

2. Кинетостатический расчет механизма
2.1 Построение плана ускорений для рабочего и холостого положений.
Необходимо построить планы ускорений для рабочего положения.
Для построения плана ускорений необходимо изобразить кинематическую схему механизма в одном из рабочих положений. Выберем для изображения рабочего положенья, первое положение.
Для того чтобы построить кинематическую схему механизма
необходимо выбрать масштаб l: l=lO2A/O2A ,где
lO2A -истинная длинна звена в метрах, O2A - отрезок в миллиметрах на плане механизма.
Для определения масштаба l, выберем произвольную длину звена O2A.
O2A =50мм.
Следовательно
l = 0,1/50=0,002м/мм.
Производим построение рабочего положения в соответствии с выбранным масштабом (рис.2.1).
Вычерчиваем схему механизма по правилам пункта (п. 1.1.).
Вычисляем значение ускорения в точке А.
![]() =2lO2A=3.142*0,1=0,98м/с2
=2lO2A=3.142*0,1=0,98м/с2
Ускорение точки B найдём с помощью уравнения:
![]()
где
![]() – нормальное ускорение звена АB;
– нормальное ускорение звена АB;
![]() – тангенциальное
ускорение звена АB;
– тангенциальное
ускорение звена АB;
Учитывая, что :
=32*lAB=0,225 2 * 0.2=0,0101м/c2
С другой стороны ускорение точки B можно найти так:
![]() ;
;
![]() =42
lBO3=0,312*0,225=0.0216
м/с2
,
=42
lBO3=0,312*0,225=0.0216
м/с2
,
Ускорение точки C найдём с помощью следующего уравнения:
![]()
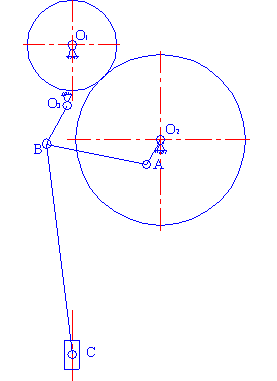
Рис2.1 Кинематическая схема механизма. Рабочий ход.
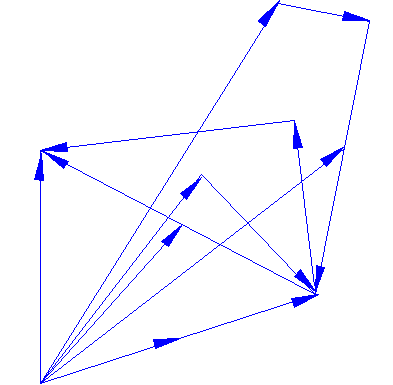
Рис 2.2 План ускорений.
где
![]() – нормальное ускорение точки C
в её вращательном движении вокруг точки
В;
– нормальное ускорение точки C
в её вращательном движении вокруг точки
В;
![]() – тангенциальное
ускорение точки А
в её вращательном движении вокруг точки
В;
– тангенциальное
ускорение точки А
в её вращательном движении вокруг точки
В;
WB – ускорение точки B.
Учитывая что :
=52 * lBС=1,04 2*0.54=0.658м/c2
Вычислим масштаб построения плана ускорений для холостого хода вычисляется по формуле:
![]() где WА
– ускорение точки А;
где WА
– ускорение точки А;
 (а)
– произвольный отрезок длинны вектора
ускорения А
на плане ускорений.
(а)
– произвольный отрезок длинны вектора
ускорения А
на плане ускорений.
П ринимаем
(а)
= 70 мм,
тогда :
ринимаем
(а)
= 70 мм,
тогда :
![]() =0,98/70=0,014
м/ммc2
=0,98/70=0,014
м/ммc2
Построение:
Построение начинается с записи уравнений, по которым и строиться план ускорений. Запишем эти уравнения:
![]() ,
,
,
,
![]() –
известно направление
и значение, параллельно звену О2А,
т.к.
=
–
известно направление
и значение, параллельно звену О2А,
т.к.
