

Основные типы преобразователей. Унифицированные преобразователи механических перемещений и усилий в стандартные сигналы
Механоэлектрический преобразователь типа Э-2Д (рисунок 19) предназначен для непрерывного преобразования углового или линейного перемещения чувствительного элемента в пропорциональный сигнал постоянного тока. Преобразователь состоит из блока питания П-8, высокочастотного генератора Э-8 и гальванометра Г-8.
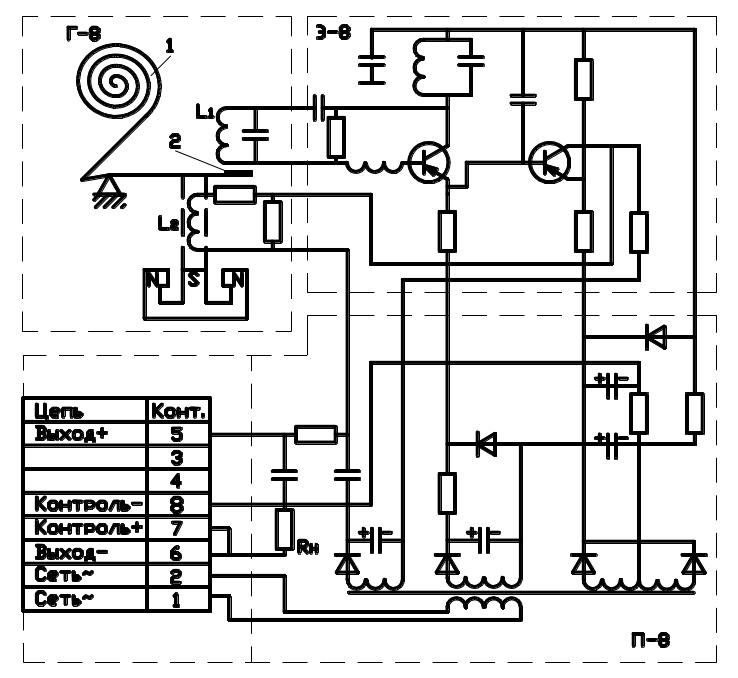
Рисунок 19
Под действием чувствительного элемента закручивается или раскручивается спиральная пружина 1, вызывая перемещение алюминиевого флажка 2 относительно индуктивности L1 колебательного контура генератора. Перемещение флажка изменяет режим работы генератора, в результате чего изменяется ток. Последний, протекая по резисторам нагрузки RH1, RH2 и обмотке обратной связи L2, механически связанной с рычагом флажка и находящейся в поле постоянного магнита, создает момент, равный по величине и направленный навстречу моменту чувствительного элемента. При каждом равновесном состоянии усилие обратной связи возвращает рычаг с флажком в исходное состояние. По величине тока, изменяющегося в пределах 0 – 5мА, судят о контролируемом параметре.
Струнный (частотный) преобразователь типа ПО (рисунок 20) предназначен для преобразования угловых перемещений в унифицированный частотный сигнал.
Металлическая немагнитная струна 1, находящаяся в щели кольцевого постоянного магнита 2, при протекании тока по ней колеблется.
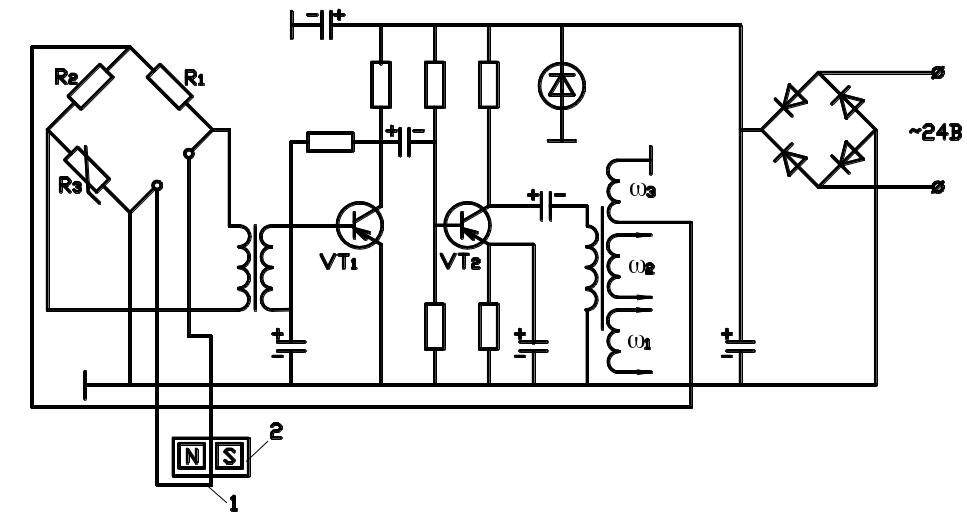
Рисунок 20
Частоту собственных колебаний струны определяют по уравнению
![]()
где 1 – собственная частота колебаний пружины;
l – длина рабочего участка струны;
F – растягивающее усилие, приложенное к струне;
p – масса, приходящаяся на единицу длины струны, так называемая
плотность струны.
