

27. Принцип формирования размерности механической величины. Размерности единиц измерения: «Ньютон», «Ватт», «Паскаль». Размерности механических величин: «работа», «момент», «момент инерции».
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Момент силы имеет размерность сила на расстояние, и в системе СИ единицей момента силы является «ньютон-метр». Джоуль, единица СИ для энергии и работы, тоже определяется как 1Н*м, но эта единица не используется для момента силы. Когда энергия представляется как результат «сила на расстояние», энергия скалярная, тогда как момент силы — это «сила, векторно умноженная на расстояние» и таким образом она (псевдо) векторная величина. Конечно, совпадение размерности этих величин не простое совпадение; момент силы 1Н*м, приложенный через целый оборот, требует энергии как раз 2*π джоулей.
№28 Причины возникновения упругих колебаний в циклических механизмах. Учёт упругих колебаний при выборе ЗПД.
В общем циклический механизм – это механизм, который совершает движение, повторяющееся через какой-нибудь период (цикл)
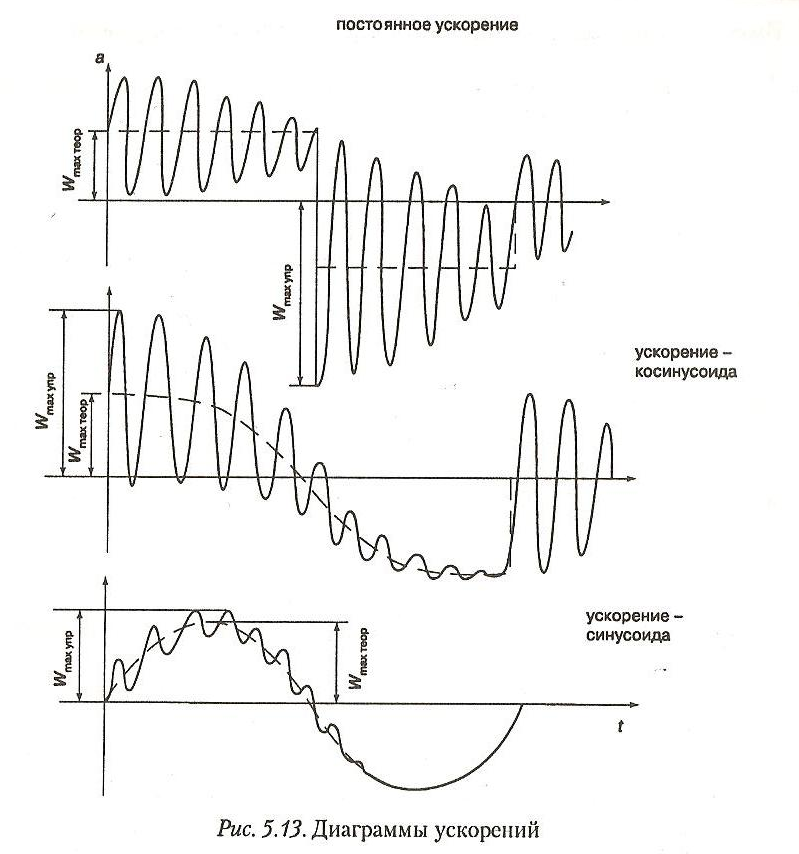
«Виновниками» возникновения вынужденных колебаний являются ускорения!!!
Если функция ускорения в каких-то точках имеет разрывы, то в момент разрыва функции возникают пиковые инерционные нагрузки, которые, изменяясь периодически, вызывают в механизме упругие колебания. Таким образом, действительное перемещение, скорости и ускорения звеньев механизма представляют собой сложное колебательное движение — наложение свободных и вынужденных колебаний.
На рис. 5.13 представлены диаграммы ускорений с учетом этих явлений.
