

Чувствительность мостовых измерительных схем. Схемы включения датчиков
Важной
характеристикой измерительной схемы
является ее чувствительность – отношение
изменения выходной величины к изменению
измеряемой величины:
![]() ;
;
где Dx– изменение измеряемой величины;
Dy– изменение выходной величины.
Для моста чувствительность схемы по току можно определить:
![]() .
.
Ток в измерительной диагонали при изменении R1 на DR1:
![]() .
.
По
условию равновесия
![]() ,
то
,
то
![]() ,
тогда чувствительность схемы по току:
,
тогда чувствительность схемы по току:
![]() .
.
Чувствительность схемы по напряжению:
![]() ,
,
где M и N – величины входящие в знаменатель, в формулах для определения IПР.
В мостовых схемах можно использовать один или несколько датчиков, включая их в разные плечи.
Рассмотрим некоторые варианты.

Простейшие и наиболее распространенной схемой является равноплечий мост с одним датчиком, в котором R2=R3=R4=R;
R1=R+DR (рисунок 2)
где R – сопротивление датчика при отсутствии воздействия на него контролируемой величины. Ток через прибор при R1=R+DR составит:
![]()
![]()
![]() ,
,
при условии, что DR<<R получим:
![]() .
.
Так
как
![]() ,
S0
– чувствительность моста с одним
датчиком.
,
S0
– чувствительность моста с одним
датчиком.
Включим второй такой же датчик в противоположное плечо (рисунок 3).
В
этом случае:
![]() ,
т.е. чувствительность схемы SСХ=2×S0,
в два раза больше, чем в схеме с одним
датчиком.
,
т.е. чувствительность схемы SСХ=2×S0,
в два раза больше, чем в схеме с одним
датчиком.
Аналогичный результат можно получить, если второй датчик включить не в противоположное, а в соседнее плечо, но выполнить его так, чтобы он имел противоположный знак приращения (рисунок 4 – а, б)
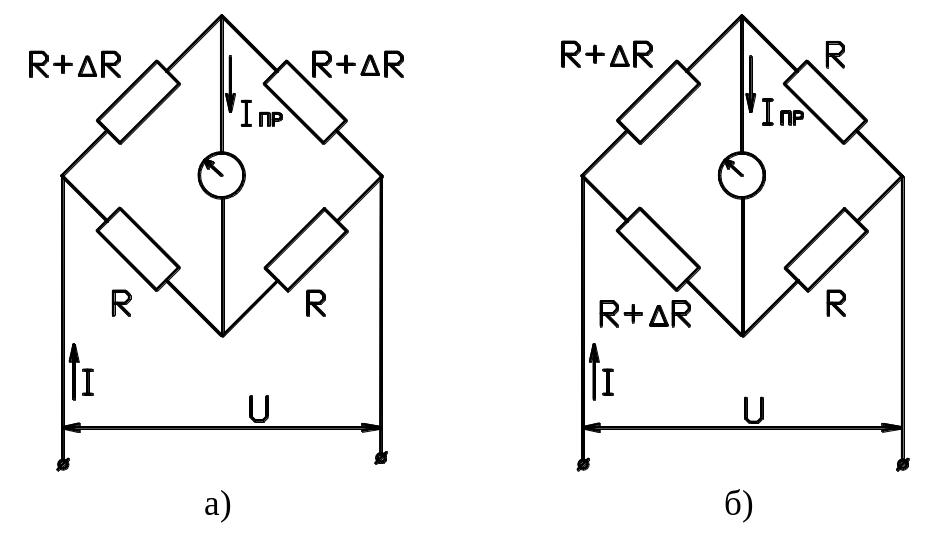
Рисунок 4
В этом случае: , т.е. SСХ=2×S0.
