

Контрольные вопросы по материалу лекции
1. Назначение корабельного артиллерийского комплекса АК-630М/МР-123.
2. Состав корабельного артиллерийского комплекса АК-630М/МР-123.
3. Тактические характеристики артиллерийского комплекса АК-630М/МР-123.
4. Размещение артиллерийского комплекса АК-630М/МР-123 на кораблях ВМС.
5. Назначение и решаемые задачи системы управления стрельбой МР-123.
6. Технические характеристики системы управления стрельбой МР-123.
7. Приборный состав системы управления стрельбой МР-123.
Лекція 12. Способи управління стрільбою і режими роботи корабельної системи управління МР-123.
1. Способи управління стрільбою корабельним артилерійським комплексом.
2. Режими роботи системи управління МР-123.
Кількість годин: 2 години.
Рекомендована література:
- Система управления МР-123. Техническое описание. Книга 1. – М.: МО СССР. Воениздат. 1980.
- Вернидуб М.Д. и др. Приборы управлення стрельбою корабельной артиллерией/ М.Д. Вернидуб. - М.: Воениздат МО СССР. 1976.
- Филатов А.М., Швец Л.К. Приборы управления стрельбой корабельной автоматической артиллерии./А.М. Филатов. – Севастополь.: ЧВВМУ. 1985г.
Упрощенная функциональная схема корабельного артиллерийского комплекса АК-630М/МР-123 представлена на рисунке 1.
Для решения задач, стоящих перед корабельной системой управления стрельбой МР-123, в её состав входят следующие функциональные устройства:
передающее устройство (ПРДУ);
устройство синхронизации (синхронизатор);
антенный переключатель;
антенно-волноводное устройство (АВУ);
приемное устройство (ПРМУ);
индикаторные устройства (ИУ):
- индикатор кругового обзора и сопровождения (ИКОС);
- индикатор отклонений (ИО);
устройство выделения сигнала ошибки по угловым координатам (ВСОук);
устройство управления приводом наведения антенны по курсовому углу (УУАКУ);
устройство управления приводом антенны по углу места (УУАУМ);
привод наведения антенны по курсовому углу;
привод наведения антенны по углу места;
устройство стабилизации антенного поста по бортовой и килевой качкам;
привода стабилизации антенного поста по бортовой и килевой качке;
устройство измерения дальности цели – дальномер цели;
устройство перехвата и сопровождения ракеты;
счетно-решающее устройство (СРУ);
телевизионно-оптическое устройство (ТОУ);
имитатор-тренажер (ИТ);
система автоматизированного контроля работоспособности системы управления (САК);
визирная колонка (ВК);
устройство электропитания системы управления;
Общий принцип работы системы управления МР-123.
Синхронизатор вырабатывает через равные промежутки времени импульсы запуска τзи, которые поступают на передающее устройство, и импульсы, обеспечивающие работу других устройств системы управления: индикаторных устройств, устройств сопровождения, имитатора-тренажера.
С приходом каждого запускающего импульса передающее устройство генерирует СВЧ-импульсы. Передающее устройство состоит из двух передатчиков – двух передающих каналов, которые настраиваются на частоты f1 и f2 в пределах 3-х сантиметрового диапазона, однако, на излучение может работать только один передающий канал.
С передающего устройства СВЧ-импульс поступает через антенный переключатель в антенно-волноводное устройство. АВУ обеспечивает формирование и остронаправленное излучение энергии в пространство.
Система управления работает в пяти основных режимах:
- поиск целей;
- прием целеуказания от корабельных систем ЦУ;
- захват выбранной цели для сопровождения;
- сопровождение цели;
- стрельба.
В режиме автоматического «Поиска» антенна в горизонтальной плоскости осуществляет круговое вращение со скоростью 90 град/с, а в вертикальной плоскости луч антенны поочередно занимает 5 положений по углу места в «Нижней зоне» от 0 до 18 град или «Верхней зоне» от 18 до 36 град. Переключения луча осуществляется автоматически после каждого оборота антенны.
При обзоре пространства в режиме «Поиск» отраженные сигналы от целей, вошедших в зону действия станции, принимаются антенной и через антенный переключатель поступают в приемное устройство.
Приемное устройство обеспечивает усиление принятых сигналов и преобразование к виду, необходимому для работы оконечных устройств: индикаторных устройств, устройств сопровождения цели по угловым координатам (КУ, УМ) и дальности (Д).
В режиме «Поиск» видеосигналы целей с приемного устройства поступают на индикатор кругового обзора и сопровождения (ИКОС) и высвечиваются на экране в виде электронных отметок.
