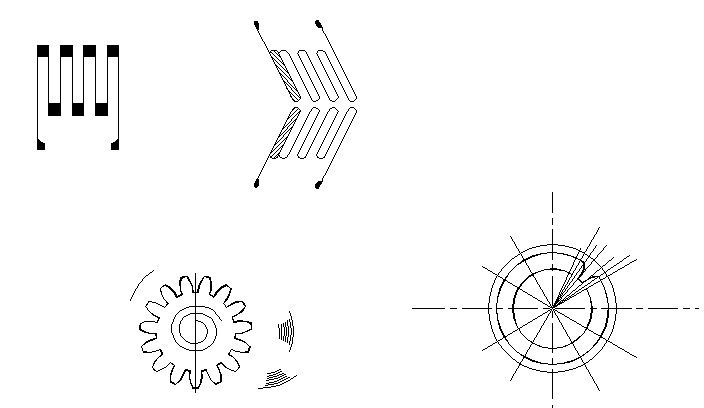
Рисунок 7
По сравнению с проволочными датчиками они имеют следующие достоинства :
1) большую площадь соприкосновения с деталью, что приводит к увеличению теплоотдачи, а следовательно и увеличению тока (0,2А), протекающего через датчик;
2) значительно лучшую восприимчивость деформации из-за большего значения отношения периметра сечения плоской полосы к площади ее сечения, благодаря чему точность измерения увеличивается.
Сопротивление фольговых тензодатчиков равно 50-200 Ом, температурный диапазон работы - 40 + 70 С . Датчики, изготовленные из фольги титанового сплава могут работать в агрессивных средах при температуре до 200 С .
Полупроводниковые тензодачики применяются в тех же случаях, что и проволочные и фольговые. Основным отличием полупроводникового тензодатчика является большое (до 50 %) изменение сопротивления датчика при деформации и высокая чувствительность к температуре (в 10-20 раз больше, чем у проволочных датчиков). Для изготовления полупроводниковых тензодатчиков применяют германий, кремний, арсенид галия и др. полупроводники.
Конструктивно полупроводниковый тензодатчик представляет собой пластину из германия или кремния, которая наклеена на бумагу. Пластина снабжена металлическими выводами, с помощью которых датчик подключается в схему. Номинальное сопротивление датчика равно 40-100 Ом. Температурный диапазон работоспособности датчика составляет от 160 до 300 С.
Преимущества датчика - высокий коэффициент тензочувствительности в 60 раз выше, чем у проволочных, малые размеры ( длина решетки от 3 до 10 мм ), большое значение выходного сигнала.
Основные недостатки - малая гибкость, небольшая механическая прочность, неустойчивые характеристики и значительный гистерезис (изменение сопротивления) Гистерезис достигает 2-3% . Разброс параметров в одной партии доходит до 20 % . К недостаткам датчиков можно отнести и нелинейность их характеристики ( линейность изменения сопротивления сохраняется при относительных деформациях до 0,1% ).
Т е р м о р е з и с т о р ы
Терморезистором называется устройство, содержащее проводник или полупроводник, электрическое сопротивление которого сильно меняется с изменением температуры окружающей среды. В технике широко применяются терморезисторы с теплочувствительным элементом в виде проводника меди и платины. Выбор меди и платины обусловлен большой их механической и химической стойкостью при высоких температурах.
Металлические терморезисторы (термометры сопротивления) обеспечивают измерения температуры для медных от - 50 до 150 С, платиновых от - 200 до 660 С.
