

3.3.5. Блок люфта.
В пакете Simulink нелинейность «насыщение» представлена блокомDiscontinuities/Backlash.
Назначение:
Моделирует нелинейность типа “люфт”.
Параметры:
Deaband width – Ширина люфта.
Initial output – Начальное значение выходного сигнала.
Сигнал на выходе будет равен заданному значению Initial output, пока входной сигнал при возрастании не достигнет значения (Deaband width)/2 (где U – входной сигнал), после чего выходной сигнал будет равен U-(Deaband width)/2. После того как, произойдет смена направления изменения входного сигнала, он будет оставаться неизменным, пока входной сигнал не изменится на величину (Deaband width)/2, после чего выходной сигнал будет равен U+(Deaband width)/2.
На рис. 3.15 показан пример работы блока Backlash. Входной сигнал блока гармонический с линейно возрастающей амплитудой.
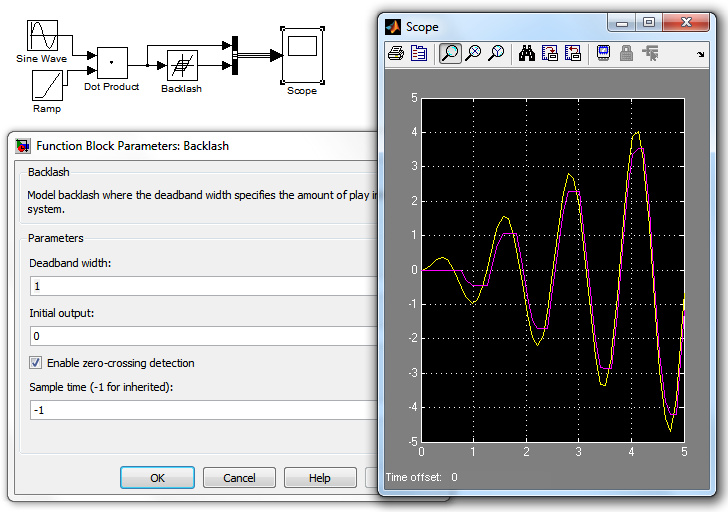
Рис.3.15. Пример работы нелинейности типа «Люфт».
3.4. Неаналитические нелинейности.
Неаналитические нелинейности - такие, что не могут быть описанные аналитическими выражениями, либо заданные таблицами и графиками.
К этой группе относятся нелинейности, обусловленные кривыми намагничивания, вольт-амперными характеристиками нелинейных сопротивлений и т.п.
Рис.3.16. Нормированная кривая намагничивания
Типичным, широко распространенным примером такой нелинейности является кривая намагничивания (рис.3.16.). Начальный участок - это практически прямая линия, дальше – насыщающаяся кривая.
Существует два основных метода моделирования таких нелинейностей: интерполяция и аппроксимация.
3.4.1. Интерполяция нелинейностей.
Довольно часто на практике встречаются случаи, когда функция задана не аналитически, а в виде таблицы. В процессе моделирования нужно находить значения функции в точках, которые принадлежат интервалу задачи, но не совпадают с приведенными в таблице.
В этих случаях применяется особый прием построения приближенной функции, близкой к исходной, и определения аналитического выражения, которым можно воспользоваться для приближенных вычислений.
Рассмотрим
основные подходы, которые применяются
на практике. Пусть известные значения
некоторой функции
 образовывают такую таблицу 3.1.:
образовывают такую таблицу 3.1.:
Таблица 3.1.
Значение функции



Классический
подход к решению задачи нахождения
приближенной функции основывается на
требовании совпадения значений функции
и приближенной функции
 в точках
в точках (
( ), то есть выполнение равенств
), то есть выполнение равенств

В этом случае
процедуру нахождения приближенной
функции называют интерполяцией, а
точки -
узлами интерполяции.
-
узлами интерполяции.
Удобнее всего искать интерполирующую функцию в виде многочлена, поскольку его значение легко вычислить за конечным числом шагов, интегрировать, дифференцировать, используя лишь основные арифметические операции добавления, отнимание и умножение.
Перечислим основные методы построения интерполяционных полиномов:
метод Лагранжа;
разностная схема Ньютона;
кусочная интерполяция кубическими полиномами;
кубические многочлены Эрмита;
кубические многочлены Бесселя;
интерполяция кубическими сплайнами;
интерполяция тригонометрическими полиномами.