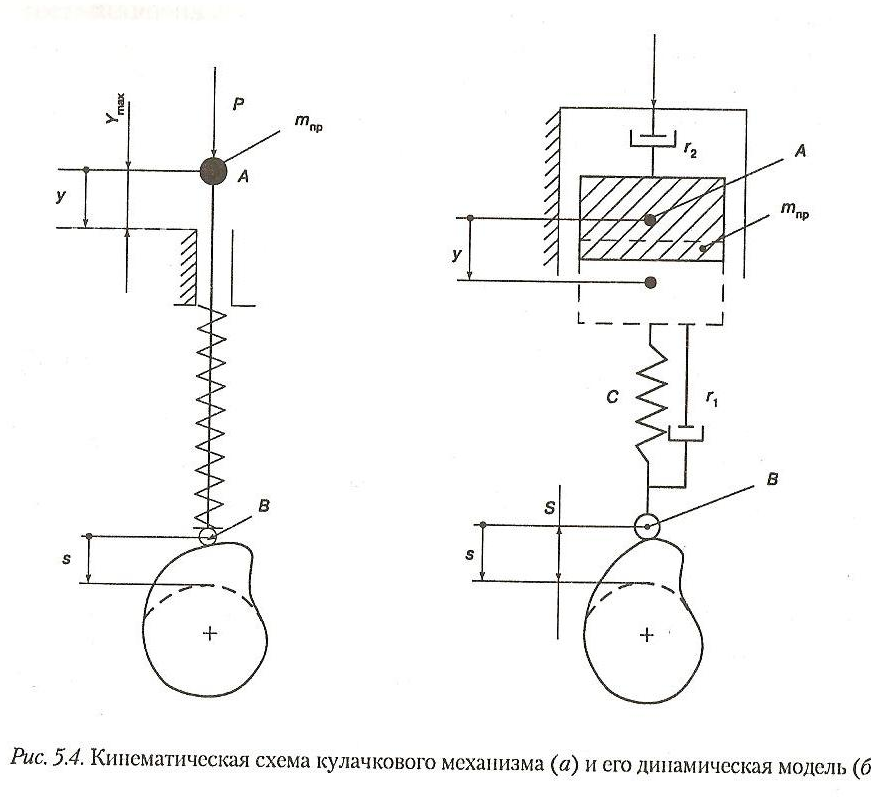
На примере кулачкового механизма:
Учесть влияние упругих колебаний на величину ускорения, спровоцированного функцией ЗПД, можно с помощью коэффициента «пульсаций»:
![]()
где у — координата приведенной массы;
S — координата S(t) профиля кулачка (см. рис. 5.4).
Сам пульс — ускорение второго рода — является производной от теоретической функции ускорения:
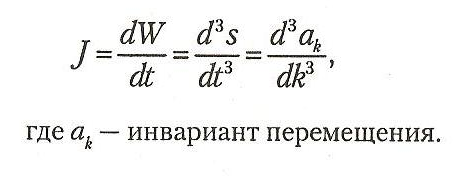
Критерием выбора ЗПД в этом случае является константа пика ускорения С. Чем меньше С, тем меньше пик ускорения и, следовательно, минимально возможная инерционная сила.
На рис. 5.14 показаны примеры функции J(k)
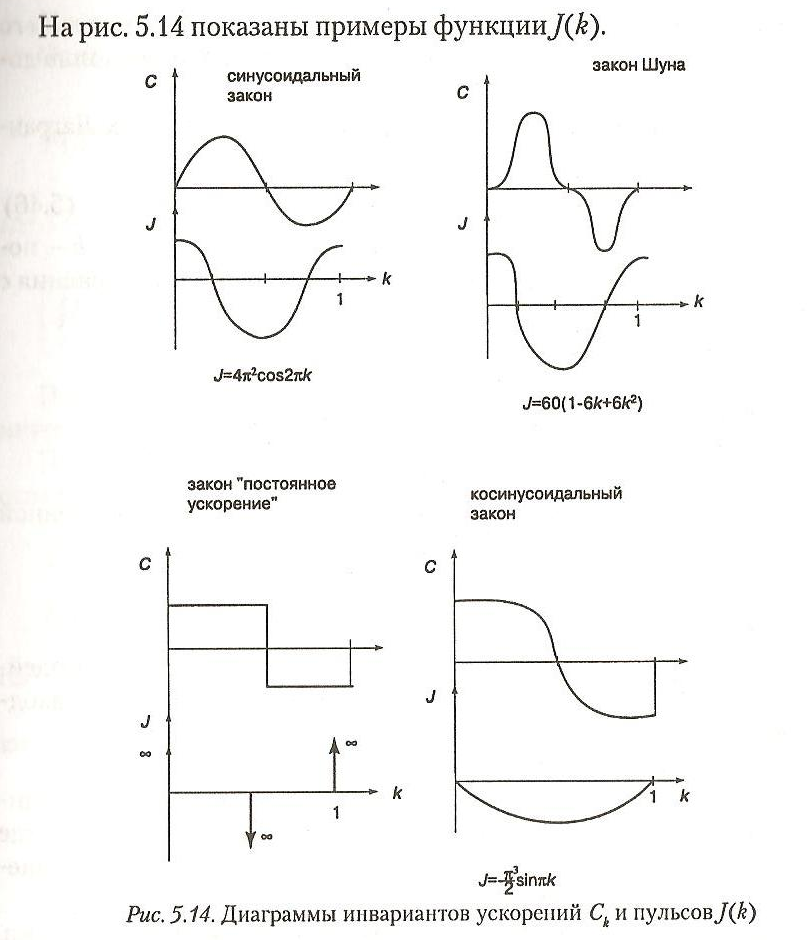
Коэффициент пульсации К. является также качественной характеристикой ЗПД, как и константы пиков механических величин В, С, D.. Но его физический смысл — отношение частот свободных и вынужденных колебаний. Для каждого закона Кj, определяется путем решения дифференциального уравнения движения массы, приведенной к какой-либо точке звена. В этом случае необходимо иметь конкретную динамическую модель механизма.