Зависимость сопротивления от температуры в указанных диапазонах для медных и платиновых термометров :
![]()
![]()
где : Rt - сопротивление термометра при температуре t , Ом ;
R0 - начальное сопротивление термометра при температуре t0, Ом
- температурный коэффициент сопротивления, 1 С ;
t - температура в момент измерения , С ;
t0- начальная температура термометра , С ;
k - коэффициент k = - 5,810-7
Металлические терморезисторы выполняются из тонкой проволоки 1 диаметром около 0,1 мм, намотанной на слюдяной, фарфоровой или кварцевый каркас, который укладывается в защитный кожух 2 (рисунок 8). Обычно сопротивление терморезисторов при 0С составляет порядка 100 Ом. Медные терморезисторы имеют условное обозначение ТСМ,
п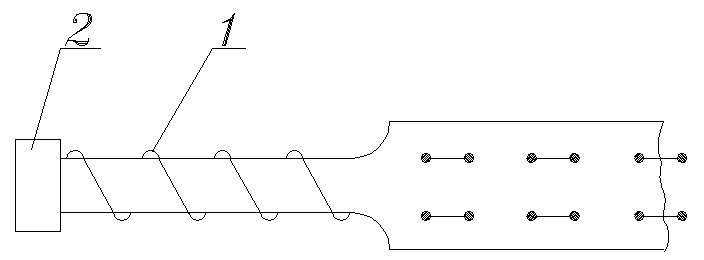 латиновые
- ТСП.
латиновые
- ТСП.
Рисунок 8
Недостатки - большие габариты и значительная инерционность.
Полупроводниковые терморезисторы (термисторы) - изготавливают из полупроводникового материала. Широко применяются термисторы ММТ (медно-марганцевые) и КМТ (кобальта - марганцевые). Термисторы имеют большой отрицательный коэффициент сопротивления, т. е. при увеличении температуры их сопротивление уменьшается.
Сопротивление термистора при температуре Т можно определить по формуле :
![]()
где : R0 - начальное сопротивление термистора при температуре
Т0, Ом ;
е - основание натурального логарифма ;
В - постоянная материала, К ;
Т - температура в момент измерения , К;
Т0 - начальная температура термистора, К .
Термистор конструктивно представляет собой диск, трубку из полу проводникового материала с металлическими выводами 2. (рисунок 9)
 Чтобы
защитить термистор от
Чтобы
защитить термистор от
действия влаги, его покрывают
слоем лака.
Рисунок 9
Следует отметить, что сопротивление термистора уменьшается с ростом его температуры по закону экспоненты (Рисунок 10).
Термисторы имеют ряд преимуществ перед металлическими термометрами сопротивления : высокое удельное электрическое сопротивление, благодаря чему термистор можно сделать очень маленьким, высокая чувствительность.
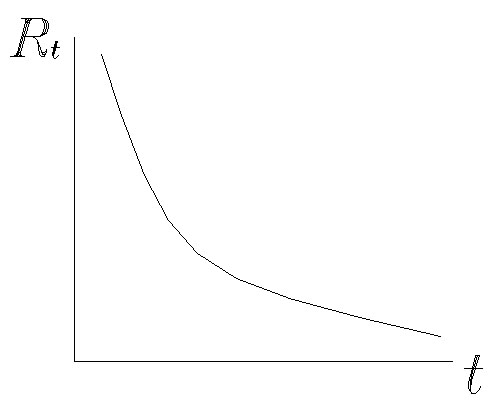
Рис.10
Недостатки термисторов - нелинейность и нестабильность характеристики, разброс характеристик.
Основные параметры терморезисторов :
1) номинальное сопротивление, определяемое как сопротивление рабочего тела терморезистора при температуре окружающей среды 20 С ;
2) температурный коэффициент сопротивления (ТКС) , характеризующий чувствительность терморезисторов к изменению температуры. ТКС, значение которого обычно приводится для температуры 20 С , выражает изменение величины сопротивления терморезистора при изменении температуры на 1С , % .
3) максимальная рабочая температура, обеспечивающая в течении срока службы стабильность характеристик терморезистора ;
4) постоянная времени, характеризующая тепловую инерцию терморезистора, определяется временем, в течении которого температура терморезистора становится равной 63 С при перенесении его из воздушной среды, с температурой 0 С , в среду, с температурой 100 С .
Терморезисторы применяются для измерения и регулирования температуры, термокомпенсации различных элементов электрической цепи и т.д. Измерение температуры терморезисторами проводится в основном с помо- щью неравновесных и равновесных мостов.