

Промышленные регуляторы
Содержание
Автоматические регуляторы ………………………………………………………….
Классификация регулирующих устройств …………………………………………...
Электрические регулирующие устройства …………………………………………...
Регулирующее устройство агрегатного типа ………………………………………...
Ступенчатый импульсный прерыватель ……………………………………………...
Реостатное задающее устройство ……………………………………………………..
Дискретные (релейные) регуляторы …………………………………………………..
Регулирующие устройства прямого действия. ………………………………………..
Регулятор температуры прямого действия …………………………………………...
Регулятор давления ……………………………………………………………………..
Регулятор расхода ………………………………………………………………………
Литература ………………………………………………………………………………
Автоматические регуляторы Классификация регулирующих устройств.
Регулирующие устройства предназначены для практической реализации процесса регулирование и являются основным структурным элементом автоматического регулятора.
Регуляторы, в которых сигнал чувствительного элемента усиливается за счет внешнего источника энергии, относятся к приборам непрямого действия.
По виду энергии, используемой для образования управляющего воздействия, все регулирующие устройства разделяются на электрические и пневматические.
По форме представления входных и выходных сигналов они делятся на дискретные (релейные, импульсные) и непрерывные.
По конструктивному признаку различают устройства приборного типа, в которых все элементы смонтированы во вторичном автоматическом приборе, и регулирующие устройства агрегатного типа, у которых все элементы выполнены в виде самостоятельных конструктивно оформленных блоков.
Отдельную группу составляют регулирующие устройства прямого действия, в которых все элементы (первичный преобразователь, регулирующий элемент и исполнительный механизм) представляют собой единую конструкцию и для перемещения регулирующего органа используют энергию чувствительного элемента.
Электрические регулирующие устройства
В автоматических вторичных приборах типа КСМ, КСП, КСД и др. в зависимости от их модификации встроены двух и трех позиционные регулирующие устройства.
На рисунке 1 показана электрическая схема позиционного регулирующего устройства вторичного прибора, которая содержит задающий механизм и контактный задатчик, встроенные непосредственно в измерительный блок прибора, блок-реле, смонтированный на отдельной плате, размещенной также в корпусе прибора.
Принципиальная схема блока-реле включает контактный задатчик I, клеммную колодку II, блок-реле III. Блок-реле содержит два электромагнитных реле КVI и КV2, которые питаются выпрямленным током, через диод VD1 и конденсатор С. Конденсатор предназначен для сглаживания пульсаций и повышения напряжения, диоды VD2 и VD3 искрогасящие.
Рисунок 1. Электрическая схема позиционного регулирующего устройства
Резистор R уменьшает коэффициент возврата реле, увеличивая тем самым устойчивость работы системы. Блок-реле питается от напряжения переменного тока 33 В.
Подвижный контакт В контактного задатчика кинематически связан с пером прибора. Каждому значению измеряемого параметра соответствует определенное положение подвижного контакта В. Два неподвижных контакта А и С позволяют регулировать зону нечувствительности путем изменения расстояния между ними. При соответствии величины измеряемого параметра заданию подвижный контакт В находится в среднем положении между контактами А и С и не касается их. Отклонение контролируемого параметра от заданного значения вызывает перемещение контакта В в ту или другую сторону до замыкания с контактом А или С, включая цепь питания соответствующего электромагнитное реле (КVI или КV2).
При двухпозиционном регулировании в контактном задатчике используется только один неподвижный контакт А. При соприкосновении подвижного контакта В с контактом А срабатывает реле КV2, замыкая при этом цепь клемм О-А. При размыкании контактов В и А контактного задатчика реле КV2 обесточивается, размыкая при этом цепь клемм О-А и замыкая клеммы О-С. Контакт C контактного задатчика в данной схеме исполняет роль механического упора и в схему не включен.
При трехпозиционном регулировании в контактном задатчике используется два неподвижных контакта А и С.
В момент отрыва подвижного контакта В от контакта А реле КV2 обесточивается, при этом размыкаются КV2. I и цепь О-A, но замыкается цепь О-С. Это положение сохраняется вплоть до соприкосновения подвижного контакта В с контактом C, т.е. на протяжении всего времени нахождения параметров в пределах установленной зоны. При замыкании подвижного контакта В с контактом C срабатывает реле КVI и его контакты КVI. I, при этом размыкается рабочая цепь О-С и замыкается цепь О-В. При отходе подвижного контакта В от контакта С якорь реле отпадает, размыкая цепь О-В, и снова замыкается цепь О-С.
Регулирующее устройство агрегатного типа содержит балансное реле БР3, которое представляет собой двухкаскадный релейный усилитель. Балансное реле включается в структуру регулятора в соответствии с функциональной схемой, приведенной на рисунке 2. В данной схеме применяется типовой вторичный преобразователь ТВП(тип КС, МСР, ПСР, ДРС соответствующих модификаций), имеющий реостатное задающее устройство и исполнительный механизм (тип ПРм).