Из уравнения видно, что при известных геометрических размерах и массе струны частота собственных колебаний ее зависит от приложенного к ней растягивающего усилия, создаваемого чувствительным элементом при изменении контролируемого параметра.
Энергию для поддержания незатухающих колебаний струна, включенная в одно из плеч омического моста R1 – R3, получает от транзисторного автогенератора, питающего мост с помощью положительной обратной связи (обмотка 3).
Система мост – двухкаскадный усилитель на транзисторах VT1 и VT2 с общим коэффициентом усиления около 5000 составляет автогенератор, который работает на частоте собственных колебаний струны.
Температурные изменения моста компенсируются сопротивлением резистора R3, выполненного из меди, имеющего примерно такой же температурный коэффициент сопротивления, как и вольфрам, из которого изготовлена струна. Выходной сигнал снимается с обмоток 1 и 2.
Преобразователи ферродинамические токовый (ПФТ) и напряжения (ПФН), структурная схема которых изображена на рис. 21, предназначены для связи приборов с ферродинамическими преобразователями ПФ с электрической аналоговой ветвью ГСП.
В основу преобразователя положена статическая автокомпенсационная схема с большой отрицательной обратной связью по току.
При достаточно большом коэффициенте усиления входное напряжение UВХ преобразователя ПФ мало отличается от напряжения обратной связи
![]()
где m – коэффициент пропорциональности между эффективным и средним значением тока нагрузки;
RO.C – сопротивление обратной связи;
IH – ток нагрузки.
Выпрямленный с помощью двухполупериодного мостового выпрямителя B выходной ток поступает в нагрузку RH.
Для преобразования пневматического сигнала, изменяющегося в диапазоне от 0,2 до 1 кгс/см2, в пропорциональное перемещение плунжера дифференциально-трансформаторного преобразователя предназначен пневмоэлектрический преобразователь типа ППЭ-6 (рисунок 21).
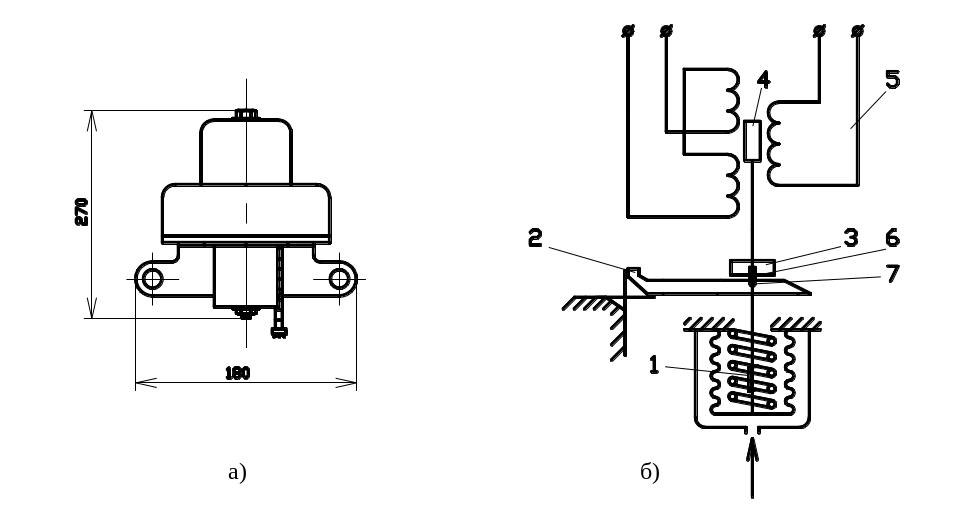
Рисунок 21
Плунжер ПДТ связан с донышком сильфона 8 через биметаллический термокомпенсатор 1 и корректирующий узел, состоящий из рычага 2, ролика 7, винта 6 и кронштейна 3. С помощью корректирующего узла производят соглосования статических характеристик ПДТ преобразователя ППЭ-6 со статическими характеристиками ПДТ вторичных приборов, имеющих ход плунжера до 5мм.