Если включить датчики в противоположные или смежные плечи, как показано на рисунке 5, то в этих двух вариантах DIПР=0 и чувствительность схемы SX=0:
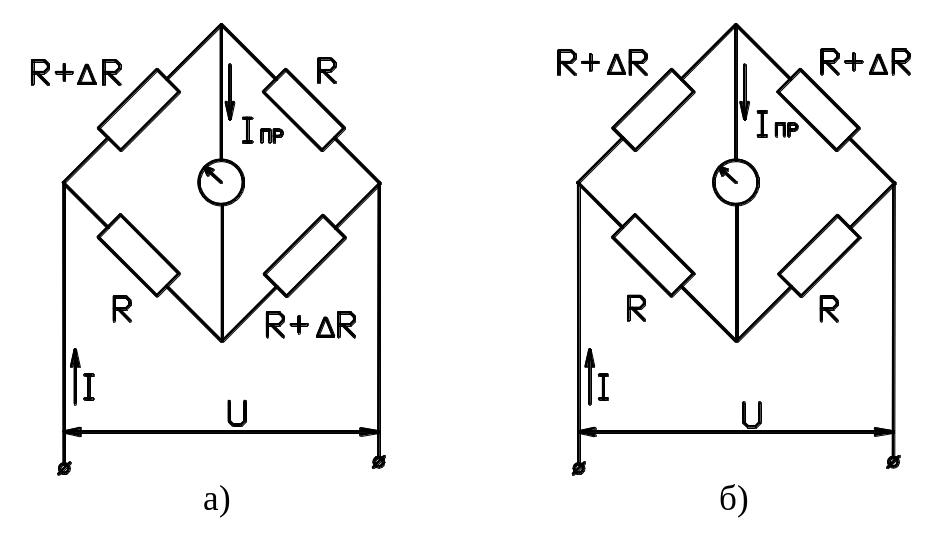
Рисунок 5
Если мост образован из четырех датчиков (рисунок 6), то ток в измеритель ном приборе определяется:

![]()
и SХ=4×S0, т.е. чувствительность моста будет максимальной.
Мостовые схемы на переменном токе.
Мостовая схема на переменном токе (рисунок 7) тождественна мостовой схеме на постоянном токе при условии замены активных сопротивлений моста полными сопротивлениями. Четыре плеча моста образуются четырьмя полными сопротивлениями Z1, Z2, Z3, Z4. В диагонали АВ моста подключен источник питания переменного тока Е, а в диагональ БГ включен измерительный прибор.
Ток в измерительной диагонали определяется:
![]()
![]()
Условие равновесия моста Z1 ×Z4=Z2 ×Z3. Т.к. полные сопротивления являются комплексными величинами, характеризующиеся не только модулем, но и фазовым углом j, можно записать:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
,
где z1, z2, z3, z4 – модули.
В соответствии с условием равновесия моста:
![]()
![]() и
и
![]()
Таким образом, получаем два независимых условия равновесия. В отличие от мостов постоянного тока, имеющих одно уравнение равновесия, мосты переменного тока имеют два уравнения и для их уравновешивания необходима регулировка не менее двух параметров схемы. Трудность регулировки равновесия моста переменного тока заключается в том, что в процессе обеспечения одного условия (равенство модулей) нарушается другое (равенство углов фазовых сдвигов между током и напряжением в плечах моста). Обычно такие мосты регулируются методом последовательных приближений.
Измерительная схема автоматического уравновешенного моста (рисунок 8) состоит из четырех сопротивлений R1, R2, R3, R4. Сопротивление R4 является переменным, оно изменяется пропорционально измеряемой величине.
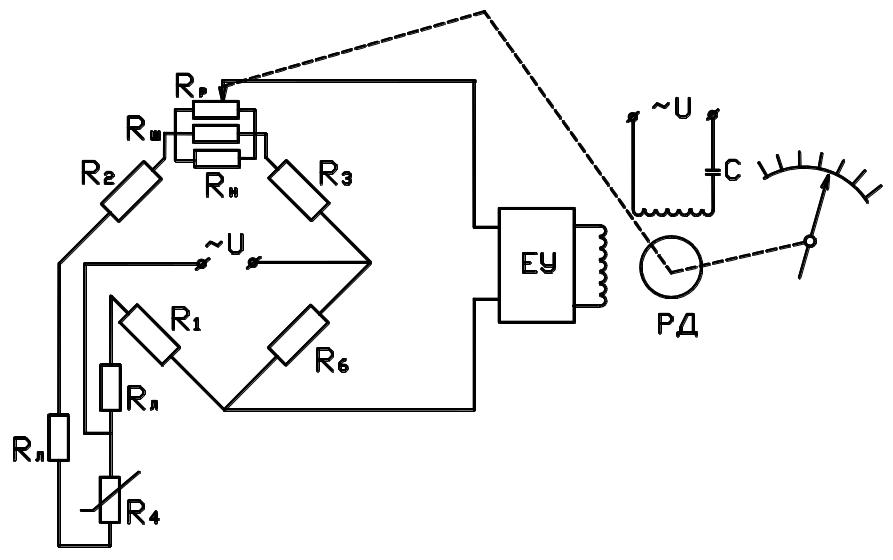
Рисунок 8
Для уравновешивания моста в его схему включен реохорд RR, движок которого связан с реверсивным двигателем РД. В диагональ питания ”ав” включен источник питания U, в измерительную диагональ “бг” – электронный усилитель ЭУ. Под действием изменения измеряемой величины изменяется сопротивление R4, при этом нарушается равновесие моста и на выход усилителя подается напряжение разбаланса; знак напряжения зависит от того, увеличилось или уменьшилось сопротивление R4.
