

1. Цель и состав курсового проекта
Целью выполнения курсового проекта является получение навыков студентами анализа работы судовых механизмов, проверки характеристик безопасности и надежности судовой техники в соответствии с МКУБ.
При выполнении курсового проекта студент должен изучить конструкцию и особенности эксплуатации судовых механизмов, овладеть приемами анализа их работы.
На защиту курсового проекта представляется расчетно – пояснительная записка и графическая часть.
Содержание пояснительной записки:
1. Общее описание привода.
2. Структурный, кинематический и динамический синтез.
2. Подбор и расчет основных узлов.
4. Требования Морского Регистра судоходства по эксплуатации судовых механизмов.
Все расчеты должны сопровождаться расчетными схемами, эпюрами и масштабными компоновками.
При выполнении расчетов на ЭВМ в пояснительной записке должны быть даны алгоритм расчета, схема алгоритма, исходные данные для ввода в машину и результаты счета (в распечатке) и анализ результатов.
Графическая часть:
1. Компоновочный чертеж ( ф. А3).
2. Чертеж общего вида привода (ф. А1).
3. Сборочный чертеж передаточного узла ( ф. А1).
4. Чертежи деталей ( ф. А2).
Предметом изучения являются механические узлы судовых устройств, в том числе приводы судовых механизмов. Типовые характеристики судового привода отражены на примере судовой лебедки, синтез которой представлен в разделе 2 настоящего пособия.
В разделе 3 приведена методика расчета элементов привода.
В разделе 4 представлена методика расчета передач судовых приводов и узлов их обслуживающих.
В разделе 5 приведены основные требования по техническому обслуживанию привода.
Курсовой проект выполняется по заданию, подписанному руководителем и согласованному со студентом, в соответствии с графиком, представленном в задании.
Курсовой проект выполняется в соответствии с единой системой конструктор- ской документации и другими нормативными документами.
2. Состав и условия нагружения электромеханического привода
2.1. Характеристика элементов привода машины
Электромеханический привод машины состоит из узлов, которые условно
можно разделить на категории по характеру их использования:
сообщающие движения;
преобразующие движение;
узлы соединительные (муфты и т.п) и поддерживающие (валы и их опоры);
терминалы или исполнительные органы.
Примеры приводов машин представлены на рисунках: 2.1,а – привод конвейера,
2.1,б – привод грузовой лебедки
а)

1 – электродвигатель;2 – передача клиновидным ремнем;
3 – редуктор; 4 – передача цепью
б)