При изменении входного давления сжатого воздуха перемещается плунжер 4 ПДТ, во вторичной обмотке которого возникает сигнал рассогласования, поступающий в линию дистанционной передачи вторичного прибора. Первичная обмотка ПДТ преобразователя 5 питается питается напряжением 20В. Основная погрешность хода плунжера не превышает 1%.
Преобразователи стандартных сигналов с одного вида энергии в другой и функциональные преобразователи
Электропневмопреобразователь типа ЭПП-63 (рисунок 22) предназначен для преобразования непрерывного сигнала постоянного тока 0 – 5 мА в пропорциональный пневматический сигнал 0,2 – 1 кгс/с.
Преобразователь ЭПП-63 состоит из электромеханического преобразователя и пневматического усилителя, которые связаны между собой системой обратной связи и реле типа “сопло – заслонка”.
Постоянный ток, проходя по виткам катушки 1, создает усилие втягивания катушки в зазор постоянного магнита 11, уравновешиваемое усилием сильфона обратной связи 7.
При увеличении тока уменьшается зазор между соплом 3 и заслонкой 2, укрепленной на рычаге 4, увеличивается давление воздуха в междроссельной камере 10 пневмоусилителя. Это увеличит степень открытия клапана 8, в результате чего увеличится давление в камере 9 усилителя, соединенной с сильфоном обратной связи.
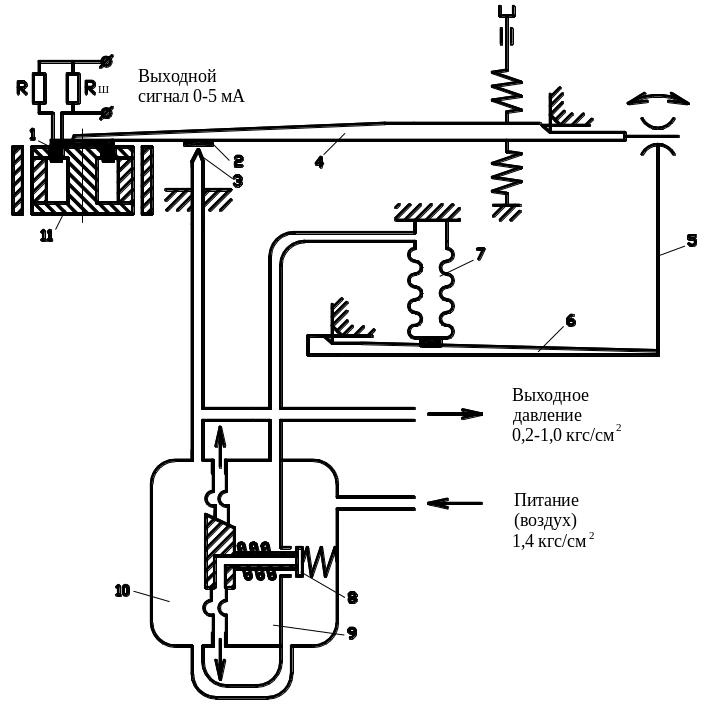
Рисунок 22
Под действием возросшего давления в сильфоне обратной связи перемещается вниз рычаг 6, соединенный гибкой связью 5 с рычагом заслонки 2, увеличивается зазор между последней и соплом. Равновесие рычажной системы восстановится при вполне определенном соотношении между выходным давлением и входным током. При уменьшении тока давление воздуха уменьшается.
В преобразователе ЭПП-63 применена система термокомпенсации, состоящая из медного шунта RШ и манганинового резистора R.
Основная погрешность выходного сигнала при температуре окружающей среды 20 C не более от измерительного диапазона. Длина трассы передачи пневматических импульсов – до 300м.