В результате включается реверсивный двигатель РД и перемещает движок реохорда до тех пор, пока не наступит равновесие моста. Так как каждому значению измеряемой величины соответствует определенное значение сопротивления плеча R4, то положение движка реохорда при уравновешивании моста всегда будет соответствовать определенному значению измеряемой величины. Шкала моста градуируется в единицах измеряемой величины.
В схему уравновешенного моста входят: сопротивление Rш, служащее для подгонки RR, сопротивление RН, RП для подгонки предела измерения моста, RЛ для подгонки сопротивлений соединительных проводов датчика.
На величину сопротивления соединительных проводов влияет температура окружающей среды, что приводит к погрешностям при измерениях. Для исключения влияния применяют трехпроводную схему подключения датчика. Применение третьего соединительного провода ”ад” перемещает одну из вершин моста непосредственно в головку датчика, в результате чего один провод линии оказывается включенным в одно плечо моста, а другой – в другое, смежное плечо. Оба провода имеют одинаковую длину и прокладываются рядом, поэтому их сопротивления и температурные изменения одинаковы и не вызовут нарушения равновесия моста.
Логометр – прибор магнитоэлектрической системы (рисунок 9). Действие его основано на взаимодействии неравномерного магнитного поля неподвижного постоянного магнита и магнитных полей, образованный токами, протекающими в двух скрещенных под углом и жестко связанных между собой подвижных рамках.
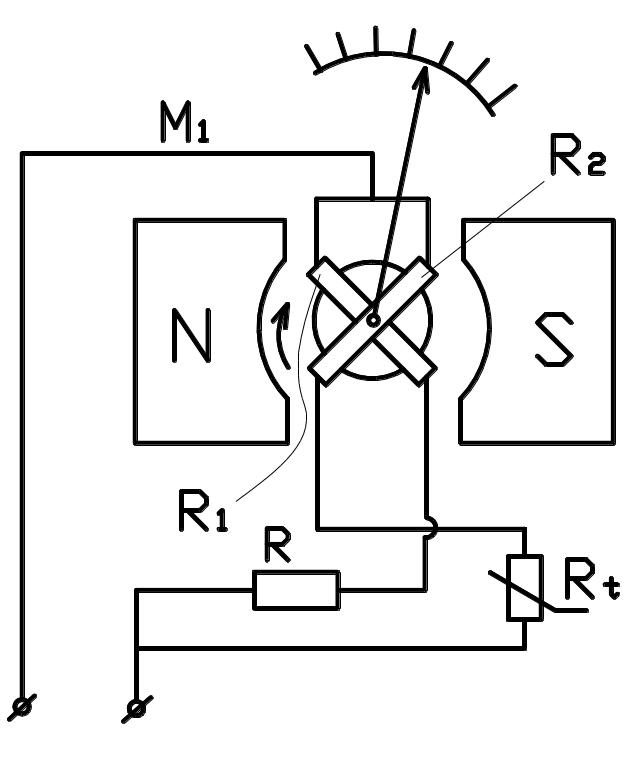
Рисунок 9
Рассмотрим схему логометра. Между полюсными наконечниками постоянного магнита расположен стальной цилиндрический сердечник, который образует с ними переменный воздушный зазор, увеличивающийся от середины наконечников к их краям.
Благодаря этому магнитная индукция уменьшается от середины к краям. В зазорах перемещаются одинаковые скрещенные рамки R1 и R2, жестко скрепленные между собой и со стрелкой прибора.
Измерительная схема логометра состоит из параллельных цепей, получающих питание от одного источника.
В одну цепь включена рамка R2 и постоянное сопротивление R, в другую – рамка R1, измеряемое сопротивление RX. Через рамки R1 и R2 протекают токи I1 и I2 образующие свои магнитные поля, которые, взаимодействуют с полем постоянного магнита, создают вращающие моменты М1 и М2, направленные навстречу друг другу.
Величина момента каждой рамки зависит от напряженности магнитного поля и от силы тока, проходящего по рамке:
M1=C1×H1×I1; M2=C2 ×H2 ×I2,
где М1 и М2 – моменты, развиваемые рамками;
Н1 и Н2 – напряженность магнитного поля рамки;
I1 и I2 – токи в рамках;
C1 и С2 – коэффициенты пропорциональности.
