

Алгоритм исследования устойчивости замкнутой сау:
определяем передаточную функцию замкнутой системы
 где
Wпк(p)
– передаточная функция прямого канала
системы; Wос(p)
– передаточная функция обратной связи;
где
Wпк(p)
– передаточная функция прямого канала
системы; Wос(p)
– передаточная функция обратной связи;
записываем характеристическое уравнение замкнутой системы:
(Т1р+1)(Т2р+1)(Т3р+1)+k1k2k3=0;
после преобразования этого выражения получим:
Т1Т2Т3р3+(Т1Т2+Т1Т3+Т2Т3)р2+(Т1+Т2+Т3)р+(1+k1k2k3)=0;
обозначим:
а0=T1T2T3;
a1=Т1Т2+Т1Т3+Т2Т3;
а2=Т1+Т2+Т3;
а3=1+k1k2k3;
тогда выражение примет стандартную форму:
а0р3+а1р2+а2р+а3=0;
условия устойчивости замкнутой системы 3-го порядка:
а0>0, a1>0, a2>0, a3>0 (условие Рауса);
a1a2>a0a3 (условие Гурвица);
если условия устойчивости имеют место, то система устойчива;
система на границе устойчивости, если выполняется равенство в условии Гурвица, отсюда определяется критическая величина передаточного коэффициента разомкнутой системы:
![]() ;
;
заключение об устойчивости системы.
Приложение 4
Приложение 5
Пример
Передаточная функция аналогового корректирующего устройства имеет вид
![]() .
.
Определите дискретную передаточную функцию цифрового алгоритма управления объектом путём преобразования аналогового регулятора в цифровой при периоде квантования сигналов T=0,02с. Проверьте адекватность преобразования по амплитудно-фазовым частотным характеристикам непрерывного и цифрового корректирующих звеньев. Составьте программу работы ЦВМ на основании полученной дискретной передаточной функции и постройте структурную схему реализации алгоритма дискретного корректора.
Решение
Для получения дискретного аналога корректирующего алгоритма в форме обратных разностей используем аппроксимационную формулу Тастина
![]() ,
,
приведём
первый коэффициент знаменателя к 1 и
разделим числитель и знаменатель
дискретной передаточной функции на
![]() :
:

![]() .
.
Из последнего выражения
![]() ,
,
![]() .
.
Обратное Z-преобразование этого выражения – рекуррентная форма дискретного управляющего алгоритма:
![]() .
.
Структурная схема реализации полученного алгоритма в микроЭВМ представлена на рис.1.
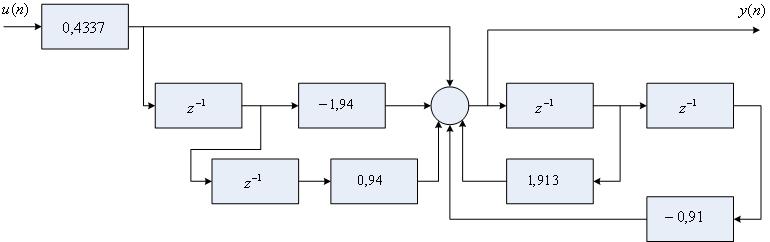
Рис.1. Структурная схема дискретного управляющего алгоритма
syms p syms t syms p
f=1/(p+1); f=t^3; f=1/p;
ilaplace(f) laplace(f) ed=ilaplace(f)
ans= ans= ed=1
exp(-t) 6/p4
syms p alpha syms t
f=1/(alpha + p); diff(heaviside(t),t)
ilaplace(f) laplace(ans)
1/exp(alpha*t) 1
ilaplace(ans)
dirac(t)
num=[6.66 1];
den=[66.6 1];
Wp=tf(num,den)
Ts=0.001;
Wz=c2d(Wp,Ts)
Transfer function:
6.66 s + 1
----------
66.6 s + 1
Transfer function:
0.1 z - 0.09998
---------------
z - 1
Sampling time: 0.001