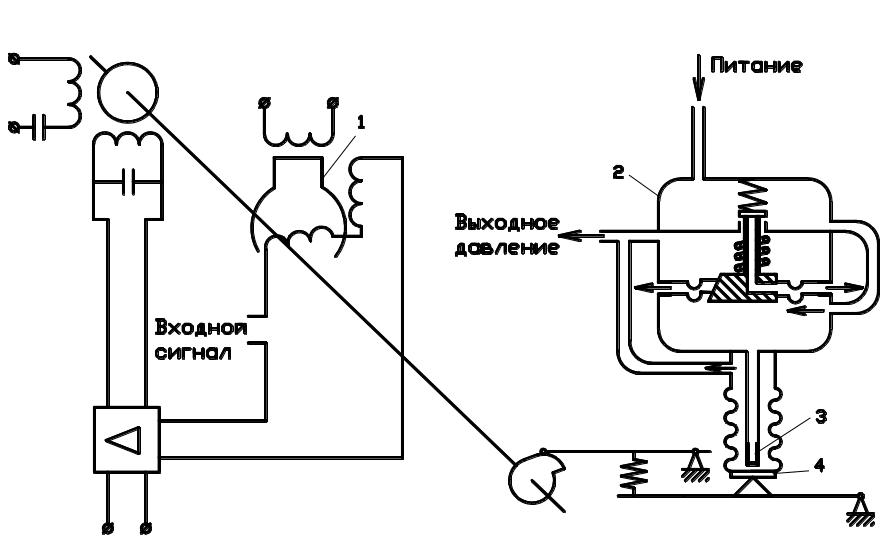
Рисунок 23
1 – ферродинамический преобразователь типа ПФ-4; 2 – пневмоусилитель;
3 – сопло; 4 – заслонка
Электропневмопреобразователь типа ПЭПФ (рисунок 23) предназначен для преобразования напряжения промышленной частоты, снимаемого с ферродинамического преобразователя типа ПФ-4 в пропорциональный пневматический сигнал 0,2 – 1 кгс/см2.
Пневмоэлектрический преобразователь полупроводниковый типа ППП-1 (рисунок 24) выполнен по схеме с полной силовой электрической компенсацией и работает следующим образом. Подвижный конец манометрической двухвитковой трубчатой пружины 1 под действием входного давления перемещает рычаг 2, на конце которого укреплен флажок 4. При изменении зазора между флажком 4 и катушкой индуктивности L1 колебательного контура высокочастотного генератора, выполненного по двухконтурной схеме на транзисторе VT1, изменяется выходное напряжение генератора. Это напряжение через конденсатор С1 и диод VД1 подается на двухкаскадный полупроводниковый усилитель на транзисторах VT2 и VT3, с выхода которого снимается токовый сигнал.
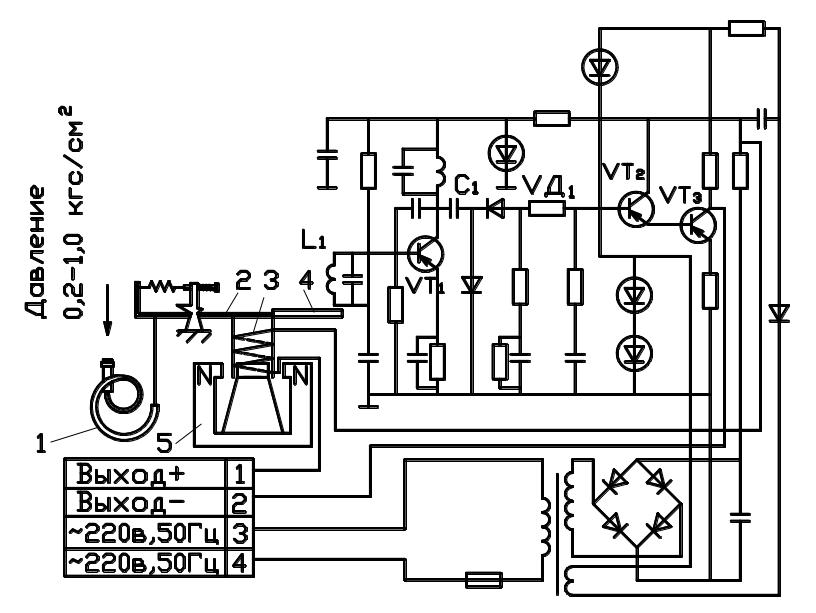
Рисунок 24
Выходной ток, протекая по виткам катушки обратной связи 3, находящейся в поле постоянного магнита 5, создает усилие на рычаг 2, равное по величине и противоположное по направлению усилию, которое развивает чувствительный элемент – манометрическая трубчатая пружина. Основная допустимая погрешность преобразователя не превышает 0,5% от максимального значения выходного сигнала.