Если сопротивление RX равно сопротивлению резистора R, то точки, проходящие по обеим рамкам, одинаковы. Момент М1 равен моменту М2 и рамки находятся в равновесии.
При увеличении температуры измеряемой среды, сопротивление термометра сопротивления увеличится, и сила тока в цепи рамочки с терморезистором уменьшится. Это приведет к уменьшению момента М2 и сердечник начнет поворачиваться и стрелка логометра пойдет по шкале.
Рамка, в цепи которой стоит резистор R1, при повороте сердечника начнет выходить из зоны сильного магнитного поля в зону ослабленного поля, а рамка, в цепи которой находится термометр сопротивления, наоборот, будет входить во все более усиливающееся поле.
Вследствие изменения напряженности поля момент М1 уменьшается, а момент М2 – увеличивается. Когда момент М2 станет равным моменту М1, сердечник остановится.
Каждому положению рамки соответствует своя напряженность магнитного поля в зазоре сердечника, поэтому угол поворота сердечника пропорционален изменению сопротивления термометра или температуре измеряемой среды.
Дифференциальные схемы.
Дифференциальные схемы – это электрическая цепь из двух смежных контуров, в каждом из которых действует своя э.д.с., а измерительный прибор включается в общую ветвь и реагирует на разность контурных токов.
Дифференциальные схемы используются в двух режимах:
При неизменных сопротивлениях обоих контуров изменяется одна или обе э.д.с. (рисунок 10)
При подаче напряжения на первичную обмотку катушки по ее виткам протекает переменный ток, создающий переменную магнитодвижущую силу iw, которая в свою очередь, создает переменный основной магнитный поток Ф, замыкающийся по стальному магнитопроводу. Замыкаясь, магнитный поток Ф оказывает сцепление как с первичной, так и со вторичной обмотками.
Магнитный поток индуцирует в первичной обмотке э.д.с. самоиндукции, действующее значение которой
![]() ,
,
а во вторичной обмотке э.д.с. взаимоиндукции
![]() ,
,
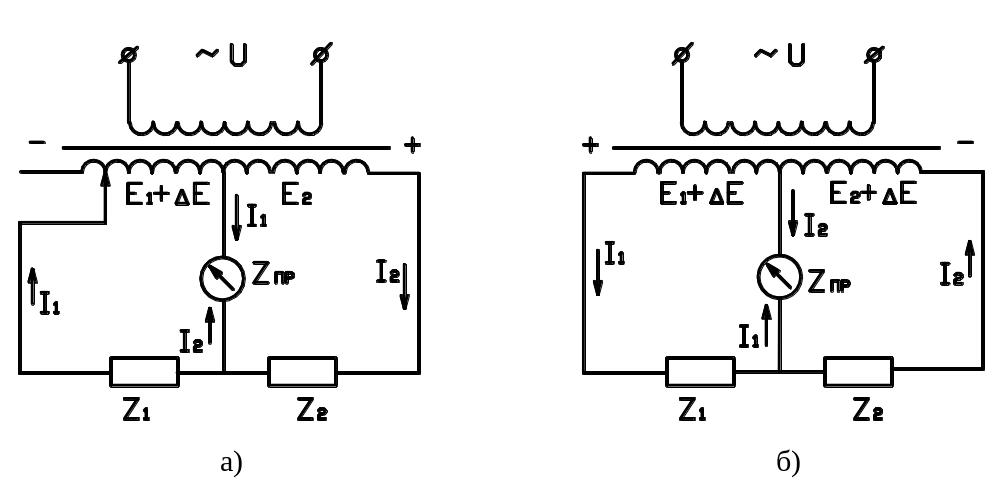
Рисунок 10
Т.к. частота э.д.с. одинакова и индуцируются они одним и тем же магнитным потоком, то первичная э.д.с. отличается от э.д.с. индуцируемой на вторичной обмотке только в том случае, если число витков w1 и w2 неодинаково. Чем больше число витков обмотки, тем больше э.д.с. в ней индуцируется.
Таким образом, рассматриваемые схемы уравновешены, если Е1=Е2. Изменение Е1 на величину DЕ (может быть вызвано перемещением движка) приводит к возникновению разностного тока и перемещению стрелки прибора. Использование второй схемы предпочтительно, т.к. чувствительность ее возрастает в 2 раза.
При неизменных одинаковых (по величине и по фазе) э.д.с. меняется сопротивление одного или обоих плеч (рисунок 11).
