

1.3.2. Оптроны в роле датчиков
В основном в автоматических системах применяют оптопары с открытым оптическим каналом. Например, для считывания информации с перфолент, подсчета и отбраковки готовых деталей, а также в системах защиты обслуживающего персонала от производственного травматизма. В пункте 1.3.1 рассматриваются примеры оптопар с открытым каналом состоящие из лампы накаливания и фотосопротивления или фотодиода.
1.4. Первичные преобразователи не электрического типа
В настоящее время гидравлические и пневматические системы и элементы автоматики в основном использую в силовых устройствах и приводах.
Для исполнения команд по управлению агрегатами гидравлическая система должна содержать в себе устройства, которые обеспечивают получение управляющей команды, преобразуют управляющий сигнал в силовое воздействие и сигнализируют об исполнении управляющих команд. Для этого используют гидравлические и пневматические первичные преобразователи (датчики).
Гидравлические и пневматические первичные преобразователи (датчики) классифицируются:
по конструкции;
- золотниковые;
- сопло- заслонка;
- сильфонные;
по характеру получения сигнала от измеряемой величины;
- давление;
- объем;
- электроконтактный;
по характеру зависимости выходного сигнала от входного сигнала;
- пропорциональные;
- релейные;
по входному измеряемому параметру;
- измерение линейных размеров;
- измерение угловых размеров;
по назначению в САУ
- измерения;
- датчики пут.
Различают манометрические и ротаметрические преобразователи. Первые реагируют на изменение давления в рабочей камере, вторые – на изменение скорости воздушного потока.
Конструкция некоторых пневматических датчиков представлена на рис.16, а) ротаметрический преобразователь и б) манометрический преобразователь.
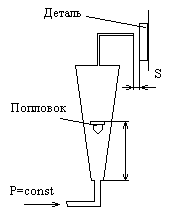
а).
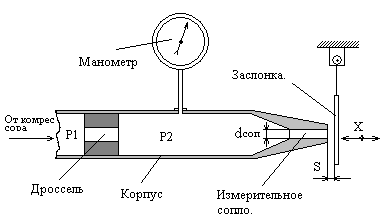
б).
Рис 16. Конструкции ротаметрического а) и манометрического б) преобразователей.
Рассмотрим измеритель размеров на основе ротаметрического преобразователя. Прибор с пневматическим ротаметром-длинномером изображен на рис.17.
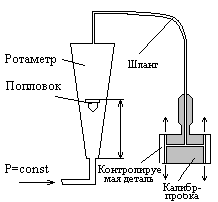
Рис.17. Ручной пневматический измерительный прибор.
Прибор подключают к пневмосети через фильтры и стабилизаторы давления воздуха. Отчетное устройство (ротаметр) подсоединяют с помощью шланга к калибр-пробке. Очищенный воздух подводится в коническую стеклянную трубку ротаметра, в которой находится поплавок и далее к измерительному калибр-пробке, контролирующий отверстие детали.
Характеристика пневматического преобразователя изображенного на рис.16.
Р = f(S).
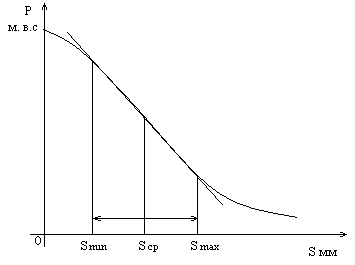
Рис.18. Характеристика манометрического преобразователя.
Характеристика в целом нелинейная, хотя, имеется линейный участок от Smin до Smax используемый для измерений. На данном участке погрешность измерений минимальна.
В качестве управляющего органа в гидравлических усилителях применяют преобразователи типа; золотники, струйные трубки. На рис.19 представлен эскиз золотника.
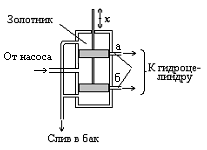
Рис. 19. Эскиз золотника.
Золотник состоит из цилиндра (гильза), в котором перемещаются жестко связанные между собой два поршня под воздействием внешнего перемещения величины х. В исходном состоянии окна а и б перекрыты. Рабочая жидкость поступает от нагнетательного насоса в полость между поршнями. При изменении величины х края поршней отходят от нейтрального положения и открывают окна а и б. В зависимости от знака входной величины будет меняться направление движения рабочей жидкости через окна. Проходное сечение окон а и б в цилиндре зависит от входной величины х. Данный преобразователь можно применить для измерения линейных размеров, в системах управления с упорами, в гидроусилителях.