Более универсальным является операторный метод решения дифференциальных уравнений, хотя он значительно менее известен как удобный метод для решения задач механики.
29 Расчёт периода рабочего цикла многопозиционной машины. Виды скм многопозиционных машин. Основные принципы определения Тр, исходя из свойств многопозиционной скм.
Понятие СКМ
СКМ машины определяет основные её функциональные части (позиции), их технологическое назначение и взаимосвязи между ними.
СКМ ПМ — совокупность схематических элементов, связь между которыми обуславливается последовательностью выполнения операций в технологическом процессе.
Основной элемент структуры машины — одна позиция, в которой происходит одна или несколько технологических операций, включая операции ввода и вывода объекта обработки.
На рис 3.2 представлено три элемента, на базе которых строятся абсолютно все варианты СКМ полиграфических машин. Стрелки моделируют движение полуфабриката — направление операций ввода и вывода объекта обработки в данной позиции. Прямоугольник — сама технологическая позиция. Буквенные символы — технологические операции. В прямоугольник вписывается столько символов, сколько операций выполняется в данной позиции. Очередность букв в алфавите символизирует очередность выполнения операций, например операция «В» не может произойти раньше операции «Б».
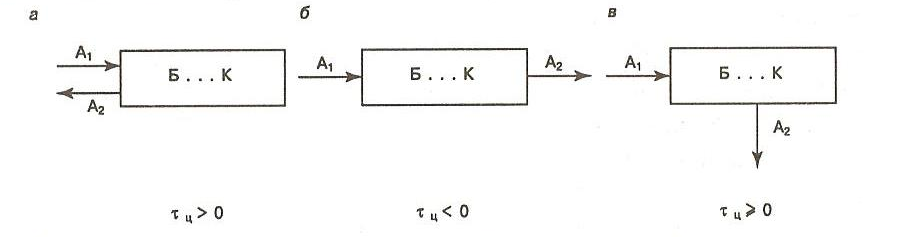
Рис. 3.2. Элементы структурно-компоновочной модели полиграфических машин
Период рабочего цикла многопозиционной машины определяется периодом рабочего цикла наиболее загруженной позиции:
![]()
Пример. В машине 5 позиций. Каждая срабатывает по 1 разу.
![]()
Тр1 = 9с.;Тр2=11с.;Тр3 = 8с-;Тр4=10с.;Тр5 = 12с.
Чему равен период рабочего цикла машины Тр = ?
Тр = Тр, = 12с.
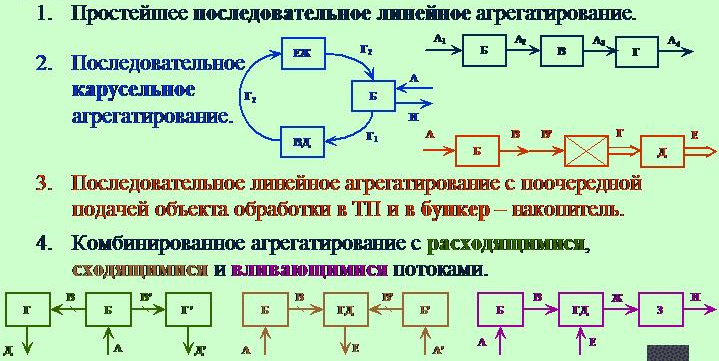
Виды СКМ:
Основной принцип определения Тр
Из определения рабочего цикла, период рабочего цикла i-ой позиции выражается как
![]()
где
q — число технологических операции, выполняемых в позиции;
tj—время выполнения j-ой технологической операции (мин);
![]() j
- интервал или перекрытие по времени
между см* технологическими операциями;
j
- интервал или перекрытие по времени
между см* технологическими операциями;
ц - интервал или перекрытие между смежными исполнительными процессами, происходящими в данной позиции, другими словами: время между окончанием операции вывода полуфабриката из позиции и началом ввода следующего объекта в эту позицию.
Пару слов о том что такое многопозиционные машины, просто сам только что узнал.
В общем смотрите: если в СКМ один прямоугольник, то это однопозиционная машина (например позолотный пресс), а если несколько-то многопозиционная (например ВШРА)