Изменение сопротивления приводит к изменению тока и возникновению тока прибора.
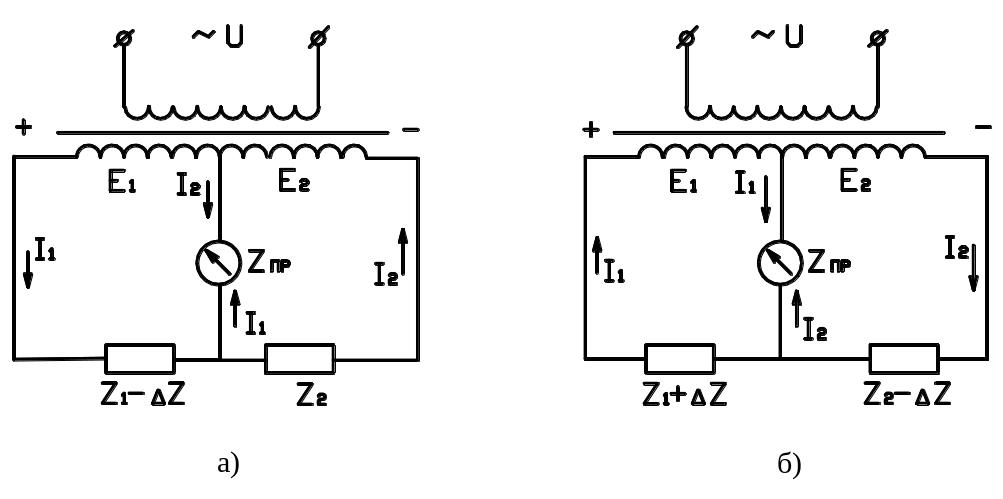
Рисунок 11
Если поменять местами измерительный прибор и источник питания переменного тока, то получится схема с дифференциальным трансформатором, имеющим три обмотки (рисунок 12).
Рассмотрим
принцип работы этой схемы. Если схема
уравновешенна, то I1=I2
и, следовательно, магнитные потоки,
создаваемые обмотками
![]() и,
и,
![]() будут также равны, т.е.
будут также равны, т.е.
![]() .
Так как эти потоки действуют встреч но,
то во вторичной обмотке w2
э.д.с. не наводится, поэтому ток в приборе
равен нулю.
.
Так как эти потоки действуют встреч но,
то во вторичной обмотке w2
э.д.с. не наводится, поэтому ток в приборе
равен нулю.
При
изменении сопротивления плеча Z±DZ
равенство токов и магнитных потоков
нарушается, в магнитопроводе трансформатора
появляется результирующий поток
![]() ,
который наводит во вторичной обмотке
э.д.с. В этом случае в приборе появляется
разностный ток IP=I1–I2,
амплитуда которого пропорциональна
величине Z±DZ,
а фаза определяется величиной большего
из токов. Обычно такие схемы позволяют
обеспечить согласование выходного
сопротивления, например, усилителя, с
сопротивлением нагрузки для максимального
использования усилителя мощности.
,
который наводит во вторичной обмотке
э.д.с. В этом случае в приборе появляется
разностный ток IP=I1–I2,
амплитуда которого пропорциональна
величине Z±DZ,
а фаза определяется величиной большего
из токов. Обычно такие схемы позволяют
обеспечить согласование выходного
сопротивления, например, усилителя, с
сопротивлением нагрузки для максимального
использования усилителя мощности.
Чувствительность дифференциальных схем превышает чувствительность мостовой схемы.
Первый вариант: Чувствительность схемы по току:
![]()
Чувствительность схемы по напряжению:
Второй вариант: Чувствительность схемы по току:
![]()
Чувствительность схемы по напряжению:
Все дифференциальные схемы требуют стабилизации напряжения источника питания.
Дифференциально-трансформаторные схемы применяются для дистанционной передачи показаний (рисунок 13).

Рисунок 13
Измерительная система состоит из двух одинаковых трансформаторных катушек КТ1 и КТ2, электронного усилителя ЭУ и реверсивного двигателя РД, на валу которого закреплен профильный кулачок К.
Катушки имеют первичную и вторичную обмотки. Первичные обмотки включены последовательно и питаются напряжением переменного тока. Вторичные катушки выполнены в виде двух секций с одинаковым числом витков, включенных встречно. Вторичные катушки соединены последовательно и включены на вход усилителя. Внутри каждой катушки расположен сердечник.