1 - электродвигатель; 2 - муфта эластичная; 3 – тормоз; 4 – редуктор;
5 – муфта зубчатая; 6 – барабан; 7 – гибкий орган; 8 – крюковая подвеска
Рисунок 2.1 - Схемы типовых приводов машин
В качестве источника энергии для привода чаще всего используются электродвигатели (Рисунок 2.2). Тип двигателя выбирают по требуемой мощности, условиям эксплуатации и режиму работы привода с учетом продолжительности включения.
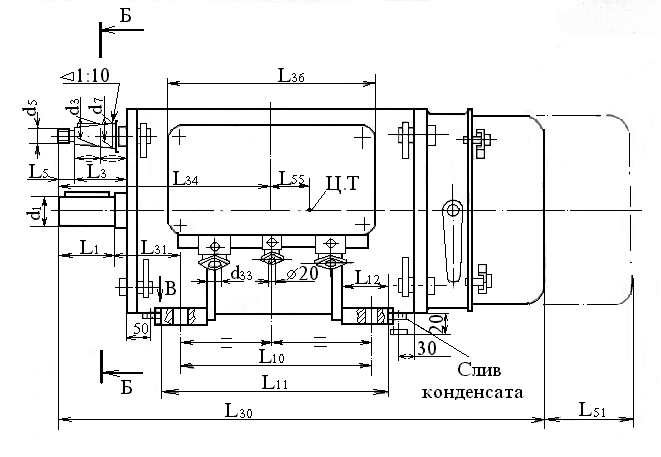
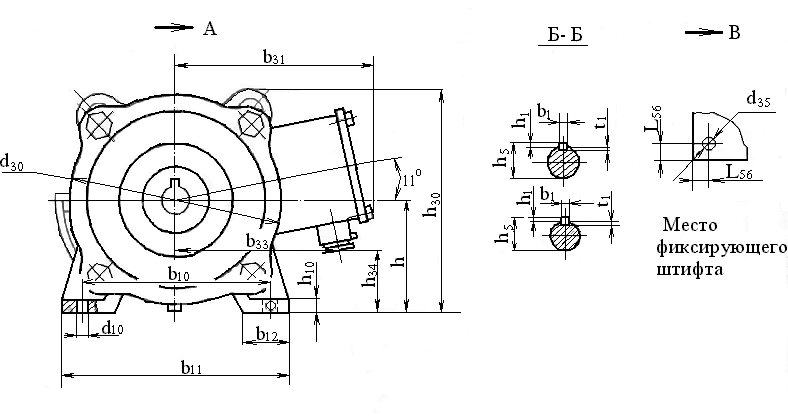
Рисунок 2.2 - Электродвигатель серии МАП
Исполнительная часть механизма может включать в себя гибкий орган, барабан и грузозахват, как в механизме подъема груза (Рисунок 1.1,б ), либо цепную часть конвейера (Рисунок 2.1,а), либо другие исполнительные органы.
В качестве гибких органов применяют стальные, проволочные канаты различных типов. Канаты различают по диаметру, по маркировочной группе (для подъемно – транспортных машин 1372, 1470, 1668, 1666, 1764, 1862, 1960, 2156, 2254, 2352 МПа), по количеству проволок в прядях и количеству прядей в канате, по материалу сердечника (пеньковый, асбестовый, стальной и т.п.) и другим специальным признакам. Подбор каната производят по расчетному разрывному усилию по нормам Госгортехнадзора в зависимости от режима работы механизма.
Для изменения направления и поддержания каната служат блоки. Блоки бывают подвижные и неподвижные. Подвижные блоки, кроме изменения направления каната, обеспечивают получение выигрыша в силе. Система подвижных и неподвижных блоков, огибаемых канатом, образует полиспаст (Рисунок 2.4). Характеристикой полиспаста является его кратность. Полиспасты бывают одинарные и спа-
ренные. Кратность одинарного полиспаста равна числу ветвей каната, воспринимающих нагрузку.
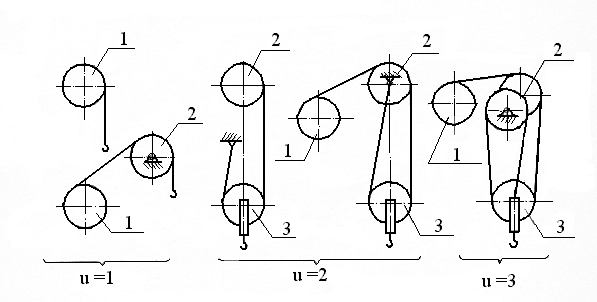
1 – барабан; 2- неподвижный блок; 3- подвижный блок
Рисунок 2.4- Схемы полиспастов с различной кратностью
Для преобразования вращательного движения привода механизма в поступательное движение подъема или опускания груза служат канатные барабаны (Рисунок 2.5).
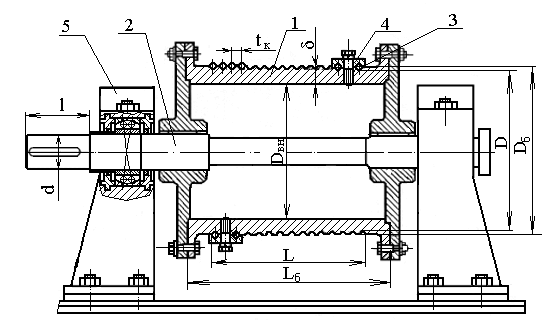
1 – корпус; 2 – вал; 3 – канат; 4 – планка прижимная; 5- опора
Рисунок 2.5- Барабан для однослойной навивки каната
В грузоподъемных машинах общего назначения для захватывания груза служат крюки. При двух и более несущих ветвях применяют крюковые подвески (Рисунок 2.3, Таблица А.6).