В схемах умножения и деления приборов ферродинамического комплекса (рисунок 25) используются преобразователи ферродинамические типа ПЭФ и ПЭФ-К. ПЭФ-К имеет корректирующее устройство, с помощью которого устанавливают необходимую величину коэффициента обратной связи.
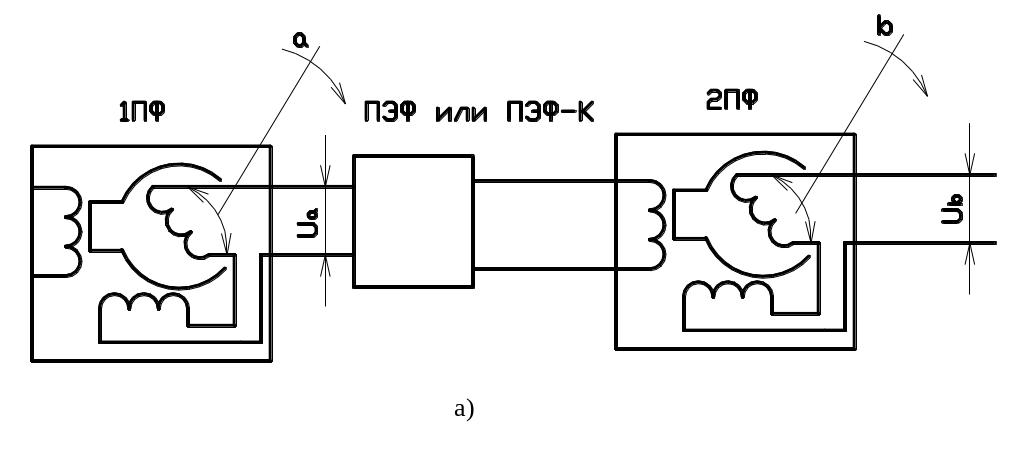
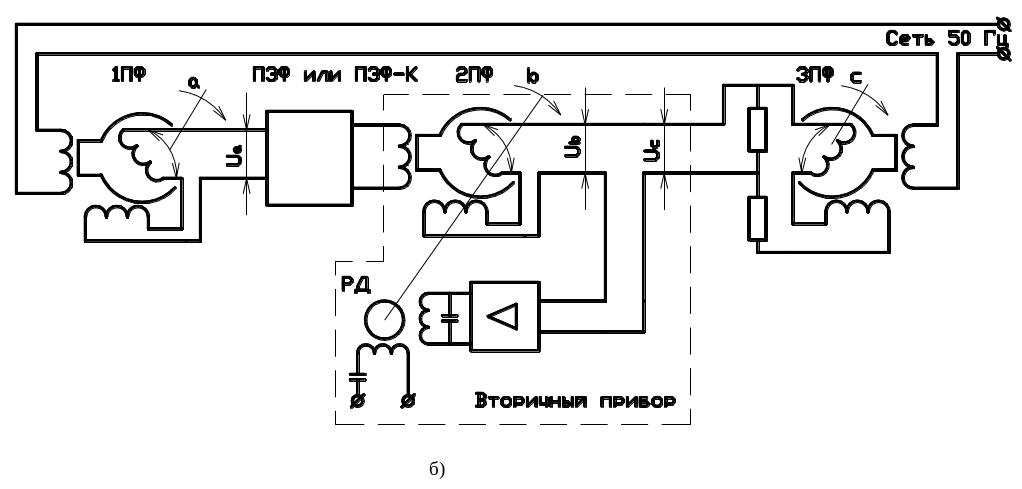
Рисунок 25 Схемы с применением приборов ферродинамического комплекса:
а – умножения; б – деления
На вход преобразователей типа ПЭФ или ПЭФ-К подается напряжение от ферродинамического преобразователя ПФ, которое представляет в схемах умножения (рисунок 25, а) – множимое, а в схемах деления (рисунок 25, б) – делитель. Нагрузкой преобразователей служат две последовательно включенные обмотки возбуждения ферродинамических преобразователей нечетных модификаций, каждая из которых рассчитана на напряжение 60 В.