При подаче тока в первичную обмотку катушки во второй индуцируется э.д.с.. Когда сердечник катушки датчика КТ1, механически связанный с чувствительным элементом, находится в среднем положении, э.д.с. Е1 и Е2, индуктируемые в каждой секции катушки, равны и направлены навстречу и разность их DU1=E1–E2=0.Если сердечник катушки вторичного прибора КТ2 тоже находится в среднем положении, то разность э.д.с. DU2=E3–E4 во вторичных обмотках будет также равна нулю. В результате напряжение на входе в усилитель DU=DU1–DU2=0 и измерительная схема находится в покое.
При изменении значения измеряемой величины Р сердечник катушки датчика сместится от среднего положения, распределение магнитных потоков во вторичных обмотках изменится и э.д.с. будут равны. На входе усилителя появится напряжение DU=DU1–DU2 ,величина которого пропорциональна перемещению сердечника катушки КТ1, а знак зависит от направления перемещения сердечника от среднего положения. Напряжение разбаланса, усиленное ЭУ, подается на управляющую обмотку реверсивного двигателя РД. Последний с помощью кулачка К переместит сердечник катушки вторичного прибора в положение, при котором напряжение, индуктируемое во вторичной обмотке, окажется равным напряжению во вторичной обмотке, катушки датчика. Одновременно переместятся стрелки указателя и регистрирующего устройства вторичного прибора. Таким образом, сердечник катушки КТ2 ”следит” за положением сердечника катушки КТ1, а показывающее и регистрирующее устройства вторичного прибора отмечают соответствующие значения измеряемой величины.
Компенсационные схемы
Компенсационные схемы применяются для измерения различных параметров, величина которых преобразуется датчиками в изменение напряжения, э.д.с. и т.э.д.с. Компенсационные схемы обеспечивают наивысшую точность при измерении и широко используются для измерения э.д.с. термопар.
В основе работы компенсационных схем, также как и мостовых, лежит метод сравнения. Измеряемое напряжение уравновешивается разностью потенциалов, снимаемого с калиброванного сопротивления.
Схема включает два основных контура (рисунок 14): контур I образует цепь с источником постоянного тока Е, контур II – цепь измеряемого напряжения ЕХ. Измеряемая э.д.с. ЕХ или напряжение UX уравновешивается равным и противоположным по знаку падением напряжений U0(компенсирующее напряжение). Уравновешивающее падение напряжения между точками А и В создается на сопротивлении переменного резистора RР током I0, величина которого устанавливается регулировочным резистором R (реостатом) и контролируется миллиамперметром.
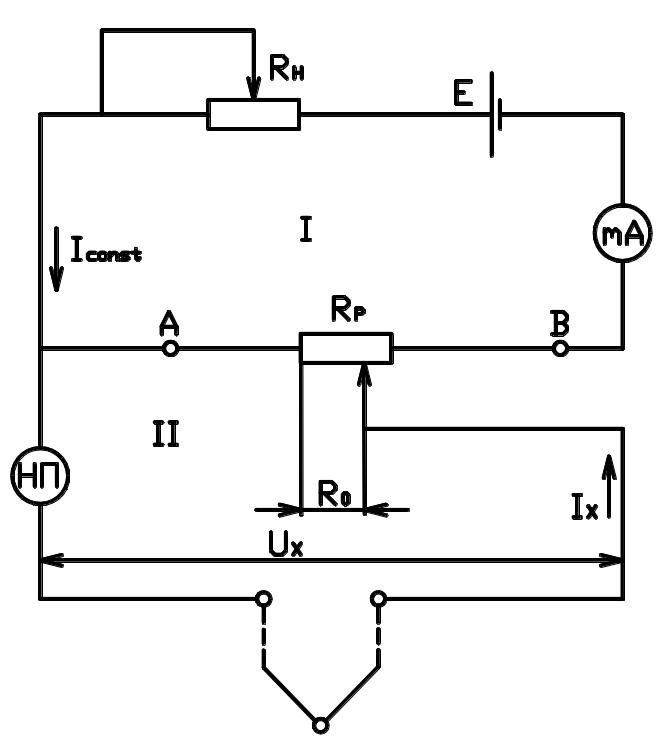
Рисунок 14
Ток в гальванометре, исполняет роль нулевого индикатора:
![]()
где UX – измеряемое напряжение;
U0 – компенсирующее напряжение;
RАВ – часть сопротивления переменного резистора;
RПР – сопротивление гальванометра;
RX – сопротивление исследуемой ветви (термопары).