1– крюк; 2- блок канатный; 3- ось блока; 4– подшипник блока; 5– подшипник крюка
Рисунок 2.3 - Крюковая подвеска
В приводах производственных машин частота вращения элементов исполнительного органа, как правило, не равна частоте вращения выходного вала двигателя. Для согласования энерго – кинематических параметров «входа – выхода» привода применяют узлы, преобразующие движение, композиция которых определяется передаточной функцией привода.
В случае, когда эта функция направлена на понижение частоты вращения узел называется редуктором (от лат. reductor – отводящий назад, понижающий). Если выходные энерго – кинематические параметры привода не могут быть обеспечены одной передачей, используют необходимое количество сочетаемых передач, которые образуют двух – трех- или многоступенчатыый редуктор.
В приводах машин используют, как стандартные редукторы, так и разработанные индивидуально. В таблицах А.10…А.14 Приложения А представлены типы
и некоторые параметры распространенных редукторов.
В редукторах применяют различные передачи: цилиндрические (прямозубые, с наклонным зубом, шевронные), конические, червячные, планетарные и волновые, а также передачи с гибкой связью (ременные и цепные).
Цилиндрическая зубчатая передача (рисунок 2.6) осуществляет движение между параллельными осями. Колеса, ее образующие, имеют начальные и делительные поверхности в виде цилиндров.
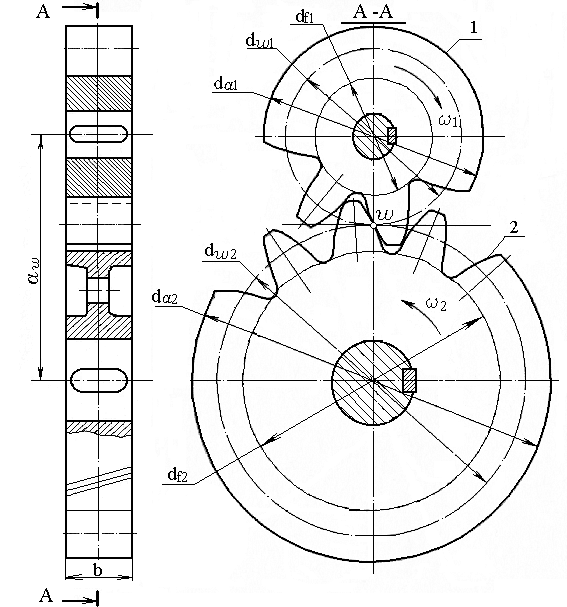
1 – колесо ведущее; 2 – колесо ведомое
Рисунок 2.6 - Передача цилиндрическая
Коническая зубчатая передача (Рисунок 2.7) осуществляет передачу движения между пересекающимися осями. У зубчатых колес конической передачи начальные и делительные поверхности – конусы.

1 – колесо ведущее; 2 – колесо ведомое
Рисунок 2.7 - Передача коническая
Планетарная зубчатая передача (рисунок 2.8) служит для передачи и преобразования вращательного движения и содержит зубчатые колеса с перемещающимися осями вращения. В планетарных передачах сочетаются внешнее (a-g) и внутреннее (g-b) зацепление.