Боевой расчет системы управления по экрану ИКОС оценивает обстановку, выявляет опасную цель и принимает решение о захвате на сопровождение.
Для перехода в режим сопровождения цели (слежения антенной за целью) необходимо остановить вращение антенны и переключение лучей, выйти из режима поиска
Первоначально останавливается переключение лучей по УМ в том положении, при котором цель лучше наблюдается на экране ИКОС. Далее по экрану ИКОС операторы вручную штурвалом УКУ наводят электронный визир КУ-Д на цель и штурвалом УД загоняют цель в строб дальности 1 км и включают режим «Захват».
При точном захвате цели (цель находится в диаграмме направленности и в стробе дальности) операторы переводят систему управления в режим «Сопровождения». Если захват цели не произошел осуществляется допоиск цели по КУ и УМ или повторный поиск цели.
В режиме «Сопровождение» антенна осуществляется автоматическое слежение за целью антенной по угловым координатам и по дальности. В этом режиме отраженный сигналы от цели с приемного устройства также поступают в устройство выделения сигнала ошибки (ВСОУК) сопровождения по углам и в устройство сопровождения цели по дальности (СИД). Устройство ВСОУК обеспечивает выделения из сигнала от цели суммарного сигнала ошибки сопровождения цели по КУ и УМ. С ВСО сигнал ошибки поступает в системы управления антенной по КУ и УМ, где формируется сигнал управления приводами антенны по КУ и УМ, обеспечивая автоматическое слежение антенны за целью. С датчиков антенны текущие угловые координаты цели КУц и УМц поступают в счетно-решающее устройство (СРУ).
Устройство измерение дальности обеспечивает автоматическое сопровождение цели по дальности и текущее значение дальности до цели поступает в СРУ.
СРУ, используя текущие координаты цели, определяет координаты упрежденной точки цели за время полета снаряда, в эти координаты вносятся метеорологические и баллистические поправки (на скорость и направление ветра, на изменение начальной скорости снаряда), и рассчитываются полные углы наведения ствола АУ в упрежденную точку цели с учетом углов бортовой и килевой качки (ПУГН и ПУВН).
С счетно-решающего устройства углы наведения ПУГН и ПУВН поступают на силовые привода наведения АУ по ГН и ВН и ствол разворачивается в упрежденную точку цели и отслеживает ее.
С приходом цели в зону стрельбы управляющий огнем нажимает на педаль замыкателя цепи стрельбы. АУ дает очередь снарядов. Длина очереди зависит от установленного режима: короткая очередь, длинная очередь, программа.
По индикаторам ИКОС, индикатору отклонений (ИО) и телевизионному индикатору (ТИ) оцениваются результаты стрельбы: поражение, промах. При наличии ошибок стрельбы определяются значения поправок в т.д., и корректуры вводятся вручную в «Целик» и в «Угол прицеливания» штурвалами КЦ и КУП. Стрельба повторяется до поражения цели.
Аппаратура автоматизированного контроля обеспечивает автоматический контроль работоспособности системы управления. Имитатор-тренажер обеспечивает тренировку личного состава, стрельбу по имитированной цели, эксплуатационный контроль работоспособности некоторых устройств системы управления.
При неисправности радиолокационного канала или его подавлении помехами система управления обеспечивает дистанционное управление стрельбой от телевизионного оптического устройства (ТОУ) или от визирной колонки (ВК).
Корабельные системы, обеспечивающие работу системы управления МР-123.
Работу системы управления обеспечивают общекорабельные системы и приборы:
- корабельная система электропитания - обеспечивает первичным силовым питанием 3-ф 50Гц 380 В и управляющим напряжением =27В;
- гирокомпас (ГК) – измеритель курса корабля – значение курса корабля используется для ориентации радиолокационной картинки на индикаторе кругового обзора;
- ЛАГ – измеритель скорости корабля - значение скорости используется для решении задачи встречи снаряда с целью в СРП;
- система центральной гиростабилизации (ГАГ – гироазимутгоризонт) – гироскопический измеритель углов бортовой и килевой качки корабля. Данные углов качек используются для стабилизации антенного поста и для преобразования углов наведения АУ.