Рисунок 2. Функциональная схема включения балансного реле.
В приборах типа КС реостатное задающее устройство имеет только один постоянный диапазон регулирования, равный 10% значению шкалы; в приборах типа МСР, ПСР и ДСР реостатное задающее устройство сменное и может образовывать диапазон регулирования, равный 10 или 20% значения шкалы прибора.
Принципиальная электрическая схема состоит из первичного трехпозиционного поляризованного реле КVI (РП-5), вторичных электромагнитных реле КV2 и КV3 с двумя парами замыкающих контактов, понижающего трансформатора TV и двухполупериодного выпрямителя VD – рисунок 3.
Реостатный задатчик Rз находится в типовом вторичном преобразователе и соединен с реостатом обратной связи исполнительного механизма через балансное реле в соответствии с принципиальной схемой.
При отклонении регулируемого параметра от заданного значения движок реостата задатчика Rз сместится из среднего положения, в результате нарушится электрическое равновесие регулирующей системы моста и по обмотке первичного реле потечет ток разбаланса определенного направления.
Рисунок 3. Принципиальная схема регулятора с балансным реле БР-3
При положительном возмущающем воздействии контакты первичного реле KVI замкнут цепь питания одной из обмоток более мощного вторичного реле KV2, а соответствующие контакты вторичного реле при этом приведут в действие электродвигатель исполнительного механизма, который переместит сочлененный с ним регулирующий орган и движок реостата обратной связи. Действие исполнительного механизма будет продолжаться до тех пор, пока вновь не установится электрическое равновесие системы реостатов регулирующего прибора и исполнительного механизма.
Таким образом, при положительном максимальном возмущающем воздействии на САР отклонение регулируемого параметра от его номинального значения будет также максимальным. Соответственно это отклонение вызовет полное закрытие регулирующего органа. Наоборот, при отрицательном максимальном возмущающем воздействии, отклонение регулируемого параметра будет в сторону уменьшения, а регулирующий орган полностью откроется. При остальных значениях возмущающего воздействия и соответствующих отклонениях регулируемого параметра регулирующий орган будет перемещаться пропорционально этим отклонениям.
Поскольку первичные преобразователи обладают определенной инерционностью, а исполнительные механизмы - определенной длительностью срабатывания, в системе “первичный преобразователь – исполнительный механизм” могут возникнуть незатухающие колебания, т.е. автоматическая система регулирования становится неустойчивой.
Для устранения этих колебаний используют в структуре регулятора прерыватели.
Ступенчатый импульсный прерыватель СИП, ограничивает время действия импульса от первичного преобразователя к исполнительному механизму и создает требуемые паузы между импульсами (например, длительность импульса 1-2 с, пауза 2-3 мин.). За несколько импульсов исполнительный механизм переместит регулирующий орган в положение, которое обеспечивает заданное значение регулируемого параметра.
На рисунке 4 показана кинематическая схема прерывателя ступенчатого импульсного типа. Действие устройства основано на периодическом замыкании герметических ртутных переключателей, при изменении их наклона на определенный угол с помощью механической передачи вращения вала синхронного двигателя на вал держателя ртутных переключателей. Настроенные по заданию сдвоенный кулачок 7 и мальтийский крест 1 с установочным диском 2 являются носителями периодической программы устройства. По вращающемуся кулачку, закрепленному на валу синхронного двигателя 8, обкатывается ролик 6, закрепленный на коромысле 4. Коромысло жестко соединено с держателем ртутных переключателей 5. Пальцы сдвоенного кулачка, западая в пазы мальтийского креста с укрепленным на нем установочным диском, периодически поворачивают его. Повторяя профиль сдвоенного кулачка, ролик через коромысло передает движение держателю ртутных переключателей. В результате переключатели периодически меняют свое положение и при перемещении в одно из крайних положений обеспечивают замыкание или размыкание электрических цепей.