а, b – колеса центральные; h – водило;
g1, g2, g3 – колеса с перемещающимися осями вращения (сателлиты)
Рисунок 2.8 – Передача планетарная
Разновидностью планетарной передачи является волновая зубчатая передача (рисунок 2.9) с одним центральным жестким колесом и сателлитом, выполненным тонкостенным с гибким зубчатым ободом, деформируемым во время работы передачи.
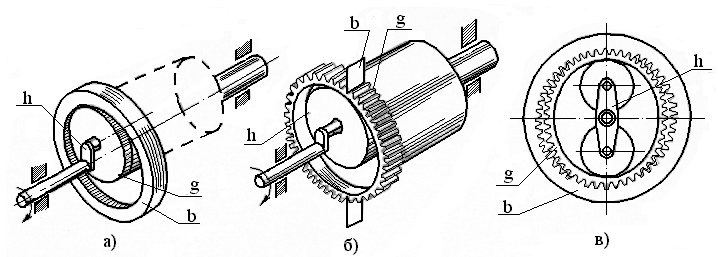
b – колесо центральное; g – сателлит – колесо гибкое зубчатое; h – водило;
а – передача планетарная с одним сателлитом;
б – передача волновая с одной зоной зацепления;
в – передача волновая с двумя зонами зацепления
Рисунок 2.9 - Схема образования волновой передачи
Движение между валами со скрещивающимися осями осуществляется червячной передачей, которая состоит из червяка и червячного колеса (Рисунок 2.10).
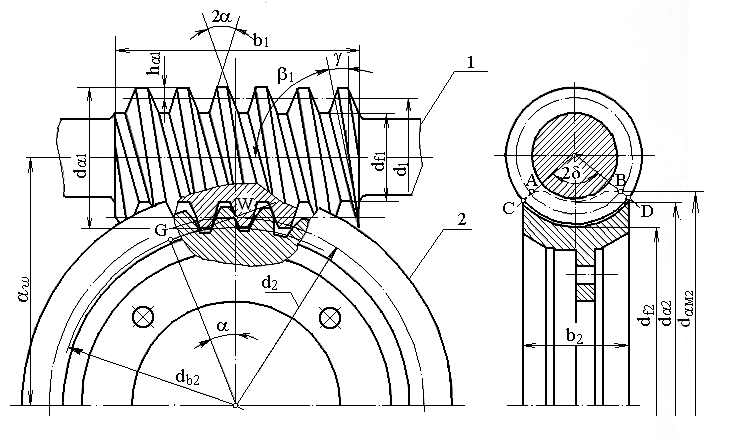
1 – червяк; 2 – колесо червячное
Рисунок 2.10 - Передача червячная
Зацепление червячного колеса подобно зацеплению цилиндрического колеса с рейкой. Для нормальной работы червячного зацепления необходимо соблюдение равенства шагов (расстояний между одноименными точками соседних зубцов) на делительном диаметре в осевой плоскости червяка и делительном окружном диаметре колеса.
Червячные передачи дают возможность получения большого передаточного отношения в одноступенчатой передаче, плавность и бесшумность работы и возможность самоторможения. Различают передачи с цилиндрическими (делительная поверхность червяка – цилиндрическая) и глобоидными (делительная поверхность червяка является частью вогнутой поверхности тора) червяками.
При передаче движения червячное колесо вступает в зацепление с витками червяка, расположенными на его поверхности вращения. Угол наклона зуба червячного колеса равен углу подъема линии витка червяка.
Ременная (Рисунок 2.11) и цепная (Рисунок 2.12) передачи – это передачи с гибкой промежуточной связью. Эти передачи применяются при необходимости сообщить движения между валами, находящимися на некотором расстоянии друг от друга. В качестве гибкой связи выступает ремень или цепь.
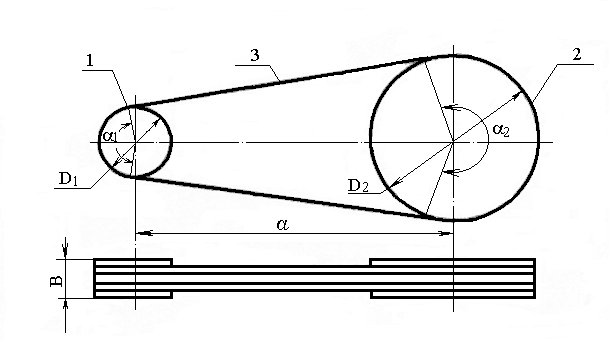
1 – шкив ведущий; 2 – шкив ведомый; 3 - ремень
Рисунок 2.11 - Передача ременная
Передающие движение элементы (колеса, звездочки, шкивы) устанавливаются на валах с определенной посадкой с использованием дополнительных связей в виде шпонок и других элементов.

1 – звездочка ведущая; 2 - звездочка ведомая; 3 - цепь
Рисунок 2.12 - Передача цепная
Опоры валов (Рисунок 2.13) служат для их поддержания и обеспечения стабильной работы передачи. Подшипник – часть опоры вала, который обеспечивает перемещение вала в опоре.