- корабельная радиолокационная станция обнаружения воздушных и надводных целей (РЛСовнц) - обеспечивает трансляцию радиолокационной обстановки в масштабе 45 км на ИКОС в режиме совместной работы и выдачу электронного целеуказания (целепоказа) по двум координатам: КУ и Д;
- корабельные приборы целеуказания - обеспечивают выдачу силового целеуказания по трем координатам: КУ, УМ, Д;
- аппаратура государственного опознавания. На кораблях, где отсутствует корабельная РЛС обнаружения, предусматривается сопряжение системы управления МР-123 с аппаратурой опознавания;
- система вентиляции высокочастотных блоков передающего и приемного устройств;
- вентиляция центрального поста.
Система управления при работе может сопрягаться с общекорабельными системами:
- аппаратурой государственного опознавания типа «Пароль»;
- системой электромагнитной совместимости типа «Звездочка», которая обеспечивает подавление взаимных помех радиолокационным станциям работающим в одном диапазоне волн;
- системой типа «Блокировка», которая обеспечивает блокировку (разрыв) цепи стрельбы артиллерийских установок при выполнении стрельбы приоритетным комплексом оружия (ЗРК).
Характеристика функциональных элементов системы управления МР-123.
Передающее устройство (ПРДУ).
Передающее устройство обеспечивает генерирование мощных кратковременных импульсов сверхвысокой частоты (СВЧ) и передачу их через антенный переключатель в антенно-волноводное устройство.
Особенность передающее устройство СУ МР-123 в том, что оно состоит из двух одинаковых по конструкции передатчиков (каналов). Передатчики каналов могут быть настроены на 2 разные несущие частоты f1 и f2 в пределах 3-х сантиметрового диапазона. На излучение может работать только один передающий канал: либо первый передатчик на частоте f1 либо второй на частоте f2. Наличие двух передающих каналов позволяет повысить помехозащищенность и надежность системы управления.
Передатчики конструктивно построены по однокаскадной схеме и в состав каждого входят: подмодулятор, модулятор, магнетронный генератор. Генерирование импульсов СВЧ передающими каналами производится через определенные промежутки времени в соответствии с поступлением импульсов запуска τим из синхронизатора.