Так как момент компенсации определяется по нулевому положению стрелки гальванометра (при IПР =0), то UX=U0=I×R0, т.е. UX в момент компенсации всегда пропорционально R0 (часть сопротивления переменного резистора), а значит и перемещению движка (при равномерной намотке резистора). Таким образом, линейное перемещение движка резистора будет прямо пропорционально измеряемому параметру, поэтому шкала резистора может быть выражена в единицах измеряемого параметра.
Точность работы компенсационной схемы в значительной степени определяется стабильностью тока в переменном резисторе. Для поддержания постоянства этого тока применяют регулировочный резистор R.
Однако целесообразно применять источник постоянного тока, снабженный стабилизатором. Применение источника стабилизированного напряжения значительно упрощает измерительную схему (рисунок 15), так как не требует источника напряжения Е и регулировочного сопротивления RРЕГ. Следует отметить, что измерение UX происходит без потребления мощности от источника ЕХ (объект измерения), т.к. в момент отсчета измеряемой величины источник не дает тока во внешнюю цепь, что является достоинством метода, т.к. измеряемая величина не искажается. Кроме того, при компенсационном методе исключается влияние температурных изменений сопротивлений соединительных проводов на точность измерения, так как в момент уравновешивания ток влияния равен нулю.
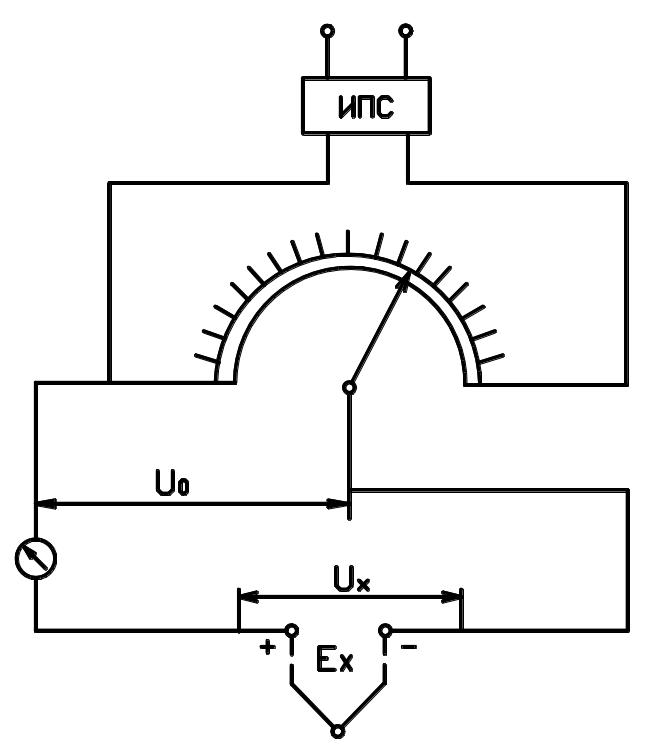
Рисунок 15
Уравновешивание схемы осуществляется вручную, либо автоматически (автоматические потенциометры).
Чувствительность компенсационной схемы.
Чувствительной компенсационной схемы:
![]()
где DIПР – приращение тока нуль - гальванометра;
DUX – приращение измеряемого напряжения.
В момент компенсации UX=U0 и через нуль-гальванометр не проходит ток. Если измеряемое напряжение UX изменится на величину DUX то через нуль-индикатор протечет разностный ток DIПР, значение которого согласно теореме об эквивалентном генераторе равно:
![]()
где UAB – напряжение на зажимах АВ при отключенной нагрузке (режим холостого хода);
RI – внутреннее сопротивление электрической цепи, измеренное на зажимах АВ при отключенной нагрузке (разомкнутом выключателе);
RПР – внутренне сопротивление нуль - индикатора;
RX – сопротивление исследуемой ветви (датчика).
Так как UAB=UX+DUX–U0, а в момент равновесия UX=U0, то UAB=DUX
Внутреннее сопротивление электрической цепи в режиме холостого хода:
![]()
где R0 – часть сопротивления переменного резистора;
RР – сопротивление переменного резистора;
RРЕГ – регулировочное сопротивление резистора;
Подставив полученные выражения в формулу для определения чувствительности получим:
![]()
 ,
,
так как UAB=DUX:
Анализ формулы показывает, что чувствительность компенсационной схемы зависит только от величины R0, т.е. от взаимного расположения движков резистора. Следовательно, чувствительность по шкале не постоянна:
при R0=0 или R0=RР+RРЕГ, когда движки резистора максимально сдвинуты или раздвинуты (RI=0), то чувствительность схемы стремится к максимуму;
при
 внутреннее сопротивление электрической
цепи имеет максимальную величину,
т.е.