1 – вал шестерни; 2 – колесо; 3 – шпонка; 4 – подшипник; 5 – крышка подшипника
Рисунок 2.13 - Вал с опорами.
На практике встречаются комбинированные системы, в которых объединены сразу несколько функций: мотор – редуктор, редуктор – барабан и т.п.
Узлы, комплектующие машину, соединяются между собой с помощью специальных устройств (муфт и т.п.).
Приводные муфты передают вращательное движение и крутящий момент с одного вала на другой, расположенный соосно, или с вала на установленную на нем деталь. С помощью муфт решается кинематическая и силовая задача, а также ряд монтажных и эксплуатационных аспектов. Муфты бывают глухие, компенсирующие предельные и управляемые.
На рисунке 2.15 изображена компенсирующая упругая втулочно – пальцевая муфта (МУВП), на которую может устанавливаться тормоз (размеры ВТ и DT соответствуют внутренним размерам тормозных колодок). Она, как правило, устанавливается в приводе между электродвигателем и редуктором и демпфирует динамические нагрузки. Полумуфта под тормоз располагается со стороны редуктора.

Рисунок 2.15 - Муфта упругая втулочно – пальцевая
На рисунке 2.16 изображена зубчатая муфта, которая устанавливается между редуктором и барабаном и компенсируют угловые отклонения валов под нагрузкой. При необходимости установления на ней тормоза, полумуфта, расположенная со стороны исполнительного органа выполняется по размерам тормозного шкива.

Рисунок 2.16 - Муфта зубчатая
Для остановки и пуска механизма служат тормоза ( Таблица А.21, А.22). В машинах часто применяют тормоза, пристроенные к двигателю. В приводе возможна установка двух тормозов.
В приводах используются тормоза колодочные (рисунок 2.17), ленточные, дисковые, конические. По направлению действия усилий нажатия на тормозной элемент они бывают с радиальным и осевым замыканием по источнику замыкающей силы – ручные, пружинные, грузовые и гидравлические, а по характеру действия приводного усилия – закрытого типа (постоянно замкнуты внешней силой и размыкаются во время работы механизма), открытого типа (замыкаются для остановки механизма) и комбинированные (в нормальных условиях работают как открытого типа, в аварийных – закрытого). Тормоза бывают автоматические и управляемые.

1,2 - тормозные колодки; 3,4 – рычаги; 5- пружина
Рисунок 2.17 - Схема колодочного тормоза
Правила эксплуатации машин и механизмов определяются требованиями Госгортехнадзора. Они обязательны для предприятий всех министерств и ведомств. В Правилах даны указания по вопросам, относящимся к технической эксплуатации и ремонту механизмов: организация надзора и обслуживания, порядок регистрации; разрешение на пуск в работу; технические освидетельствования; разрешение на изготовление и ремонт; материалы и сварка.
Технические освидетельствования, предусматриваемые Правилами, делятся на полное, включающее дефектоскопию, статическое и динамическое испытания, и частичное, проводимое без испытаний.
Полному техническому освидетельствованию подвергают вновь установленные механизмы, находящиеся в эксплуатации (не реже одного раза в 3 года), а также механизмы после переноса их на новое место работы, реконструкции и некоторых
ремонтных работ. Частичное освидетельствование предусматривают не реже одного раза в 12 мес.
Правила предусматривают три вида освидетельствований: первоначальное, периодические и внеочередные.
Первоначальное освидетельствование сопровождается испытанием и полным освидетельствованием механизмов.
Периодические испытания проводят не реже чем один раз в пять лет.
Внеочередные освидетельствования и испытания производят после замены, переоборудования или ремонта механизмов или их деталей, а также после аварий.
Механизм сначала испытывают пробной нагрузкой при статическом режиме. Затем производят испытания пробной нагрузкой при работе механизмов с полными скоростями и предусмотренным совмещением движений. Одновременно проверяют действие тормозов и концевых выключателей.
Статические испытания судовых механизмов ведутся с нагрузкой, превышающей ее номинальное значение на 25 %. Динамические испытания механизмов производят нагрузкой, превышающей на 10 % номинальное значение.