Преобразование в унифицированные электрические и пневматические сигналы любой величины, предварительно преобразованной в угол поворота рамки ферродинамического преобразователя ПФ или в перемещение плунжера дифтрансформаторного преобразователя ПД, осуществляется при помощи функциональных ферродинамических преобразователей типа ПФФ и ПФФ-К (последний с коррекцией).
Ферродинамические преобразователи типа ПФФ и ПФФ-К снабжены выходными преобразователями: ПС (струнными), ПФ (ферродинамическими), ПП (пневматическими) и БД (сельсинными), что дает возможность выдавать электрические и пневматические сигналы, пропорциональные измеряемой величине.
Наличие в преобразователях ПФФ и ПФФ-К основных выходных преобразователей, отвечающих требованиям ГСП, позволяет применять их в схемах суммирования, умножения, соотношения и других вычислительных схемах, в системах регулирования и телеизмерения.
Преобразователи ПФФ и ПФФ-К могут иметь до трех выходных преобразователей в различных модификациях и одно сигнализирующее или регулирующее позиционное устройство.
Преобразователи типа ПФФ-К отличаются от преобразователей типа ПФФ тем, что ПФФ-К преобразует входной сигнал с автоматическим вводом коррекции по измеряемому параметру, например, плотность жидкости с автоматическим вводом коррекции по температуре, или расход газа с коррекцией по давлению, температуре и влагосодержанию.
Принципиальные схемы преобразователей типов ПФФ и ПФФ-К показаны на рисунок 26.
Принцип работы электрической схемы преобразователя типа ПФФ (рисунок 26, а) такой же, как в типовом измерительном комплекте с ферродинамическими преобразователями.
В преобразователе ПФФ-К измеряемая э.д.с. Е1 (рисунок 26,б) ферродинамического преобразователя ПФ первичного прибора 1 и э.д.с. корректирующего чувствительного элемента (например, термометра сопротивления Rt) уравновешиваются э.д.с. Е2 компенсирующим ферродинамическим преобразователем 2 преобразователя ПФФ-К.
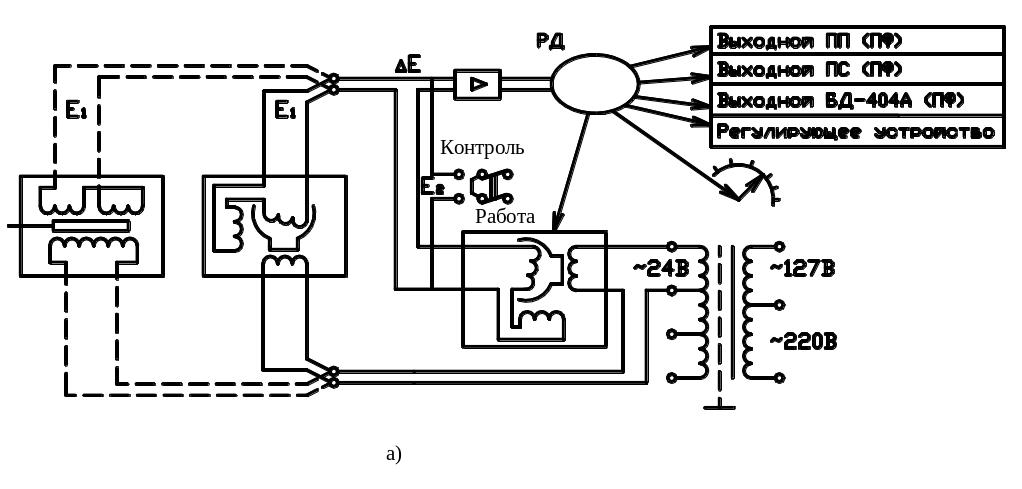
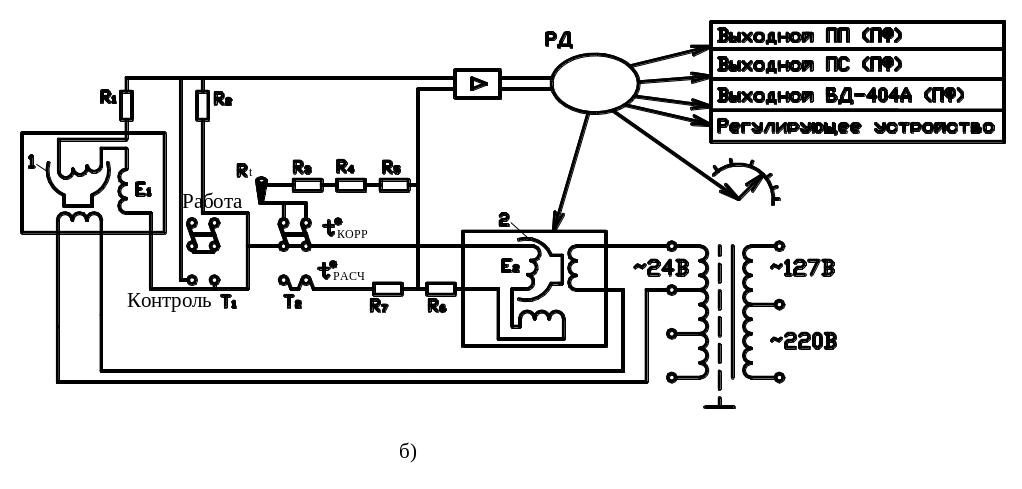
Рисунок 26 Принципиальные схемы преобразователей функциональных:
а – типа ПФФ; б – типа ПФФ-К
В процессе измерения, когда тумблер Т1
находится в положении «Работа», а тумблер
Т2 – в положении «![]() »
,входная э.д.с. Е1 поступает на
делитель, состоящий из резисторов R1
и R2. С резистора R2
снимается напряжение Uк.
Э.д.с. Е2 компенсирующего
преобразователя ПФ поступает на делитель,