внутреннее сопротивление электрической
цепи имеет максимальную величину,
т.е. ,
а чувствительность схемы наименьшая.
,
а чувствительность схемы наименьшая.
Автоматические электронные потенциометры
Принципиальная электрическая схема автоматического потенциометра типа КСП - 4 приведена на рисунке 16.
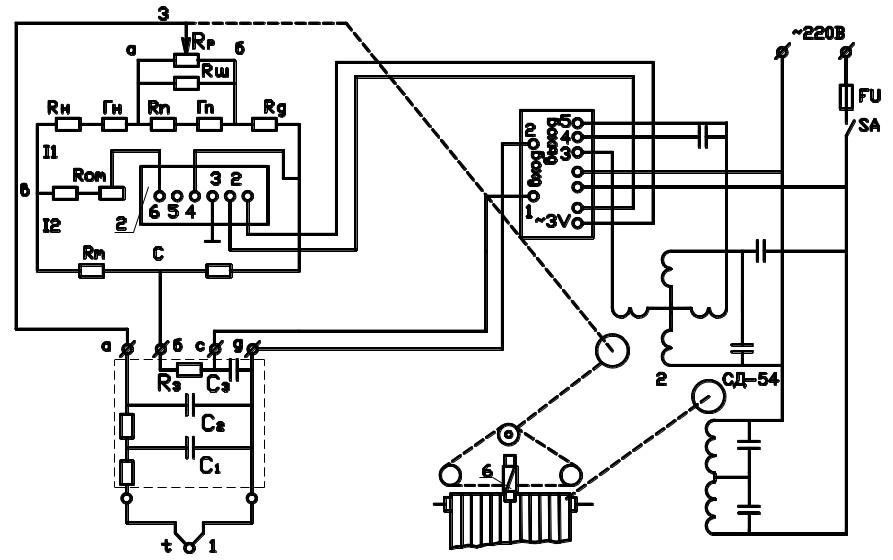
Рисунок 16
Термоэлектрический преобразователь (ТЭП) 1 включен последовательно с усилителем 4 в диагональ измерительного моста «ас», в другую диагональ «вг» включен источник стабилизированного напряжения 2. Усилитель 4 состоит из вибропреобразователя и электронных усилителей напряжения и мощности переменного тока. Он служит для преобразования постоянного тока в переменный и усиления последнего по напряжению и мощности. Для уменьшения внутренних и внешних наводок, поступающих с ТЭП и проводов, цепь термоэлектрического преобразователя шунтируется конденсаторами СФ1, СФ2, СФ3, последовательно с ТЭП включены резисторы RФ1 , RФ2 , которые образуют вместе с конденсаторами двойной Г – образный фильтр.
Работа автоматического электронного потенциометра заключается в следующем. Когда измеряемая термо-ЭДС, например, термоэлектрического преобразователя равна разности потенциалов в точках а и с, измерительная схема находится в равновесии (баланс моста), а в измерительной диагонали ток равен нулю. При изменении температуры термо - ЭДС термометра изменится, что вызовет разбаланс моста. В вершинах а и с появится разность потенциалов, а в измерительной диагонали – ток, поступающий на вход усилителя. Там он преобразуется и усиливается до величины, достаточной для приведения в действие реверсивного электродвигателя 5. Вал реверсивного электродвигателя с помощью шкива и тросиков связан со стрелкой указателя 6 (или кареткой в многоточечных приборах) прибора и движком реохорда 3, которые перемещаются соответственно по шкале и реохорду во время работы электродвигателя. Электродвигатель работает до установления равновесия измерительной схемы, в этот момент стрелка указателя 6 займет на шкале положение, соответствующее значению измеряемой величины.
Сопротивление RП служит для подгонки конца шкалы прибора. Для подгонки конца шкалы служит сопротивление RН, которое определяется из условия, что при измерении минимального значения температуры движок реохорда должен находится в начале шкалы (точка а), тогда термо - ЭДС термоэлектрического преобразователя должна компенсироваться падением напряжением в точках а – с измерительной схемы.
Необходимо помнить, что определенные расчетом RП и RН представляют сумму сопротивлений катушки и подгоночных спиралей rП, rН.
Сопротивление RОМ, ограничивающее ток в цепи источника питания, постоянно и равно 750 Ом, переменное сопротивление предназначен для подгонки величины рабочего тока в схеме, равно 56 Ом.