=![]() ,
а
,
а
![]() =0
так как точка А
совершает вращательное движение вокруг
точки О2
с постоянной угловой скоростью 2;
=0
так как точка А
совершает вращательное движение вокруг
точки О2
с постоянной угловой скоростью 2;
![]() –
известно значение
и направлен от точки В
к точке А;
–
известно значение
и направлен от точки В
к точке А;
![]() –
известно, что этот
вектор перпендикулярен звену ВА;
–
известно, что этот
вектор перпендикулярен звену ВА;
![]() –
известно направление
и значение , направлен от В
к О3;
–
известно направление
и значение , направлен от В
к О3;
![]() –
известно направление,
перпендикулярен звену ВО3;
–
известно направление,
перпендикулярен звену ВО3;
![]() –
известно значение
и направлен от точки С
к точке В;
–
известно значение
и направлен от точки С
к точке В;
![]() –
известно, что этот
вектор перпендикулярен звену СВ;
–
известно, что этот
вектор перпендикулярен звену СВ;
![]() –
известно направление,
вектор параллелен траектории движения
толкателя 6
;
–
известно направление,
вектор параллелен траектории движения
толкателя 6
;
Выбираем полюс π от которого начнём построение (рис.2.2);
Параллельно звену О2А по направлению от точки А к точке О2 из полюса π проводим вектор (πa) длинной 70мм, это и есть ускорение точки A;

 Из
конца вектора (πa)
параллельно звену АВ
в направлении от точки В
к точке А
со значением nBА=
/
=0,0101/0,014=0,721мм
проводим вектор nBА,
это и есть нормальное ускорение звена
АВ;
Из
конца вектора (πa)
параллельно звену АВ
в направлении от точки В
к точке А
со значением nBА=
/
=0,0101/0,014=0,721мм
проводим вектор nBА,
это и есть нормальное ускорение звена
АВ;Из конца вектора nBА перпендикулярно звену АВ проводим прямую ВА, будущий вектор ВА получится при пересечении с прямой ВО3;
 Из
полюса π
параллельно звену ВО3
в направлении от точки В
к точке О3
проводим вектор nВО3
со значением nВО3=
/
=1,54
мм - это и есть нормальное ускорение
звена ВО3;
Из
полюса π
параллельно звену ВО3
в направлении от точки В
к точке О3
проводим вектор nВО3
со значением nВО3=
/
=1,54
мм - это и есть нормальное ускорение
звена ВО3;Из конца вектора nВО3 перпендикулярно звену ВО3 проводим прямую до пересечения с прямой описанной в предыдущем пункте, получаем вектор ВО3, и направляем его к точке пересечения;
Полученную точку соединяем с полюсом π. Полученный вектор πb направляем к точке b, он и является ускорением точки B;
Из конца вектора πb параллельно звену СВ в направлении от точки С к точке В проводим вектор nСВ, со значением nСВ= / =47 мм, это нормальное ускорение звена ВС;
И
 з
конца вектора nСВ
перпендикулярно звену СВ
проводим прямую СВ,
будущий вектор СВ,
который получится при пересечении с
прямой параллельной траектории движения
точки С
. Полученную точку обозначим как с
.Соединим с
с π
получим вектор πс
направленный от π
к с,
этот вектор характеризует ускорение
точки С;
з
конца вектора nСВ
перпендикулярно звену СВ
проводим прямую СВ,
будущий вектор СВ,
который получится при пересечении с
прямой параллельной траектории движения
точки С
. Полученную точку обозначим как с
.Соединим с
с π
получим вектор πс
направленный от π
к с,
этот вектор характеризует ускорение
точки С;
Построение плана ускорений для холостого хода осуществляется по этим же правилам (рис.2.3).
Построение закончено.
Подсчитаем полученные данные с чертежа по следующим формулам:
![]() =
0,014м/ммc2
=
0,014м/ммc2
Запишем полученные значения в таблицу 2.1.