Включение передающего устройства на излучение, настройка и смена излучающего канала осуществляется дистанционно с панели УПП центрального прибора 3 (рис. 2).
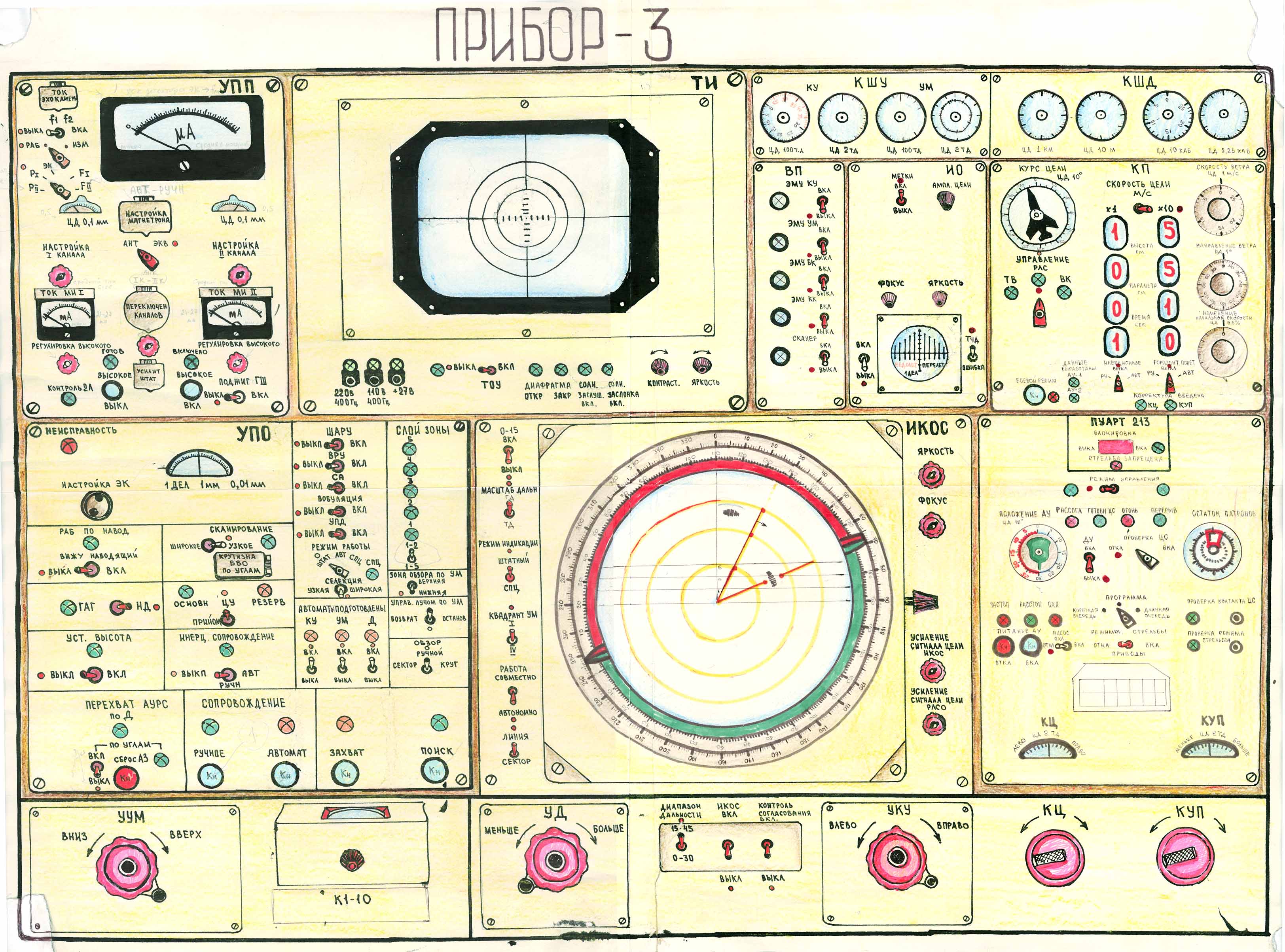
Рисунок 2 – Внешний вид панели УПП (управление приемо-передающим устройством)
Устройство синхронизации (синхронизатор) обеспечивает формирование ряда сигналов, привязывающих (синхронизирующих) работу различных устройств системы управления (передающего устройства, индикаторных устройств, имитатора-тренажера) к единому началу отсчета времени. Синхронизатор также обеспечивает сопряжение системы управления МР-123 с корабельными системами радиотехнической разведки (РТР), радиопротиводействия, опознавания и защиты от взаимных помех. Дискретность сигналов задается кварцевым автогенератором и равна периоду Т = 6,67 мкс синусоидального колебания с частотой f = 150 кГц.
Антенный переключатель обеспечивает независимую работу (развязку) передающего и приемного устройства. Конструктивно он выполнен в виде ферритового циркулятора.
Антенно-волноводное устройство (АВУ).
Внешний вид антенно-волноводного устройства представлен на рисунке 3.
Антенно-волноводное устройство обеспечивает остронаправленное излучение высокочастотных импульсов, поступающих с передающего устройства и прием отраженных от цели сигналов.


Рисунок 3 – Общий вид антенно-волноводного устройства
Конструкция антенно-волноводного устройства СУ МР-123 имеет свои особенности:
- АВУ выполнено двухзеркальным с поворотом плоскости поляризации, что позволяет повысить помехозащищенность станции.
- в режиме «Поиск» на выходе антенны формируется луч с шириной диаграммы направленности 20, продольная ось которого описывает в пространстве поверхность кругового конуса с шириной 30 («Широкий конус») (рис. 4).
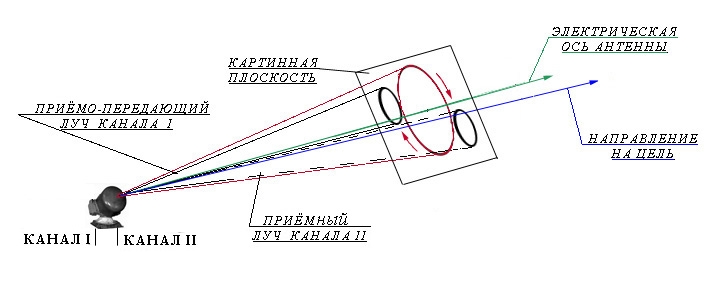
Рисунок 4 - Схема формирования кругового конуса сканирования
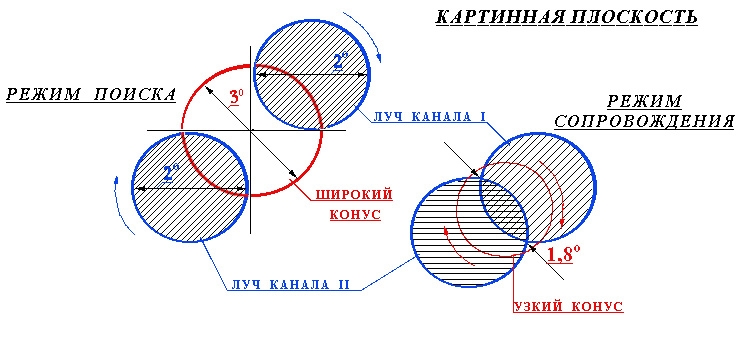
Рисунок 5 - Схема формирования «Широкого конуса» в режиме «Поиск» и «Узкого конуса» в режиме «Сопровождение»
Скорость вращения оси луча 32Гц. Формирование сканирующего по конусу луча обеспечивается моноконическим излучателем (МКИ) с использованием волн высокого порядка.