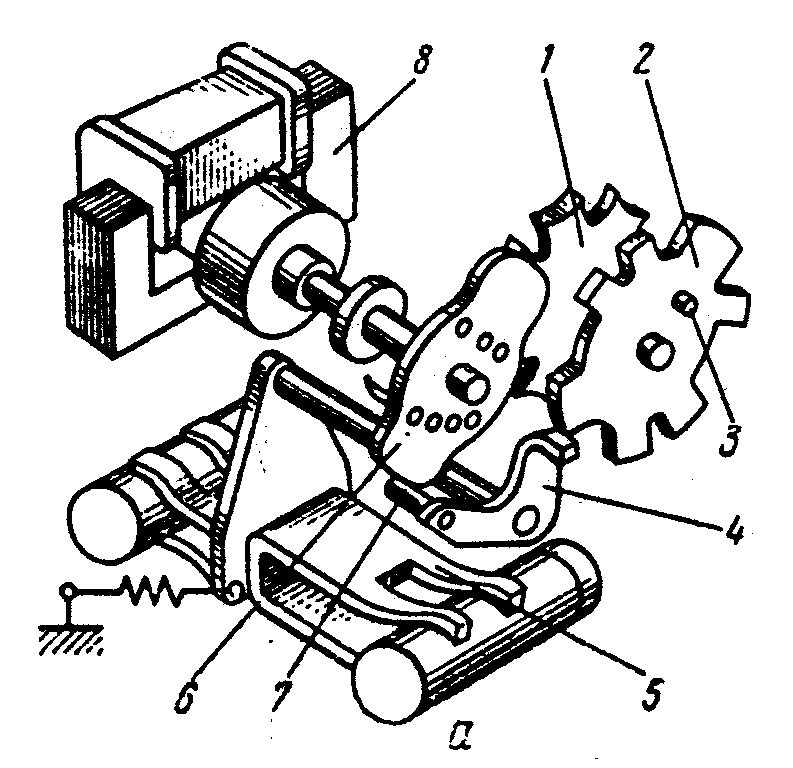
Рисунок 4. Прерыватель импульсный ступенчатый СИП-01 М
а – кинематическая схема;
б – принципиальная электрическая схема.
Установка периода подачи импульсов (промежуток времени между началом одного и началом последующего импульса) производится поворотом и установкой нужным отверстием установочного диска 2 на штифт 3.
Значения длительности периодов в секундах указаны на диске. Установка длительности импульсов производится за счет определенного взаимного расположения сдвоенных кулачков. Для этого верхний кулачок устанавливается нужным отверстием на штифт нижнего кулачка. Значения коротких импульсов в секундах указаны на верхнем кулачке. На рисунке 4 приведена принципиальная электрическая схема СИП-01 М. Ключ К1 служит для подключения синхронного двигателя СД к сети питания, ключ К2 служит для подключения одного из ртутных переключателей в цепь управления исполнительным механизмом регулятора: в положении “Импульсы короткие” подключается переключатель KS1, в положении “Импульсы длинные” – переключатель KS2.
Реостатное задающее устройство представляет собой реостат, ползунок которого через рычажный механизм связан с пером измерительного прибора ИП (рисунок 5). При соответствии значения контролируемого параметра заданию он располагается по середине обмотки задатчика. Отклонение параметра от задания вызывает пропорциональное перемещение ползунка относительно обмотки задатчика в диапазоне +10% шкалы прибора.
Рисунок 5. Схема 10%-ного реостатного задатчика.
Схема 100%-ного реостатного задатчика включает реохорд-датчик Rр, резистор-датчик Rз и дополнительное переменное сопротивление Rg (рисунок 6). Ползунок реохорда-датчика Rр жестко связан с движком реохорда измерительной схемы прибора. Каждому значению измерительного параметра соответствует определенное положение ползунка реохорда.
Параллельно реохорду-датчику включен переменный резистор задатчик Rc, ползунок которого жестко связан с механизмом установки задания.
Рисунок 6. Схема 100%-ного реостатного задатчика.
На схему подается напряжение питания Uп не большее 12 В. При соответствии значения регулируемого параметра заданному значению сопротивления реохорда задатчика равны и сигнал рассогласования равен нулю. При отклонении регулируемого параметра от заданного значения ползунок реохорда-датчика соответственно переместится, сопротивление его изменится и с выхода реостатного задатчика на вход электрического регулятора поступит сигнал рассогласования, пропорциональный величине изменения регулируемого параметра.
Дискретные (релейные) регуляторы. В объектах, где не требуется высокая точность регулирования параметров, широко используется принцип дискретного двухпозиционного регулирования посредством релейных регуляторов.
Рассмотрим принцип действия релейного регулятора уровня жидкости рисунок 7. Он состоит из чувствительного элемента (поплавка), задающего устройства поплавковой камеры с катушками индуктивности, являющихся двумя плечами узла сравнения схемы измерительного моста с сопротивлениями R1 и R2, усилителя на полупроводниках, выходного нейтрального электромагнитного реле с двумя парами контактов, управляющих электрическим исполнительным механизмом, установленным на линии подвода жидкости к аппарату.
а) в)
Рисунок 7 - Схема дискретного регулятора уровня:
а – принципиальная; б - структурная;
При изменении уровня Н в поплавковой камере поплавок перемещается, изменяя индуктивность катушек (напряжение U), что приводит к возникновению сигнала рассогласования ∆U в диагонали мостовой схемы. Сигнал рассогласования подается на электронный усилитель, который за счет энергии питания Uп усиливает сигнал Uвых, подаваемый в катушку реле К. Контакты реле К1 и К2 замыкают или размыкают цепь питания а, b соленоидного вентиля, который соответственно открывает или закрывает подачу жидкости в аппарат. Уровень жидкости может изменяться от Нмин до Нмакс.