Э состоящий из резистора R6
и последователь соединенных резисторов
R5, R4,
R3 и термометра
сопротивления Rt.
С делителя снимается компенсирующее
напряжение Uк,
которое сравнивается с напряжением UR,
и их разность после усиления питает
реверсивный двигатель РД. Последний
поворачивает рамку компенсирующего ПФ
и подвижные системы выходных
преобразователей до момента равенства
UR –
Uк = 0.
»
,входная э.д.с. Е1 поступает на
делитель, состоящий из резисторов R1
и R2. С резистора R2
снимается напряжение Uк.
Э.д.с. Е2 компенсирующего
преобразователя ПФ поступает на делитель,
Э состоящий из резистора R6
и последователь соединенных резисторов
R5, R4,
R3 и термометра
сопротивления Rt.
С делителя снимается компенсирующее
напряжение Uк,
которое сравнивается с напряжением UR,
и их разность после усиления питает
реверсивный двигатель РД. Последний
поворачивает рамку компенсирующего ПФ
и подвижные системы выходных
преобразователей до момента равенства
UR –
Uк = 0.
При изменении сопротивления Rt, вызванного изменением температуры измеряемого параметра, изменяется напряжение Uк и двигатель РД поворачивает рамку компенсирующего ПФ до нового равновесия, т.е. вновь восстанавливается равенство UR – Uк = 0. При изменении измеряемого параметра изменяется э.д.с. Е, которая также компенсируется э.д.с. Е1 компенсирующего преобразователя 2.
Из принципа действия преобразователя ПФФ-К видно, что угол поворота подвижной системы выходных преобразователей зависит не только от величины входного напряжения, пропорционального измеряемому параметру, но и от его температуры.
При переключении тумблеров Т1 и
Т2 соответственно в положения
«Контроль» и «![]() »
на вход усилителя поступает только
э.д.с. Е1 компенсирующего
преобразователя. В этом случае стрелка
прибора устанавливается на среднюю
отметку шкалы для преобразователя ПФ-2
и на начальную – для ПФ-4. Основная
погрешность преобразователей ПФФ и
ПФФ-К по контрольной шкале ±0,5%.
»
на вход усилителя поступает только
э.д.с. Е1 компенсирующего
преобразователя. В этом случае стрелка
прибора устанавливается на среднюю
отметку шкалы для преобразователя ПФ-2
и на начальную – для ПФ-4. Основная
погрешность преобразователей ПФФ и
ПФФ-К по контрольной шкале ±0,5%.
Основная погрешность выходного сигнала для выходных преобразователей ПФ и ПС составляет ±1,0%, для выходного преобразователя ПП ±1,5%.
Питание от сети переменного тока 2205, 50 Гц.