- в режиме «Сопровождение» на выходе антенны формируется луч с шириной диаграммы направленности 20, продольная ось которого описывает в пространстве поверхность кругового конуса с шириной 1,80 («Узкий конус») (рис. 5).
При входе цели в зону обзора РЛС высокочастотные сигналы отражаются от цели и принимаются антенной. В МКИ антенны отраженный сигнал раскладывается на сигнал основного и сигнал дополнительного канала. Сигналы отличаются между собой только фазой на 1800. Использование основного и дополнительного сигнала необходимо для осуществления защиты станции от уводящих помех по угловым координатам. Защита выполняется с помощью операции нормирования сигнала в блоках выделения сигналов ошибок (БВО).
С антенны сигналы основного и дополнительного каналов через антенный переключатель подаются в приемное устройство (ПРМУ).
Приемное устройство (ПРМУ).
Приемное устройство обеспечивает усиление принятых высокочастотных сигналов, отраженных от цели; преобразование их в сигналы промежуточной частоты и усиление на этой частоте, преобразование этих сигналов в видеосигналы и усиление их до уровня, необходимого для работы оконечных устройств радиолокационной станции: индикаторных устройств и устройств автоматического сопровождения цели по дальности и угловым координатам.
Приемное устройство системы управления МР-123 является устройством супергетеродинного типа, построенным по двухканальной схеме. Конструкция приемного устройства обеспечивает обработку сигналов основного и дополнительного каналов, приходящих на несущей частоте fн1 передатчика первого канала либо на несущей частоте fн2 передатчика второго канала, без механической перестройки приемного устройства с частоты на частоту.
После обработки в приемном устройстве видеосигналы от целей поступают на выходные устройства:
- индикаторные устройства:
- индикатор кругового обзора и сопровождения (ИКОС);
- индикатор отклонений (ИО).
- устройство выделения сигнала ошибки сопровождения цели по угловым координатам;
- устройство сопровождения цели по дальности.
Индикаторные устройства конструктивно размещены на центральном приборе 3 системы управления (рис. 6).
Индикатор кругового обзора и сопровождения (ИКОС).
Общий вид блока индикатор кругового обзора и сопровождения представлен на рисунке 7. ИКОС предназначен:
- в режиме «Грубая дальность» (ГД) - для визуального самостоятельного или совместного с корабельной РЛСовнц поиска и обнаружения целей, наблюдения за ними, определения их грубых координат и тактических намерений, приема и уточнения данных целеуказания, захвата выбранной цели, ручного сопровождения или контроля автоматического сопровождения выбранной цели по трем координатам;
- в режиме «Точная дальность» (ТД) – для контроля точности сопровождения цели РЛС по трем координатам, наблюдения прохождения трасс снарядов при стрельбе, оценки результатов стрельбы и грубого определения ошибок стрельбы.

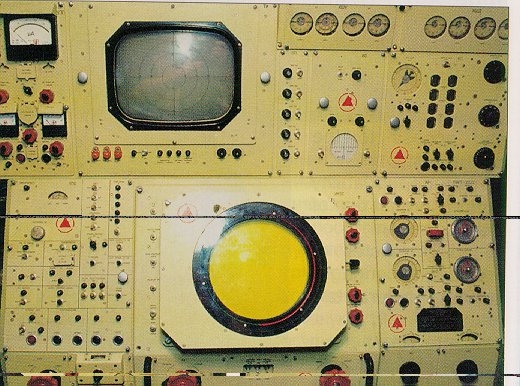
Рисунок 7 – Индикатор кругового обора и сопровождения (ИКОС)
ИКОС имеет три диапазона дальности: 0-15 км, 0-30 км, 15-45 км. В процессе работы обеспечиваются три варианта индикации информации в зависимости от режима работы системы управления: «Поиск», «Сопровождение - Грубая дальность», «Сопровождение - Точная дальность».
Индикатор отклонений (ИО).
Внешний вид панели индикатора отклонений представлен на рисунке 8. Индикатор отклонений предназначен для:
- контроля точности сопровождения цели РЛС в режиме работы «Ошибка»;
- для определения ошибок стрельбы по дальности в режиме работы «Точная дальность» (ТД).
Рисунок 8 – Панель индикатора отклонений (ИО)
Устройство сопровождения цели по дальности (Дальномер).
С приемного устройства видеосигналы сигналы цели поступают на устройство сопровождения цели по дальности – дальномер цели. Дальномер обеспечивает сопровождение цели по дальности и определение текущей дальности до цели (Дц). Измерение дальности осуществляется импульсным методом, при котором регистрируются два момента времени: момент излучения и момент возвращения отраженного сигнала.
τ = 2Дц/с (мкс); (1)
где с = 3*108 м/с – скорость света
отсюда:
Дц = τ*с/2 (м); (2)
Запаздыванию τ = 1 мкс соответствует дальность Д = 150м.
Автоматическое сопровождение по дальности осуществляется системой АСД с регулируемой цепью задержки.
Текущее значение дальности до цели Дц подается в счетно-решающее устройство, а также выводится на шкалы контроля дальности (КШД), расположенные на приборе 3 (рис. 9).
На панели КШД имеется две пары шкал дальности: шкалы грубого и точного отсчета дальности в километрах и шкалы грубого и точного отсчета дальности в кабельтовых.
Рисунок 9 – Внешний вид панелей КШУ, КШД и контроля параметров цели
Устройство сопровождения цели по дальности обеспечивает работу в нескольких режимах:
- ручное сопровождение;
- автоматическое сопровождение;
- инерционное сопровождение;
- прием целеуказания по дальности.
Особенностью системы МР-123 является наличие устройства перехвата и сопровождения по дальности ракеты, выпущенной с сопровождаемой цели. Конструкция дальномера ракеты аналогична дальномеру цели. Дальномер цели и дальномер ракеты сопряжены между собой так, что при автосопровождении цели, строб дальномера ракеты выставлен вперед с упреждением 1 км, что и обеспечивает захват, когда ракета обгоняет носитель.
Устройство выделения сигнала ошибки сопровождения цели по угловым координатам.
С приемного устройства основной и дополнительный сигналы цели также поступают в устройство выделения сигнала ошибки сопровождения цели по угловым координатам (ВСОУК).
Основная задача устройства ВСОУК выделение суммарного сигнала ошибки сопровождения цели антенным постом по курсовому углу и углу места.
Устройство также обеспечивает защиту РЛС от активных помех уводящих по углам и от пассивных помех.
Системы управления антенной по курсовому углу и углу места.
С ВСОУК суммарный сигнал ошибки сопровождения Uсо поступает на систему управления антенной по курсовому углу (СУАКУ) и на систему управления антенной по углу места (СУАУМ).
Назначение этих систем обеспечить формирование сигналов управления силовыми приводами антенны по КУ и УМ в различных режимах и подрежимах режимах работы системы управления: «Поиск» (ручной, автоматический круговой или секторный), «Прием ЦУ», «Захват», Сопровождение» (ручное, автоматическое, инерционное).
Но, основное назначение систем управления антенной по КУ и УМ – формирование сигналов управления для точного автоматического сопровождения цели антенной.
При автоматическом режиме сопровождения цели сигналы ошибки UсоКУ и UсоУМ с систем управления антенной усиливаются и поступают на силовые привода управления антенным постом.
Силовые привода наведения и стабилизации антенного поста.
В состав антенного поста входят четыре силовых привода:
- привод наведения антенны по курсовому углу;
- привод наведения антенны по углу места;
- привод стабилизации антенного поста по углу бортовой качки;
- привод стабилизации антенного поста по углу килевой качки.
По конструкции привода наведения и стабилизации антенны – это силовые электрические следящие привода, в состав которых входят:
- в качестве датчиков вращающиеся трансформаторы, тахогенераторы, в режиме автоматического сопровождения используется устройство ВСО;
- в качестве усилителей электронные усилители и электромашинные усилители типа ЭМУ-12А и ЭМУ-5А;
- в качестве исполнительных двигателей – силовые электродвигатели типа.
Привода наведения антенны обеспечивают работу РЛС в режимах работы: «Поиск», «Прием ЦУ», «Захват» и «Сопровождение». Поиск и сопровождение цели может осуществляться в ручном режиме с помощью штурвалов управления по КУ, УМ и Д, а также автоматически.
При сопровождении цели в автоматическом режиме сигнал управления поступает на приводы наведения антенной по КУ и УМ с системы управления антенной. По управляющим сигналам двигатели разворачивают антенну по КУ и УМ, ликвидируя ошибку сопровождения.
Привода стабилизации обеспечивают непосредственную стабилизацию основания антенного поста по углам бортовой и килевой качки. Текущие значения углов качек поступают с гироазимутгоризонта (ГАГ). Привода обеспечивают стабилизацию антенного поста при максимальных углах бортовой качки ±200 и килевой качки ±70.
С датчиков антенного поста текущие значения КУ и УМ цели поступают в счетно-решающий прибор (СРП) и на панель контрольных шкал углов (КШУ) для индикации.
Счетно-решающее устройство (СРУ).
Основное назначение СРУ - рассчитать углы наведения ствола артиллерийской установки в упрежденную точку (ПУГН и ПУВН), где будет цель за время полета снаряда, используя текущие координаты цели (КУц, УМц, Дц), поступающие с РЛС.
В процессе определения углов наведения АУ счетно-решающее устройство решает несколько задач:
Задача 1. Определяет элементы движения цели (ЭДЦ): курс цели (Кц), скорость цели (Vц), высоту цели (Нц), параметр цели (Рц), подлетное время цели до параметра (tпц), которые высвечиваются на панели контроля параметров цели (КП) (рис. 10).
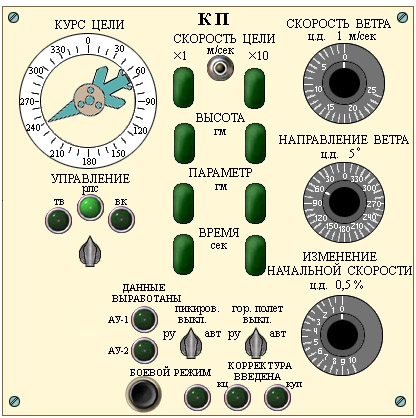
Рисунок 10 – Внешний вид панели контроля параметров цели
Задача 2. Решает задачу встречи снаряда с целью – определяет координаты упрежденной точки цели за время полета снаряда.
Задача 3. Решает баллистическую задачу - вводит метеорологические и баллистические поправки в координаты упрежденной точки, используя поправки, которые вводятся в ручную на панели контроля параметров прибора 3 (рис. 8):
- на изменение начальной скорости снаряда V0
- на направление ветра W
- на скорость ветра W.
Задача 4. Рассчитывает углы горизонтального наведения и вертикального наведения ствола артиллерийской установки в упрежденную точку стрельбы с учетом углов бортовой и килевой качки (ПУГН и ПУВН).
Счетно-решающее устройство представляет собой автоматическое устройство аналогового типа, в котором основными элементами являются вращающиеся трансформаторы, операционные усилители постоянного и переменных токов, следящие системы, дифференцирующие, сглаживающие, интегрирующие, запоминающие и электронные функциональные устройства. При решении задачи встречи снаряда с целью используется основная гипотеза, что за время полета снаряда цель летит равномерно и прямолинейно.
Работное время выработки углов наведения АУ составляет 5 секунд. В момент окончания решения основной задачи загорается сигнальная лампочка «Данные выработаны» для АУ-1 и АУ-2 на панели КП прибора 3.
Пульт управления артиллерийской установкой (ПУАРТ).
Дистанционное управление артиллерийской установкой осуществляется с пульта управления (ПУАРТ). Внешний вид ПУАРТа представлена на рисунке 11.
Рисунок 11 – Внешний вид пульта управления артиллерийской установки
Управляющий огнем с помощью тумблеров и переключателей на пульте осуществляет:
- подачу питания на АУ – кнопка «Питание»;
- включение приводов наведения АУ – тумблер «Привода-Вкл»;
-- включение системы охлаждения АУ;
- подключение датчиков приводов наведения АУ к датчикам СРП - тумблер «ДУ»;
- установку режима стрельбы:
- короткая очередь;
- программа.
- длинная очередь;
- включение цепи стрельбы – тумблер «ЦС»;
Наведение АУ осуществляется двумя электрогидравлическими следящими приводами.
При приходе цели на дальность открытия огня (таблица №2 в ПАС-В6) управляющий огнем нажимает на педаль замыкателя цепи стрельбы (прибор 34) и открывает огонь.
На индикаторных устройствах: ИКОС, индикатора отклонений (ИО), телевизионном индикаторе (ТИ), наблюдаются результаты и ошибки стрельбы, определяются значения необходимых корректур в т.д.
Корректуры в целик и угол прицеливания вводятся с обратным знаком вручную с помощью штурвалов КЦ и КУП, расположенных на панели ПУАРТа.
Резервные средства управления стрельбой.
При неисправности или подавлении системы управления помехами, когда невозможно осуществить поиск, сопровождение и стрельбу по цели радиолокационным способом, система управления обеспечивает управления стрельбой с помощью резервных устройств управления:
- с помощью телевизионно-оптического устройства (ТОУ);
- с помощью визирной колонки (ВК).
Телевизионно-оптическое устройство (ТОУ).
Телевизионно-оптическое устройство – представляет собой приемо-передающую систему замкнутого типа - электрический сигнал от передающего к приемному устройству передается по кабельной линии связи.
Устройство состоит из двух основных блоков:
- блока телевизионной передающей камеры (ТПК), который размещается на антенном посту и предназначен для преобразования оптического изображения в видеоизображение;
- блока телевизионного индикатора (ТИ), размещенного на передней панели прибора 3 и предназначенного для наблюдения телевизионного изображения цели.
Телевизионно-оптическое устройство обеспечивает:
- контроль точности автоматического сопровождения цели системой управления в основном радиолокационном режиме;
- визуальный поиск и обнаружение цели, определение её типа и боевых намерений по характеру маневра;
- ручное сопровождение цели по углам при неисправности СУ и в условиях помех;
- проведение прицельной стрельбы резервным способом по воздушным, морским и береговым целям при визуальной видимости цели;
- наблюдение результатов стрельбы и определение ошибок стрельбы.
При управлении стрельбой с помощью ТОУ осуществляется дистанционное (из центрального поста) наведение артустановки в упрежденную точку цели с помощью штурвалов управления КУ и УМ по телевизионному индикатору.
Визирная колонка (ВК).
Визирная колонка (ВК) – предназначена для упрощенного дистанционного наведения артустановок АК-630М на цель и выполнения стрельбы по воздушным, морским, и видимым береговым целям, а также плавающим минам с помощью механического кольцевого ракурсного палубного прицела.
Конструктивно ВК выполнена в виде прибора 1А и размещается на верхней палубе.
Имитатор-тренажер (ИТ).
Имитатор-тренажер системы управления МР-123 предназначен для:
- проведения тренировок боевого расчета без использования реальных воздушных и надводных средств обеспечения;
- выполнения стрельб по имитированным целям с качественной оценкой результатов;
- контроля функционирования отдельных частей системы без излучения в эфир в процессе повседневной эксплуатации;
ИТ формирует имитированный сигнал только одной цели на промежуточной частоте с параметрами соответствующими реальной цели.
Установка начальных координат и параметров движения цели осуществляется с помощью тумблеров и переключателей на передней панели прибора 7. Устройство не участвует в боевой работе системы управления.
Аппаратура автоматизированного контроля (ААК).
Аппаратура автоматизированного контроля системы управления МР-123 предназначена для ее автоматического непрерывного контроля работоспособности и позволяет осуществлять:
- автоматический последовательный допусковый контроль 320 параметров системы управления и высвечивать на световом табло места неисправности;
- независимый выборочный контроль параметров с цифровой индикацией их относительной величины и знака.
Аппаратура контроля не влияет на боевую работу системы управления. Аппаратура контроля является встроенной, так как первичные датчики контроля параметров непосредственно встроены в блоки и приборы системы управления. Управление датчиками и коммутационными узлами, обработка информации и индикация результатов контроля осуществляется центральным прибором 8. Контроль параметров является пассивным - без воздействия стимулирующих сигналов на объект контроля. Цикл опроса всех 320 параметров – 0,8 сек.
Силовое электропитание используется для обеспечения электроэнергией всех приборов и устройств системы МР-123. Для системы используется первичное силовое питание:
- 3-х фазное напряжение переменного тока 220В 400 Гц;
- напряжение постоянного тока ± 27В.
Напряжение 220В 400 Гц вырабатывается агрегатом АТТ-30-400, путем преобразования напряжения судовой сети 3-ф 380В 50 Гц (или 220В 50Гц). Напряжение ± 27В вырабатывается блоком П2-6А прибора 6А.
Включение и выключение системы, распределение электроэнергии между приборами системы, защита источников питания и приборов, контроль основных видов первичного электропитания, а также контроль времени наработки системы и ее составных частей осуществляется прибором 6.
Источники вторичного питания размещаются в приборах системы управления и обеспечивают питание приборов напряжением постоянного и переменного тока различных номиналов.